Comparar commits
470 Commits
| Autor | SHA1 | Data | |
|---|---|---|---|
|
|
447445388e | ||
|
|
b2c66816d7 | ||
|
|
b6f81c6cc3 | ||
|
|
98b289630a | ||
|
|
d68c0bd795 | ||
|
|
5afda71f74 | ||
|
|
1b08a8d675 | ||
|
|
b508ab64bd | ||
|
|
84f435e24b | ||
|
|
984ad34a61 | ||
|
|
ad3231c29a | ||
|
|
c3d20bbc53 | ||
|
|
f9c03f183f | ||
|
|
046a3c8a28 | ||
|
|
05883934f1 | ||
|
|
97d2a73dd3 | ||
|
|
5367a44acb | ||
|
|
1deaf71388 | ||
|
|
99f564e972 | ||
|
|
c725f8d354 | ||
|
|
257ace722c | ||
|
|
0cd9d46828 | ||
|
|
cef9e28a6c | ||
|
|
6c42da2abf | ||
|
|
a9fc2bed49 | ||
|
|
1855c49d1f | ||
|
|
cce65ce34d | ||
|
|
70866c0154 | ||
|
|
d06e3753b0 | ||
|
|
cb4de1f859 | ||
|
|
b6d23b2e2d | ||
|
|
6a8815de0c | ||
|
|
e0179bad2f | ||
|
|
8778add0d6 | ||
|
|
facc823612 | ||
|
|
b91854ea9d | ||
|
|
05abe814ac | ||
|
|
ea561ba6d8 | ||
|
|
df84c69676 | ||
|
|
3726aba2ee | ||
|
|
f6bcaffe4a | ||
|
|
c689b52dd1 | ||
|
|
09d75a4347 | ||
|
|
59bd247603 | ||
|
|
f221ef952f | ||
|
|
d3c75e1d34 | ||
|
|
3aab55d29f | ||
|
|
f9ef72c38a | ||
|
|
108159ed17 | ||
|
|
defa1283c4 | ||
|
|
2788b60fe6 | ||
|
|
7e70e1768f | ||
|
|
896ba77061 | ||
|
|
c034262b78 | ||
|
|
b7edcf6eea | ||
|
|
23e1ad2df7 | ||
|
|
0a3939883a | ||
|
|
3c8f91ee3d | ||
|
|
efa5b04797 | ||
|
|
2da66ed009 | ||
|
|
2ac6811362 | ||
|
|
74c51f213c | ||
|
|
4302d8060d | ||
|
|
576cf8978b | ||
|
|
3533912016 | ||
|
|
cf9922ff1d | ||
|
|
4fa65fbb2f | ||
|
|
f502ee2338 | ||
|
|
7a56925176 | ||
|
|
0a108b3fb2 | ||
|
|
381a108e6d | ||
|
|
726c9fc8a6 | ||
|
|
946ccd3228 | ||
|
|
8e1ebbfc11 | ||
|
|
cc0e60c101 | ||
|
|
ff3f00d845 | ||
|
|
40195c2fa2 | ||
|
|
7f7300b8cb | ||
|
|
1b158ff4ed | ||
|
|
b686b85b52 | ||
|
|
8fa82ae5cb | ||
|
|
0d5289141e | ||
|
|
01d5e7bc47 | ||
|
|
cfbaec60c7 | ||
|
|
f3e7245910 | ||
|
|
892d9fae84 | ||
|
|
796f895f01 | ||
|
|
489bb4eb10 | ||
|
|
8f458066bb | ||
|
|
5dd7454260 | ||
|
|
571db82371 | ||
|
|
d971e0cca5 | ||
|
|
fde0aac733 | ||
|
|
b9d904c12f | ||
|
|
aa2ec42da6 | ||
|
|
d90d473104 | ||
|
|
5a1e63990a | ||
|
|
e836c10c6f | ||
|
|
47c09d9557 | ||
|
|
b35b943364 | ||
|
|
ca467cc50e | ||
|
|
51f7cf0367 | ||
|
|
642eaca618 | ||
|
|
55e5680535 | ||
|
|
52ea31b65c | ||
|
|
b3a26a5b30 | ||
|
|
98974efa5f | ||
|
|
b6a776b242 | ||
|
|
1ea3f44f06 | ||
|
|
64e1320ca0 | ||
|
|
6e0b50fbdc | ||
|
|
22502a8fe8 | ||
|
|
a78ad01bb4 | ||
|
|
729e802e85 | ||
|
|
3ffff6d579 | ||
|
|
6e5f97fca5 | ||
|
|
eaff5bdfd7 | ||
|
|
28819d36a4 | ||
|
|
f9a4f6f306 | ||
|
|
27c83c693d | ||
|
|
d106908a57 | ||
|
|
b4adce34dc | ||
|
|
3927505d1a | ||
|
|
ede79f818e | ||
|
|
742ac53262 | ||
|
|
ee17ccc374 | ||
|
|
835a02c037 | ||
|
|
ee8ff00a2a | ||
|
|
229f13a864 | ||
|
|
0d60d637af | ||
|
|
c20e34a8b0 | ||
|
|
8d3f39852a | ||
|
|
aa45dee5a4 | ||
|
|
885e6e621b | ||
|
|
dc122c31ef | ||
|
|
3bc80d3db4 | ||
|
|
439f2f3b2b | ||
|
|
a1610eb274 | ||
|
|
6b90eff03c | ||
|
|
4d404d1a54 | ||
|
|
fffa6a80ca | ||
|
|
3f6b38b34f | ||
|
|
8166a55761 | ||
|
|
89f6d374e9 | ||
|
|
9b3c2cf348 | ||
|
|
76406dd0c2 | ||
|
|
d266b75423 | ||
|
|
5bb5eb1657 | ||
|
|
258cf3b0f7 | ||
|
|
cdb5b09cd7 | ||
|
|
cb3469215a | ||
|
|
703c2925b3 | ||
|
|
b6ca3ef051 | ||
|
|
b235f91cc7 | ||
|
|
3513472467 | ||
|
|
60e0c96f6c | ||
|
|
e37df7ca85 | ||
|
|
a13a35fe52 | ||
|
|
f421600218 | ||
|
|
2a4492d74f | ||
|
|
10368d867f | ||
|
|
936360020c | ||
|
|
c53c64d7fa | ||
|
|
6b122ba25f | ||
|
|
6501b587c0 | ||
|
|
53aaa842ed | ||
|
|
dc569e952d | ||
|
|
c9aee4126e | ||
|
|
7397f4b0d0 | ||
|
|
3b83a1b1ac | ||
|
|
8f8e4574dc | ||
|
|
c30432a665 | ||
|
|
c4c2d8bbd4 | ||
|
|
e49ba233f9 | ||
|
|
cea6c1821f | ||
|
|
ab4bf447c6 | ||
|
|
4e0c8cf25b | ||
|
|
e4b3a052a4 | ||
|
|
825beb42c4 | ||
|
|
c8d605db55 | ||
|
|
f6ecab58cb | ||
|
|
d7e39347b9 | ||
|
|
25c10af596 | ||
|
|
ded23f14c7 | ||
|
|
b0d52d930a | ||
|
|
af5c5b6a55 | ||
|
|
ce51e19970 | ||
|
|
97e31b6090 | ||
|
|
62053e68e2 | ||
|
|
489c07e748 | ||
|
|
604ea8d68a | ||
|
|
fd3cfb196b | ||
|
|
b71f6ba864 | ||
|
|
dfc128b89a | ||
|
|
34b8b57c2f | ||
|
|
3bba409d9e | ||
|
|
7869cdccec | ||
|
|
0e18e345b0 | ||
|
|
e5b99c7512 | ||
|
|
7d4c85018a | ||
|
|
edbec2dbc9 | ||
|
|
973ece9809 | ||
|
|
90f441a6a0 | ||
|
|
5a71090476 | ||
|
|
76cae0ec44 | ||
|
|
273f0dda9d | ||
|
|
882b5a1d89 | ||
|
|
8c84ad1a86 | ||
|
|
80bfec7253 | ||
|
|
91b930298b | ||
|
|
9c56b91548 | ||
|
|
7b5bab83f4 | ||
|
|
c5e2116ead | ||
|
|
d9db73a791 | ||
|
|
01ece4ef7b | ||
|
|
601f3e7cdb | ||
|
|
a9ca2c547f | ||
|
|
594cbed03b | ||
|
|
3938a905a1 | ||
|
|
88d523e01b | ||
|
|
0419fe67fc | ||
|
|
33ddeb5cbe | ||
|
|
1f5d5b391b | ||
|
|
198c515208 | ||
|
|
5156673e17 | ||
|
|
1529c9c438 | ||
|
|
32b10a8832 | ||
|
|
24501d4361 | ||
|
|
bf0c08e24a | ||
|
|
34d8cce6bc | ||
|
|
f0bfc24adc | ||
|
|
2f8acfe4bf | ||
|
|
e2fb8b2786 | ||
|
|
ebbc4d9fb8 | ||
|
|
8fc5b90e9a | ||
|
|
8a717f5b6c | ||
|
|
aa91994166 | ||
|
|
2091347a71 | ||
|
|
e0ed174f2c | ||
|
|
8c2a573ebf | ||
|
|
d7ff7cde92 | ||
|
|
15d0b0ea08 | ||
|
|
3695bc2db5 | ||
|
|
a08995a90d | ||
|
|
aea00258e7 | ||
|
|
b581eb3f27 | ||
|
|
610ccba9f5 | ||
|
|
d5ae6f32dd | ||
|
|
5308033936 | ||
|
|
e2abb5ef2c | ||
|
|
1b11b4eeb6 | ||
|
|
39357b3045 | ||
|
|
ed7a5a1418 | ||
|
|
ae682a71f9 | ||
|
|
8327b37a0b | ||
|
|
973b5570aa | ||
|
|
7cb41fc5cc | ||
|
|
595d67ad7d | ||
|
|
bb626c120e | ||
|
|
ba8fefa8ec | ||
|
|
4b24f6d7b1 | ||
|
|
1c460e1e08 | ||
|
|
7b4e157356 | ||
|
|
5749f1b971 | ||
|
|
3c57aff85b | ||
|
|
18504bcc86 | ||
|
|
d8864bfe48 | ||
|
|
078b20169b | ||
|
|
5f7e78df65 | ||
|
|
fc470db7ab | ||
|
|
f576f37801 | ||
|
|
b74118a766 | ||
|
|
1c7a0248b9 | ||
|
|
36a829c20d | ||
|
|
33af75aa39 | ||
|
|
844420425e | ||
|
|
da57a530f9 | ||
|
|
1f17013949 | ||
|
|
f18899cb36 | ||
|
|
877f946e24 | ||
|
|
a981a8c42c | ||
|
|
5467107fc9 | ||
|
|
ad3107073b | ||
|
|
8d62f4da6c | ||
|
|
3779b8a008 | ||
|
|
6ec5e48969 | ||
|
|
bfa5ca553d | ||
|
|
c9f7d970e9 | ||
|
|
f26ce6e236 | ||
|
|
b001e36f18 | ||
|
|
9abb6ef723 | ||
|
|
bfbdbb05bc | ||
|
|
bd2bd51b5d | ||
|
|
4e547a31ed | ||
|
|
de8d0defcd | ||
|
|
344437c491 | ||
|
|
ed365e94fd | ||
|
|
5910278ca8 | ||
|
|
18841fa58d | ||
|
|
6fb4e0e441 | ||
|
|
39051ef3ca | ||
|
|
1f4084870b | ||
|
|
00e9d5b219 | ||
|
|
7f93747602 | ||
|
|
a7156b8c27 | ||
|
|
b1e47f7741 | ||
|
|
59f8d6ca22 | ||
|
|
5f4019d980 | ||
|
|
f84389da08 | ||
|
|
63c1757df5 | ||
|
|
d6ab850f45 | ||
|
|
61dd53e262 | ||
|
|
423a633b5b | ||
|
|
256d4ef71b | ||
|
|
ad49962ba9 | ||
|
|
4680d70a78 | ||
|
|
ee7f056779 | ||
|
|
66c8d7baf2 | ||
|
|
9f929999d1 | ||
|
|
24f96262ec | ||
|
|
0e6e7a41f4 | ||
|
|
5cac088d98 | ||
|
|
85f0448fee | ||
|
|
106c0b753a | ||
|
|
c525e634dc | ||
|
|
c398c0891b | ||
|
|
5ab48ac5d4 | ||
|
|
ba29cd8e46 | ||
|
|
b61235b77f | ||
|
|
0ed00e38f0 | ||
|
|
36eef0dd9a | ||
|
|
1904194c7a | ||
|
|
7ce144881a | ||
|
|
55159cf451 | ||
|
|
7a12fd0f85 | ||
|
|
9d60126661 | ||
|
|
e341e73c6a | ||
|
|
5dad3786f6 | ||
|
|
ed0cd2c60d | ||
|
|
2eea3a4c5d | ||
|
|
090a46763e | ||
|
|
c4ed82cdf6 | ||
|
|
b32248d615 | ||
|
|
ca7437502b | ||
|
|
fe9b797a46 | ||
|
|
b8059aeaba | ||
|
|
85f80714c2 | ||
|
|
2cc9ebf28b | ||
|
|
cb5d69c769 | ||
|
|
3b961a6b7b | ||
|
|
cba3ea9d90 | ||
|
|
57ea065db7 | ||
|
|
4f5f88b9ba | ||
|
|
c1c2b330a1 | ||
|
|
05e1d8e5f4 | ||
|
|
3cbca7bdba | ||
|
|
3e3c210f1d | ||
|
|
cb65139aa8 | ||
|
|
1206120d10 | ||
|
|
80ebe80138 | ||
|
|
fa1d6b478e | ||
|
|
345413fb8c | ||
|
|
66ebd2a843 | ||
|
|
d50f469c09 | ||
|
|
26714bc635 | ||
|
|
30208ae08b | ||
|
|
6ea3188971 | ||
|
|
1db555a530 | ||
|
|
0772210dea | ||
|
|
df42e997b7 | ||
|
|
1e71732600 | ||
|
|
141e05e3a7 | ||
|
|
cadd3e4e2c | ||
|
|
09034d9e17 | ||
|
|
5706d1d688 | ||
|
|
41b9777746 | ||
|
|
d31fe1ac34 | ||
|
|
c0eedfeca0 | ||
|
|
dc8b5509f3 | ||
|
|
ddec052dab | ||
|
|
2e45022c95 | ||
|
|
cec7f73bca | ||
|
|
30989dc997 | ||
|
|
50a0d1cad4 | ||
|
|
3db1f132a7 | ||
|
|
3b196feda5 | ||
|
|
dd766c68d9 | ||
|
|
599e070824 | ||
|
|
04c998a742 | ||
|
|
cc985c3a9c | ||
|
|
36cc508030 | ||
|
|
444cd56740 | ||
|
|
88a86f7e45 | ||
|
|
d6f94c0bc9 | ||
|
|
2157aa6172 | ||
|
|
2013527840 | ||
|
|
8c73c6f218 | ||
|
|
63059f6063 | ||
|
|
e179198410 | ||
|
|
ed4a95bdad | ||
|
|
1baddb9094 | ||
|
|
3160a445a8 | ||
|
|
d627fd8781 | ||
|
|
b4bdc5a0fa | ||
|
|
6911fa2cba | ||
|
|
0d7c8711bd | ||
|
|
d8b0fe0957 | ||
|
|
263de77a5a | ||
|
|
d3615e682e | ||
|
|
35da9d6ef2 | ||
|
|
dbe7662e72 | ||
|
|
30118bbab0 | ||
|
|
2902149f77 | ||
|
|
eb8b40cccd | ||
|
|
76da13dff6 | ||
|
|
f7cbdff79c | ||
|
|
81233b3cd3 | ||
|
|
af88e051fa | ||
|
|
6ad6b19bd6 | ||
|
|
0242ca59ac | ||
|
|
c064963ef8 | ||
|
|
4318718769 | ||
|
|
f981bdb551 | ||
|
|
3860e078a5 | ||
|
|
d09e2a67bb | ||
|
|
56ba6b9c7e | ||
|
|
a9c6f26412 | ||
|
|
73817b8b77 | ||
|
|
3f128b9838 | ||
|
|
9621bb5b8e | ||
|
|
836fb03aa0 | ||
|
|
c3aaf50b64 | ||
|
|
fe00f5ff64 | ||
|
|
8b3543fca9 | ||
|
|
a6fe2ae341 | ||
|
|
3ca7751445 | ||
|
|
ebfde534c0 | ||
|
|
f8c7dbb758 | ||
|
|
62f9053330 | ||
|
|
c429e651c1 | ||
|
|
dacf017d38 | ||
|
|
dc3c1488bb | ||
|
|
4d7ff76cfb | ||
|
|
8ad6865952 | ||
|
|
2a4f6b942d | ||
|
|
91a819fb34 | ||
|
|
52dbeb1f26 | ||
|
|
0836e47dfc | ||
|
|
75bef59016 | ||
|
|
337c0c66cf | ||
|
|
f8e2df16f1 | ||
|
|
10deb8f267 | ||
|
|
efe5916109 | ||
|
|
64449c196e | ||
|
|
f57128bd3d | ||
|
|
8740791d5c | ||
|
|
6ddb5a0452 | ||
|
|
133699c2f3 | ||
|
|
b0ea92bc12 | ||
|
|
b587aeee1c | ||
|
|
e754581ecb | ||
|
|
fcb6ae8eed | ||
|
|
bf4dab3501 | ||
|
|
a066cf8680 | ||
|
|
7448dcea65 | ||
|
|
cf3b3dff32 | ||
|
|
ca96737b20 | ||
|
|
61ade48343 | ||
|
|
295bfe4e3a | ||
|
|
1145fec39f |
+4
-2
@@ -49,14 +49,16 @@ install:
|
||||
|
||||
# install TensorFlow
|
||||
- if [[ "$TRAVIS_PYTHON_VERSION" == "2.7" ]]; then
|
||||
pip install https://storage.googleapis.com/tensorflow/linux/cpu/tensorflow-0.6.0-cp27-none-linux_x86_64.whl;
|
||||
pip install https://storage.googleapis.com/tensorflow/linux/cpu/tensorflow-0.9.0-cp27-none-linux_x86_64.whl;
|
||||
elif [[ "$TRAVIS_PYTHON_VERSION" == "3.4" ]]; then
|
||||
pip install https://storage.googleapis.com/tensorflow/linux/cpu/tensorflow-0.6.0-cp34-none-linux_x86_64.whl;
|
||||
pip install https://storage.googleapis.com/tensorflow/linux/cpu/tensorflow-0.9.0-cp34-cp34m-linux_x86_64.whl;
|
||||
fi
|
||||
# command to run tests
|
||||
script:
|
||||
# run keras backend init to initialize backend config
|
||||
- python -c "import keras.backend"
|
||||
# create dataset directory to avoid concurrent directory creation at runtime
|
||||
- mkdir ~/.keras/datasets
|
||||
# set up keras backend
|
||||
- sed -i -e 's/"backend":[[:space:]]*"[^"]*/"backend":\ "'$KERAS_BACKEND'/g' ~/.keras/keras.json;
|
||||
- echo -e "Running tests with the following config:\n$(cat ~/.keras/keras.json)"
|
||||
|
||||
+16
-16
@@ -1,6 +1,8 @@
|
||||
# Keras: Deep Learning library for Theano and TensorFlow
|
||||
|
||||

|
||||
[](https://travis-ci.org/fchollet/keras)
|
||||
[](https://badge.fury.io/py/keras)
|
||||
[](https://github.com/fchollet/keras/blob/master/LICENSE)
|
||||
|
||||
## You have just found Keras.
|
||||
|
||||
@@ -37,9 +39,9 @@ Keras is compatible with: __Python 2.7-3.5__.
|
||||
|
||||
## Getting started: 30 seconds to Keras
|
||||
|
||||
The core data structure of Keras is a __model__, a way to organize layers. There are two types of models: [`Sequential`](http://keras.io/models/#sequential) and [`Graph`](http://keras.io/models/#graph).
|
||||
The core data structure of Keras is a __model__, a way to organize layers. The main type of model is the [`Sequential`](http://keras.io/getting-started/sequential-model-guide) model, a linear stack of layers. For more complex architectures, you should use the [Keras functional API](http://keras.io/getting-started/functional-api-guide).
|
||||
|
||||
Here's the `Sequential` model (a linear pile of layers):
|
||||
Here's the `Sequential` model:
|
||||
|
||||
```python
|
||||
from keras.models import Sequential
|
||||
@@ -50,17 +52,17 @@ model = Sequential()
|
||||
Stacking layers is as easy as `.add()`:
|
||||
|
||||
```python
|
||||
from keras.layers.core import Dense, Activation
|
||||
from keras.layers import Dense, Activation
|
||||
|
||||
model.add(Dense(output_dim=64, input_dim=100, init="glorot_uniform"))
|
||||
model.add(Dense(output_dim=64, input_dim=100))
|
||||
model.add(Activation("relu"))
|
||||
model.add(Dense(output_dim=10, init="glorot_uniform"))
|
||||
model.add(Dense(output_dim=10))
|
||||
model.add(Activation("softmax"))
|
||||
```
|
||||
|
||||
Once your model looks good, configure its learning process with `.compile()`:
|
||||
```python
|
||||
model.compile(loss='categorical_crossentropy', optimizer='sgd')
|
||||
model.compile(loss='categorical_crossentropy', optimizer='sgd', metrics=['accuracy'])
|
||||
```
|
||||
|
||||
If you need to, you can further configure your optimizer. A core principle of Keras is to make things reasonably simple, while allowing the user to be fully in control when they need to (the ultimate control being the easy extensibility of the source code).
|
||||
@@ -81,7 +83,7 @@ model.train_on_batch(X_batch, Y_batch)
|
||||
|
||||
Evaluate your performance in one line:
|
||||
```python
|
||||
objective_score = model.evaluate(X_test, Y_test, batch_size=32)
|
||||
loss_and_metrics = model.evaluate(X_test, Y_test, batch_size=32)
|
||||
```
|
||||
|
||||
Or generate predictions on new data:
|
||||
@@ -90,11 +92,14 @@ classes = model.predict_classes(X_test, batch_size=32)
|
||||
proba = model.predict_proba(X_test, batch_size=32)
|
||||
```
|
||||
|
||||
Building a network of LSTMs, a deep CNN, a Neural Turing Machine, a word2vec embedder or any other model is just as fast. The ideas behind deep learning are simple, so why should their implementation be painful?
|
||||
Building a question answering system, an image classification model, a Neural Turing Machine, a word2vec embedder or any other model is just as fast. The ideas behind deep learning are simple, so why should their implementation be painful?
|
||||
|
||||
Have a look at these [starter examples](http://keras.io/examples/).
|
||||
For a more in-depth tutorial about Keras, you can check out:
|
||||
|
||||
In the [examples folder](https://github.com/fchollet/keras/tree/master/examples) of the repo, you will find more advanced models: question-answering with memory networks, text generation with stacked LSTMs, neural turing machines, etc.
|
||||
- [Getting started with the Sequential model](http://keras.io/getting-started/sequential-model-guide)
|
||||
- [Getting started with the functional API](http://keras.io/getting-started/functional-api-guide)
|
||||
|
||||
In the [examples folder](https://github.com/fchollet/keras/tree/master/examples) of the repository, you will find more advanced models: question-answering with memory networks, text generation with stacked LSTMs, etc.
|
||||
|
||||
|
||||
------------------
|
||||
@@ -114,11 +119,6 @@ Keras uses the following dependencies:
|
||||
- Theano
|
||||
- [See installation instructions](http://deeplearning.net/software/theano/install.html#install).
|
||||
|
||||
**Note**: You should use the latest version of Theano, not the PyPI version. Install it with:
|
||||
```
|
||||
sudo pip install git+git://github.com/Theano/Theano.git
|
||||
```
|
||||
|
||||
*When using the TensorFlow backend:*
|
||||
|
||||
- TensorFlow
|
||||
|
||||
@@ -0,0 +1,46 @@
|
||||
FROM nvidia/cuda:7.5-cudnn5-devel
|
||||
|
||||
ENV CONDA_DIR /opt/conda
|
||||
ENV PATH $CONDA_DIR/bin:$PATH
|
||||
|
||||
RUN mkdir -p $CONDA_DIR && \
|
||||
echo export PATH=$CONDA_DIR/bin:'$PATH' > /etc/profile.d/conda.sh && \
|
||||
apt-get update && \
|
||||
apt-get install -y wget git libhdf5-dev g++ graphviz && \
|
||||
wget --quiet https://repo.continuum.io/miniconda/Miniconda3-3.9.1-Linux-x86_64.sh && \
|
||||
echo "6c6b44acdd0bc4229377ee10d52c8ac6160c336d9cdd669db7371aa9344e1ac3 *Miniconda3-3.9.1-Linux-x86_64.sh" | sha256sum -c - && \
|
||||
/bin/bash /Miniconda3-3.9.1-Linux-x86_64.sh -f -b -p $CONDA_DIR && \
|
||||
rm Miniconda3-3.9.1-Linux-x86_64.sh
|
||||
|
||||
ENV NB_USER keras
|
||||
ENV NB_UID 1000
|
||||
|
||||
RUN useradd -m -s /bin/bash -N -u $NB_UID $NB_USER && \
|
||||
mkdir -p $CONDA_DIR && \
|
||||
chown keras $CONDA_DIR -R && \
|
||||
mkdir -p /src && \
|
||||
chown keras /src
|
||||
|
||||
USER keras
|
||||
|
||||
# Python
|
||||
ARG python_version=3.5.1
|
||||
ARG tensorflow_version=0.9.0rc0-cp35-cp35m
|
||||
RUN conda install -y python=${python_version} && \
|
||||
pip install https://storage.googleapis.com/tensorflow/linux/gpu/tensorflow-${tensorflow_version}-linux_x86_64.whl && \
|
||||
pip install git+git://github.com/Theano/Theano.git && \
|
||||
pip install ipdb pytest pytest-cov python-coveralls coverage==3.7.1 pytest-xdist pep8 pytest-pep8 pydot_ng && \
|
||||
conda install Pillow scikit-learn notebook pandas matplotlib nose pyyaml six h5py && \
|
||||
pip install git+git://github.com/fchollet/keras.git && \
|
||||
conda clean -yt
|
||||
|
||||
ADD theanorc /home/keras/.theanorc
|
||||
|
||||
ENV PYTHONPATH='/src/:$PYTHONPATH'
|
||||
|
||||
WORKDIR /src
|
||||
|
||||
EXPOSE 8888
|
||||
|
||||
CMD jupyter notebook --port=8888 --ip=0.0.0.0
|
||||
|
||||
@@ -0,0 +1,26 @@
|
||||
help:
|
||||
@cat Makefile
|
||||
|
||||
DATA?="${HOME}/Data"
|
||||
GPU?=0
|
||||
DOCKER_FILE=Dockerfile
|
||||
DOCKER=GPU=$(GPU) nvidia-docker
|
||||
BACKEND=tensorflow
|
||||
TEST=tests/
|
||||
SRC=$(shell dirname `pwd`)
|
||||
|
||||
build:
|
||||
docker build -t keras --build-arg python_version=3.5 -f $(DOCKER_FILE) .
|
||||
|
||||
bash: build
|
||||
$(DOCKER) run -it -v $(SRC):/src -v $(DATA):/data --env KERAS_BACKEND=$(BACKEND) keras bash
|
||||
|
||||
ipython: build
|
||||
$(DOCKER) run -it -v $(SRC):/src -v $(DATA):/data --env KERAS_BACKEND=$(BACKEND) keras ipython
|
||||
|
||||
notebook: build
|
||||
$(DOCKER) run -it -v $(SRC):/src -v $(DATA):/data --net=host --env KERAS_BACKEND=$(BACKEND) keras
|
||||
|
||||
test: build
|
||||
$(DOCKER) run -it -v $(SRC):/src -v $(DATA):/data --env KERAS_BACKEND=$(BACKEND) keras py.test $(TEST)
|
||||
|
||||
@@ -0,0 +1,58 @@
|
||||
# Using Keras via Docker
|
||||
|
||||
This directory contains `Dockerfile` to make it easy to get up and running with
|
||||
Keras via [Docker](http://www.docker.com/).
|
||||
|
||||
## Installing Docker
|
||||
|
||||
General installation instructions are
|
||||
[on the Docker site](https://docs.docker.com/installation/), but we give some
|
||||
quick links here:
|
||||
|
||||
* [OSX](https://docs.docker.com/installation/mac/): [docker toolbox](https://www.docker.com/toolbox)
|
||||
* [ubuntu](https://docs.docker.com/installation/ubuntulinux/)
|
||||
|
||||
## Running the container
|
||||
|
||||
We are using `Makefile` to simplify docker commands within make commands.
|
||||
|
||||
Build the container and start a jupyter notebook
|
||||
|
||||
$ make notebook
|
||||
|
||||
Build the container and start an iPython shell
|
||||
|
||||
$ make ipython
|
||||
|
||||
Build the container and start a bash
|
||||
|
||||
$ make bash
|
||||
|
||||
For GPU support install NVidia drivers (ideally latest) and
|
||||
[nvidia-docker](https://github.com/NVIDIA/nvidia-docker). Run using
|
||||
|
||||
$ make notebook GPU=0 # or [ipython, bash]
|
||||
|
||||
Switch between Theano and TensorFlow
|
||||
|
||||
$ make notebook BACKEND=theano
|
||||
$ make notebook BACKEND=tensorflow
|
||||
|
||||
Mount a volume for external data sets
|
||||
|
||||
$ make DATA=~/mydata
|
||||
|
||||
Prints all make tasks
|
||||
|
||||
$ make help
|
||||
|
||||
You can change Theano parameters by editing `/docker/theanorc`.
|
||||
|
||||
|
||||
Note: If you would have a problem running nvidia-docker you may try the old way
|
||||
we have used. But it is not recommended. If you find a bug in the nvidia-docker report
|
||||
it there please and try using the nvidia-docker as described above.
|
||||
|
||||
$ export CUDA_SO=$(\ls /usr/lib/x86_64-linux-gnu/libcuda.* | xargs -I{} echo '-v {}:{}')
|
||||
$ export DEVICES=$(\ls /dev/nvidia* | xargs -I{} echo '--device {}:{}')
|
||||
$ docker run -it -p 8888:8888 $CUDA_SO $DEVICES gcr.io/tensorflow/tensorflow:latest-gpu
|
||||
@@ -0,0 +1,5 @@
|
||||
[global]
|
||||
floatX = float32
|
||||
optimizer=None
|
||||
device = gpu
|
||||
|
||||
+278
-109
@@ -1,9 +1,68 @@
|
||||
# -*- coding: utf-8 -*-
|
||||
'''
|
||||
General documentation architecture:
|
||||
|
||||
Home
|
||||
Index
|
||||
|
||||
- Getting started
|
||||
Getting started with the sequential model
|
||||
Getting started with the functional api
|
||||
Examples
|
||||
FAQ
|
||||
Installation guide
|
||||
|
||||
- Models
|
||||
About Keras models
|
||||
explain when one should use Sequential or functional API
|
||||
explain compilation step
|
||||
explain weight saving, weight loading
|
||||
explain serialization, deserialization
|
||||
Sequential
|
||||
Model (functional API)
|
||||
|
||||
- Layers
|
||||
About Keras layers
|
||||
explain common layer functions: get_weights, set_weights, get_config
|
||||
explain input_shape
|
||||
explain usage on non-Keras tensors
|
||||
Core layers
|
||||
Convolutional
|
||||
Recurrent
|
||||
Embeddings
|
||||
Normalization
|
||||
Advanced activations
|
||||
Noise
|
||||
|
||||
- Preprocessing
|
||||
Image preprocessing
|
||||
Text preprocessing
|
||||
Sequence preprocessing
|
||||
|
||||
Objectives
|
||||
Optimizers
|
||||
Activations
|
||||
Callbacks
|
||||
Datasets
|
||||
Backend
|
||||
Initializations
|
||||
Regularizers
|
||||
Constraints
|
||||
Visualization
|
||||
Scikit-learn API
|
||||
|
||||
'''
|
||||
from __future__ import print_function
|
||||
from __future__ import unicode_literals
|
||||
|
||||
import re
|
||||
import inspect
|
||||
import os
|
||||
import shutil
|
||||
import sys
|
||||
if sys.version[0] == '2':
|
||||
reload(sys)
|
||||
sys.setdefaultencoding('utf8')
|
||||
|
||||
from keras.layers import convolutional
|
||||
from keras.layers import recurrent
|
||||
@@ -11,35 +70,155 @@ from keras.layers import core
|
||||
from keras.layers import noise
|
||||
from keras.layers import normalization
|
||||
from keras.layers import advanced_activations
|
||||
from keras.layers import containers
|
||||
from keras.layers import embeddings
|
||||
from keras.layers import wrappers
|
||||
from keras import optimizers
|
||||
from keras import callbacks
|
||||
from keras import models
|
||||
from keras.engine import topology
|
||||
from keras import objectives
|
||||
from keras import backend
|
||||
from keras import constraints
|
||||
from keras import activations
|
||||
from keras import regularizers
|
||||
|
||||
MODULES = [(convolutional, 'keras.layers.convolutional'),
|
||||
(recurrent, 'keras.layers.recurrent'),
|
||||
(noise, 'keras.layers.noise'),
|
||||
(normalization, 'keras.layers.normalization'),
|
||||
(advanced_activations, 'keras.layers.advanced_activations'),
|
||||
(containers, 'keras.layers.containers'),
|
||||
(core, 'keras.layers.core'),
|
||||
(embeddings, 'keras.layers.embeddings'),
|
||||
(optimizers, 'keras.optimizers'),
|
||||
(callbacks, 'keras.callbacks'),
|
||||
(models, 'keras.models')]
|
||||
|
||||
SKIP = ['build', 'get_params', 'MaskedLayer',
|
||||
'SiameseHead', 'MaskedLambda',
|
||||
'CallbackList']
|
||||
ROOT = 'http://keras.io/'
|
||||
INCLUDE_METHODS_FOR = [
|
||||
'Layer',
|
||||
'Graph',
|
||||
'Sequential',
|
||||
'Callback',
|
||||
EXCLUDE = {
|
||||
'Optimizer',
|
||||
'Wrapper',
|
||||
'get_session',
|
||||
'set_session',
|
||||
'CallbackList',
|
||||
}
|
||||
|
||||
PAGES = [
|
||||
{
|
||||
'page': 'models/sequential.md',
|
||||
'functions': [
|
||||
models.Sequential.compile,
|
||||
models.Sequential.fit,
|
||||
models.Sequential.evaluate,
|
||||
models.Sequential.predict,
|
||||
models.Sequential.predict_classes,
|
||||
models.Sequential.predict_proba,
|
||||
models.Sequential.train_on_batch,
|
||||
models.Sequential.test_on_batch,
|
||||
models.Sequential.predict_on_batch,
|
||||
models.Sequential.fit_generator,
|
||||
models.Sequential.evaluate_generator,
|
||||
],
|
||||
},
|
||||
{
|
||||
'page': 'models/model.md',
|
||||
'functions': [
|
||||
models.Model.compile,
|
||||
models.Model.fit,
|
||||
models.Model.evaluate,
|
||||
models.Model.predict,
|
||||
models.Model.train_on_batch,
|
||||
models.Model.test_on_batch,
|
||||
models.Model.predict_on_batch,
|
||||
models.Model.fit_generator,
|
||||
models.Model.evaluate_generator,
|
||||
models.Model.get_layer,
|
||||
]
|
||||
},
|
||||
{
|
||||
'page': 'layers/core.md',
|
||||
'classes': [
|
||||
core.Dense,
|
||||
core.Activation,
|
||||
core.Dropout,
|
||||
core.Flatten,
|
||||
core.Reshape,
|
||||
core.Permute,
|
||||
core.RepeatVector,
|
||||
topology.Merge,
|
||||
core.Lambda,
|
||||
core.ActivityRegularization,
|
||||
core.Masking,
|
||||
core.Highway,
|
||||
core.MaxoutDense,
|
||||
core.TimeDistributedDense,
|
||||
],
|
||||
},
|
||||
{
|
||||
'page': 'layers/convolutional.md',
|
||||
'classes': [
|
||||
convolutional.Convolution1D,
|
||||
convolutional.Convolution2D,
|
||||
convolutional.AtrousConv2D,
|
||||
convolutional.Convolution3D,
|
||||
convolutional.UpSampling1D,
|
||||
convolutional.UpSampling2D,
|
||||
convolutional.UpSampling3D,
|
||||
convolutional.ZeroPadding1D,
|
||||
convolutional.ZeroPadding2D,
|
||||
convolutional.ZeroPadding3D,
|
||||
],
|
||||
},
|
||||
{
|
||||
'page': 'layers/pooling.md',
|
||||
'classes': [
|
||||
convolutional.MaxPooling1D,
|
||||
convolutional.MaxPooling2D,
|
||||
convolutional.MaxPooling3D,
|
||||
convolutional.AveragePooling1D,
|
||||
convolutional.AveragePooling2D,
|
||||
convolutional.AveragePooling3D,
|
||||
],
|
||||
},
|
||||
{
|
||||
'page': 'layers/recurrent.md',
|
||||
'classes': [
|
||||
recurrent.Recurrent,
|
||||
recurrent.SimpleRNN,
|
||||
recurrent.GRU,
|
||||
recurrent.LSTM,
|
||||
],
|
||||
},
|
||||
{
|
||||
'page': 'layers/embeddings.md',
|
||||
'classes': [
|
||||
embeddings.Embedding,
|
||||
],
|
||||
},
|
||||
{
|
||||
'page': 'layers/normalization.md',
|
||||
'classes': [
|
||||
normalization.BatchNormalization,
|
||||
],
|
||||
},
|
||||
{
|
||||
'page': 'layers/advanced-activations.md',
|
||||
'all_module_classes': [advanced_activations],
|
||||
},
|
||||
{
|
||||
'page': 'layers/noise.md',
|
||||
'all_module_classes': [noise],
|
||||
},
|
||||
{
|
||||
'page': 'layers/wrappers.md',
|
||||
'all_module_classes': [wrappers],
|
||||
},
|
||||
|
||||
|
||||
{
|
||||
'page': 'optimizers.md',
|
||||
'all_module_classes': [optimizers],
|
||||
},
|
||||
{
|
||||
'page': 'callbacks.md',
|
||||
'all_module_classes': [callbacks],
|
||||
},
|
||||
{
|
||||
'page': 'backend.md',
|
||||
'all_module_functions': [backend],
|
||||
},
|
||||
]
|
||||
|
||||
ROOT = 'http://keras.io/'
|
||||
|
||||
|
||||
def get_earliest_class_that_defined_member(member, cls):
|
||||
ancestors = get_classes_ancestors([cls])
|
||||
@@ -67,23 +246,24 @@ def get_classes_ancestors(classes):
|
||||
return filtered_ancestors
|
||||
|
||||
|
||||
def get_method_signature(method):
|
||||
signature = inspect.getargspec(method)
|
||||
def get_function_signature(function, method=True):
|
||||
signature = inspect.getargspec(function)
|
||||
defaults = signature.defaults
|
||||
args = signature.args[1:]
|
||||
if method:
|
||||
args = signature.args[1:]
|
||||
else:
|
||||
args = signature.args
|
||||
if defaults:
|
||||
kwargs = zip(args[-len(defaults):], defaults)
|
||||
args = args[:-len(defaults)]
|
||||
else:
|
||||
kwargs = []
|
||||
st = '%s.%s(' % (method.__module__, method.__name__)
|
||||
st = '%s.%s(' % (function.__module__, function.__name__)
|
||||
for a in args:
|
||||
st += str(a) + ', '
|
||||
for a, v in kwargs:
|
||||
if type(v) == str:
|
||||
v = '\'' + v + '\''
|
||||
elif type(v) == unicode:
|
||||
v = 'u\'' + v + '\''
|
||||
st += str(a) + '=' + str(v) + ', '
|
||||
if kwargs or args:
|
||||
return st[:-2] + ')'
|
||||
@@ -91,6 +271,17 @@ def get_method_signature(method):
|
||||
return st + ')'
|
||||
|
||||
|
||||
def get_class_signature(cls):
|
||||
try:
|
||||
class_signature = get_function_signature(cls.__init__)
|
||||
class_signature = class_signature.replace('__init__', cls.__name__)
|
||||
except:
|
||||
# in case the class inherits from object and does not
|
||||
# define __init__
|
||||
class_signature = cls.__module__ + '.' + cls.__name__ + '()'
|
||||
return class_signature
|
||||
|
||||
|
||||
def class_to_docs_link(cls):
|
||||
module_name = cls.__module__
|
||||
assert module_name[:6] == 'keras.'
|
||||
@@ -131,7 +322,10 @@ def process_class_docstring(docstring):
|
||||
return docstring
|
||||
|
||||
|
||||
def process_method_docstring(docstring):
|
||||
def process_function_docstring(docstring):
|
||||
docstring = re.sub(r'\n # (.*)\n',
|
||||
r'\n __\1__\n\n',
|
||||
docstring)
|
||||
docstring = re.sub(r'\n # (.*)\n',
|
||||
r'\n __\1__\n\n',
|
||||
docstring)
|
||||
@@ -148,6 +342,7 @@ def process_method_docstring(docstring):
|
||||
print('Cleaning up existing sources directory.')
|
||||
if os.path.exists('sources'):
|
||||
shutil.rmtree('sources')
|
||||
|
||||
print('Populating sources directory with templates.')
|
||||
for subdir, dirs, fnames in os.walk('templates'):
|
||||
for fname in fnames:
|
||||
@@ -160,101 +355,75 @@ for subdir, dirs, fnames in os.walk('templates'):
|
||||
shutil.copy(fpath, new_fpath)
|
||||
|
||||
print('Starting autogeneration.')
|
||||
covered_so_far = set()
|
||||
for module, module_name in MODULES:
|
||||
class_pages = []
|
||||
for name in dir(module):
|
||||
if name in SKIP:
|
||||
continue
|
||||
if name[0] == '_':
|
||||
continue
|
||||
module_member = getattr(module, name)
|
||||
if module_member in covered_so_far:
|
||||
continue
|
||||
if inspect.isclass(module_member):
|
||||
cls = module_member
|
||||
if cls.__module__ == module_name:
|
||||
for page_data in PAGES:
|
||||
blocks = []
|
||||
classes = page_data.get('classes', [])
|
||||
for module in page_data.get('all_module_classes', []):
|
||||
module_classes = []
|
||||
for name in dir(module):
|
||||
if name[0] == '_' or name in EXCLUDE:
|
||||
continue
|
||||
module_member = getattr(module, name)
|
||||
if inspect.isclass(module_member):
|
||||
cls = module_member
|
||||
if cls.__module__ == module.__name__:
|
||||
if cls not in module_classes:
|
||||
module_classes.append(cls)
|
||||
module_classes.sort(key=lambda x: id(x))
|
||||
classes += module_classes
|
||||
|
||||
try:
|
||||
class_signature = get_method_signature(cls.__init__)
|
||||
class_signature = class_signature.replace('__init__', cls.__name__)
|
||||
except:
|
||||
# in case the class inherits from object and does not
|
||||
# define __init__
|
||||
class_signature = module_name + '.' + cls.__name__ + '()'
|
||||
for cls in classes:
|
||||
subblocks = []
|
||||
signature = get_class_signature(cls)
|
||||
subblocks.append('<span style="float:right;">' + class_to_source_link(cls) + '</span>')
|
||||
subblocks.append('### ' + cls.__name__ + '\n')
|
||||
subblocks.append(code_snippet(signature))
|
||||
docstring = cls.__doc__
|
||||
if docstring:
|
||||
subblocks.append(process_class_docstring(docstring))
|
||||
blocks.append('\n'.join(subblocks))
|
||||
|
||||
methods = []
|
||||
methods_not_defined_here = []
|
||||
for name in dir(cls):
|
||||
if name in SKIP:
|
||||
continue
|
||||
if name[0] == '_':
|
||||
continue
|
||||
cls_member = getattr(cls, name)
|
||||
if inspect.ismethod(cls_member):
|
||||
method = cls_member
|
||||
signature = inspect.getargspec(method)
|
||||
defaults = signature.defaults
|
||||
args = signature.args[1:]
|
||||
if defaults:
|
||||
kwargs = zip(args[-len(defaults):], defaults)
|
||||
args = args[:-len(defaults)]
|
||||
else:
|
||||
kwargs = []
|
||||
functions = page_data.get('functions', [])
|
||||
for module in page_data.get('all_module_functions', []):
|
||||
module_functions = []
|
||||
for name in dir(module):
|
||||
if name[0] == '_' or name in EXCLUDE:
|
||||
continue
|
||||
module_member = getattr(module, name)
|
||||
if inspect.isfunction(module_member):
|
||||
function = module_member
|
||||
if module.__name__ in function.__module__:
|
||||
if function not in module_functions:
|
||||
module_functions.append(function)
|
||||
module_functions.sort(key=lambda x: id(x))
|
||||
functions += module_functions
|
||||
|
||||
defined_by = get_earliest_class_that_defined_member(method.__name__, cls)
|
||||
if cls == defined_by:
|
||||
methods.append(method)
|
||||
else:
|
||||
methods_not_defined_here.append((method, defined_by))
|
||||
|
||||
blocks = []
|
||||
blocks.append('<span style="float:right;">' + class_to_source_link(cls) + '</span>')
|
||||
blocks.append('# ' + cls.__name__ + '\n')
|
||||
blocks.append(code_snippet(class_signature))
|
||||
docstring = cls.__doc__
|
||||
if docstring:
|
||||
blocks.append(process_class_docstring(docstring))
|
||||
|
||||
if cls.__name__ in INCLUDE_METHODS_FOR:
|
||||
if methods or methods_not_defined_here:
|
||||
blocks.append('### Methods\n')
|
||||
for method in methods:
|
||||
signature = get_method_signature(method)
|
||||
signature = signature.replace(module_name + '.', '')
|
||||
blocks.append(code_snippet(signature))
|
||||
docstring = method.__doc__
|
||||
if docstring:
|
||||
blocks.append(process_method_docstring(docstring))
|
||||
for method, defined_by in methods_not_defined_here:
|
||||
signature = get_method_signature(method)
|
||||
method_module_name = method.__module__
|
||||
signature = signature.replace(method_module_name + '.', '')
|
||||
link = '[' + defined_by.__name__ + '](' + class_to_docs_link(defined_by) + ')'
|
||||
blocks.append(code_snippet(signature))
|
||||
blocks.append('Defined by ' + link + '.\n')
|
||||
|
||||
mkdown = '\n'.join(blocks)
|
||||
class_pages.append((id(cls), mkdown))
|
||||
covered_so_far.add(module_member)
|
||||
|
||||
class_pages.sort(key=lambda x: x[0])
|
||||
class_pages = [x[1] for x in class_pages]
|
||||
module_page = '\n----\n\n'.join(class_pages)
|
||||
for function in functions:
|
||||
subblocks = []
|
||||
signature = get_function_signature(function, method=False)
|
||||
signature = signature.replace(function.__module__ + '.', '')
|
||||
subblocks.append('### ' + function.__name__ + '\n')
|
||||
subblocks.append(code_snippet(signature))
|
||||
docstring = function.__doc__
|
||||
if docstring:
|
||||
subblocks.append(process_function_docstring(docstring))
|
||||
blocks.append('\n\n'.join(subblocks))
|
||||
|
||||
mkdown = '\n----\n\n'.join(blocks)
|
||||
# save module page.
|
||||
# Either insert content into existing page,
|
||||
# or create page otherwise
|
||||
path = 'sources/' + module_name.replace('.', '/')[6:] + '.md'
|
||||
page_name = page_data['page']
|
||||
path = os.path.join('sources', page_name)
|
||||
if os.path.exists(path):
|
||||
template = open(path).read()
|
||||
assert '{{autogenerated}}' in template, ('Template found for ' + path +
|
||||
' but missing {{autogenerated}} tag.')
|
||||
module_page = template.replace('{{autogenerated}}', module_page)
|
||||
mkdown = template.replace('{{autogenerated}}', mkdown)
|
||||
print('...inserting autogenerated content into template:', path)
|
||||
else:
|
||||
print('...creating new page with autogenerated content:', path)
|
||||
subdir = os.path.dirname(path)
|
||||
if not os.path.exists(subdir):
|
||||
os.makedirs(subdir)
|
||||
open(path, 'w').write(module_page)
|
||||
open(path, 'w').write(mkdown)
|
||||
|
||||
+30
-19
@@ -3,8 +3,8 @@ theme: readthedocs
|
||||
docs_dir: sources
|
||||
repo_url: http://github.com/fchollet/keras
|
||||
site_url: http://keras.io/
|
||||
#theme_dir: theme
|
||||
site_description: Documentation for fast and lightweight Keras Deep Learning library.
|
||||
# theme_dir: theme
|
||||
site_description: 'Documentation for Keras, the Python Deep Learning library.'
|
||||
|
||||
dev_addr: '0.0.0.0:8000'
|
||||
google_analytics: ['UA-61785484-1', 'keras.io']
|
||||
@@ -12,31 +12,42 @@ google_analytics: ['UA-61785484-1', 'keras.io']
|
||||
|
||||
pages:
|
||||
- Home: index.md
|
||||
- Index: documentation.md
|
||||
- Examples: examples.md
|
||||
- FAQ: faq.md
|
||||
- Backends: backend.md
|
||||
- Optimizers: optimizers.md
|
||||
- Objectives: objectives.md
|
||||
- Models: models.md
|
||||
- Activations: activations.md
|
||||
- Initializations: initializations.md
|
||||
- Regularizers: regularizers.md
|
||||
- Constraints: constraints.md
|
||||
- Callbacks: callbacks.md
|
||||
- Datasets: datasets.md
|
||||
- Visualization: visualization.md
|
||||
- Getting started:
|
||||
- Guide to the Sequential model: getting-started/sequential-model-guide.md
|
||||
- Guide to the Functional API: getting-started/functional-api-guide.md
|
||||
- FAQ: getting-started/faq.md
|
||||
- Models:
|
||||
- About Keras models: models/about-keras-models.md
|
||||
- Sequential: models/sequential.md
|
||||
- Model (functional API): models/model.md
|
||||
- Layers:
|
||||
- About Keras layers: layers/about-keras-layers.md
|
||||
- Core Layers: layers/core.md
|
||||
- Convolutional Layers: layers/convolutional.md
|
||||
- Pooling Layers: layers/pooling.md
|
||||
- Recurrent Layers: layers/recurrent.md
|
||||
- Advanced Activations Layers: layers/advanced_activations.md
|
||||
- Normalization Layers: layers/normalization.md
|
||||
- Embedding Layers: layers/embeddings.md
|
||||
- Advanced Activations Layers: layers/advanced-activations.md
|
||||
- Normalization Layers: layers/normalization.md
|
||||
- Noise layers: layers/noise.md
|
||||
- Containers: layers/containers.md
|
||||
- Layer wrappers: layers/wrappers.md
|
||||
- Writing your own Keras layers: layers/writing-your-own-keras-layers.md
|
||||
- Preprocessing:
|
||||
- Sequence Preprocessing: preprocessing/sequence.md
|
||||
- Text Preprocessing: preprocessing/text.md
|
||||
- Image Preprocessing: preprocessing/image.md
|
||||
- Objectives: objectives.md
|
||||
- Optimizers: optimizers.md
|
||||
- Activations: activations.md
|
||||
- Callbacks: callbacks.md
|
||||
- Datasets: datasets.md
|
||||
- Backend: backend.md
|
||||
- Initializations: initializations.md
|
||||
- Regularizers: regularizers.md
|
||||
- Constraints: constraints.md
|
||||
- Visualization: visualization.md
|
||||
- Scikit-learn API: scikit-learn-api.md
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
externo
+2
-1
@@ -30,6 +30,7 @@ model.add(Activation(tanh))
|
||||
|
||||
- __softmax__: Softmax applied across inputs last dimension. Expects shape either `(nb_samples, nb_timesteps, nb_dims)` or `(nb_samples, nb_dims)`.
|
||||
- __softplus__
|
||||
- __softsign__
|
||||
- __relu__
|
||||
- __tanh__
|
||||
- __sigmoid__
|
||||
@@ -38,4 +39,4 @@ model.add(Activation(tanh))
|
||||
|
||||
## On Advanced Activations
|
||||
|
||||
Activations that are more complex than a simple Theano/TensorFlow function (eg. learnable activations, configurable activations, etc.) are available as [Advanced Activation layers](layers/advanced_activations.md), and can be found in the module `keras.layers.advanced_activations`. These include PReLU and LeakyReLU.
|
||||
Activations that are more complex than a simple Theano/TensorFlow function (eg. learnable activations, configurable activations, etc.) are available as [Advanced Activation layers](layers/advanced-activations.md), and can be found in the module `keras.layers.advanced_activations`. These include PReLU and LeakyReLU.
|
||||
|
||||
externo
+11
-3
@@ -9,6 +9,8 @@ At this time, Keras has two backend implementations available: the **Theano** ba
|
||||
- [Theano](http://deeplearning.net/software/theano/) is an open-source symbolic tensor manipulation framework developed by LISA/MILA Lab at Université de Montréal.
|
||||
- [TensorFlow](http://www.tensorflow.org/) is an open-source symbolic tensor manipulation framework developed by Google, Inc.
|
||||
|
||||
----
|
||||
|
||||
## Switching from one backend to another
|
||||
|
||||
If you have run Keras at least once, you will find the Keras configuration file at:
|
||||
@@ -27,11 +29,13 @@ You can also define the environment variable ``KERAS_BACKEND`` and this will
|
||||
override what is defined in your config file :
|
||||
|
||||
```bash
|
||||
KERAS_BACKEND=tensorflow python -c "from keras import backend; print backend._BACKEND"
|
||||
KERAS_BACKEND=tensorflow python -c "from keras import backend; print(backend._BACKEND)"
|
||||
Using TensorFlow backend.
|
||||
tensorflow
|
||||
```
|
||||
|
||||
----
|
||||
|
||||
## Using the abstract Keras backend to write new code
|
||||
|
||||
If you want the Keras modules you write to be compatible with both Theano and TensorFlow, you have to write them via the abstract Keras backend API. Here's an intro.
|
||||
@@ -74,8 +78,12 @@ a = concatenate([b, c], axis=-1)
|
||||
# etc...
|
||||
```
|
||||
|
||||
For more information, see the code at `keras/backend/theano_backend.py` and `keras/backend/tensorflow_backend.py`.
|
||||
|
||||
----
|
||||
|
||||
## Backend functions
|
||||
|
||||
|
||||
{{autogenerated}}
|
||||
|
||||
|
||||
|
||||
|
||||
externo
+20
-14
@@ -2,13 +2,13 @@
|
||||
|
||||
## CIFAR10 small image classification
|
||||
|
||||
`keras.datasets.cifar10`
|
||||
|
||||
Dataset of 50,000 32x32 color training images, labeled over 10 categories, and 10,000 test images.
|
||||
|
||||
### Usage:
|
||||
|
||||
```python
|
||||
from keras.datasets import cifar10
|
||||
|
||||
(X_train, y_train), (X_test, y_test) = cifar10.load_data()
|
||||
```
|
||||
|
||||
@@ -21,13 +21,13 @@ Dataset of 50,000 32x32 color training images, labeled over 10 categories, and 1
|
||||
|
||||
## CIFAR100 small image classification
|
||||
|
||||
`keras.datasets.cifar100`
|
||||
|
||||
Dataset of 50,000 32x32 color training images, labeled over 100 categories, and 10,000 test images.
|
||||
|
||||
### Usage:
|
||||
|
||||
```python
|
||||
from keras.datasets import cifar100
|
||||
|
||||
(X_train, y_train), (X_test, y_test) = cifar100.load_data(label_mode='fine')
|
||||
```
|
||||
|
||||
@@ -44,8 +44,6 @@ Dataset of 50,000 32x32 color training images, labeled over 100 categories, and
|
||||
|
||||
## IMDB Movie reviews sentiment classification
|
||||
|
||||
`keras.datasets.imdb`
|
||||
|
||||
Dataset of 25,000 movies reviews from IMDB, labeled by sentiment (positive/negative). Reviews have been preprocessed, and each review is encoded as a [sequence](preprocessing/sequence.md) of word indexes (integers). For convenience, words are indexed by overall frequency in the dataset, so that for instance the integer "3" encodes the 3rd most frequent word in the data. This allows for quick filtering operations such as: "only consider the top 10,000 most common words, but eliminate the top 20 most common words".
|
||||
|
||||
As a convention, "0" does not stand for a specific word, but instead is used to encode any unknown word.
|
||||
@@ -53,8 +51,13 @@ As a convention, "0" does not stand for a specific word, but instead is used to
|
||||
### Usage:
|
||||
|
||||
```python
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(path="imdb.pkl", \
|
||||
nb_words=None, skip_top=0, maxlen=None, test_split=0.1, seed=113)
|
||||
from keras.datasets import imdb
|
||||
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(path="imdb.pkl",
|
||||
nb_words=None,
|
||||
skip_top=0,
|
||||
maxlen=None,
|
||||
test_split=0.1)
|
||||
```
|
||||
- __Return:__
|
||||
- 2 tuples:
|
||||
@@ -74,15 +77,18 @@ nb_words=None, skip_top=0, maxlen=None, test_split=0.1, seed=113)
|
||||
|
||||
## Reuters newswire topics classification
|
||||
|
||||
`keras.datasets.reuters`
|
||||
|
||||
Dataset of 11,228 newswires from Reuters, labeled over 46 topics. As with the IMDB dataset, each wire is encoded as a sequence of word indexes (same conventions).
|
||||
|
||||
### Usage:
|
||||
|
||||
```python
|
||||
(X_train, y_train), (X_test, y_test) = reuters.load_data(path="reuters.pkl", \
|
||||
nb_words=None, skip_top=0, maxlen=None, test_split=0.1, seed=113)
|
||||
from keras.datasets import reuters
|
||||
|
||||
(X_train, y_train), (X_test, y_test) = reuters.load_data(path="reuters.pkl",
|
||||
nb_words=None,
|
||||
skip_top=0,
|
||||
maxlen=None,
|
||||
test_split=0.1)
|
||||
```
|
||||
|
||||
The specifications are the same as that of the IMDB dataset.
|
||||
@@ -101,13 +107,13 @@ word_index = reuters.get_word_index(path="reuters_word_index.pkl")
|
||||
|
||||
## MNIST database of handwritten digits
|
||||
|
||||
`keras.datasets.mnist`
|
||||
|
||||
Dataset of 60,000 28x28 grayscale images of the 10 digits, along with a test set of 10,000 images.
|
||||
|
||||
### Usage:
|
||||
|
||||
```python
|
||||
from keras.datasets import mnist
|
||||
|
||||
(X_train, y_train), (X_test, y_test) = mnist.load_data()
|
||||
```
|
||||
|
||||
|
||||
externo
-40
@@ -1,40 +0,0 @@
|
||||
# Keras Documentation Index
|
||||
|
||||
## Introduction
|
||||
|
||||
- [Home](index.md)
|
||||
- [Index](documentation.md)
|
||||
- [Examples](examples.md)
|
||||
- [FAQ](faq.md)
|
||||
- [Backend](backend.md)
|
||||
|
||||
---
|
||||
|
||||
## Base functionality
|
||||
|
||||
- [Optimizers](optimizers.md)
|
||||
- [Objectives](objectives.md)
|
||||
- [Models](models.md)
|
||||
- [Activations](activations.md)
|
||||
- [Initializations](initializations.md)
|
||||
- [Regularizers](regularizers.md)
|
||||
- [Constraints](constraints.md)
|
||||
- [Callbacks](callbacks.md)
|
||||
- [Datasets](datasets.md)
|
||||
|
||||
---
|
||||
|
||||
## Layers
|
||||
- [Core](layers/core.md)
|
||||
- [Convolutional](layers/convolutional.md)
|
||||
- [Recurrent](layers/recurrent.md)
|
||||
- [Advanced Activations](layers/advanced_activations.md)
|
||||
- [Normalization](layers/normalization.md)
|
||||
- [Embeddings](layers/embeddings.md)
|
||||
|
||||
---
|
||||
|
||||
## Preprocessing
|
||||
- [Sequence](preprocessing/sequence.md)
|
||||
- [Text](preprocessing/text.md)
|
||||
- [Image](preprocessing/image.md)
|
||||
externo
-244
@@ -1,244 +0,0 @@
|
||||
# Keras FAQ: Frequently Asked Keras Questions
|
||||
|
||||
[How should I cite Keras?](#how-should-i-cite-keras)
|
||||
|
||||
[How can I run Keras on GPU?](#how-can-i-run-keras-on-gpu)
|
||||
|
||||
[How can I save a Keras model?](#how-can-i-save-a-keras-model)
|
||||
|
||||
[Why is the training loss much higher than the testing loss?](#why-is-the-training-loss-much-higher-than-the-testing-loss)
|
||||
|
||||
[How can I visualize the output of an intermediate layer?](#how-can-i-visualize-the-output-of-an-intermediate-layer)
|
||||
|
||||
[How can I use Keras with datasets that don't fit in memory?](#how-can-i-use-keras-with-datasets-that-dont-fit-in-memory)
|
||||
|
||||
[How can I interrupt training when the validation loss isn't decreasing anymore?](#how-can-i-interrupt-training-when-the-validation-loss-isnt-decreasing-anymore)
|
||||
|
||||
[How is the validation split computed?](#how-is-the-validation-split-computed)
|
||||
|
||||
[Is the data shuffled during training?](#is-the-data-shuffled-during-training)
|
||||
|
||||
[How can I record the training / validation loss / accuracy at each epoch?](#how-can-i-record-the-training-validation-loss-accuracy-at-each-epoch)
|
||||
|
||||
[How can I use stateful RNNs?](#how-can-i-use-stateful-rnns)
|
||||
|
||||
---
|
||||
|
||||
### How should I cite Keras?
|
||||
|
||||
Please cite Keras in your publications if it helps your research. Here is an example BibTeX entry:
|
||||
|
||||
```
|
||||
@misc{chollet2015keras,
|
||||
author = {Chollet, François},
|
||||
title = {Keras},
|
||||
year = {2015},
|
||||
publisher = {GitHub},
|
||||
journal = {GitHub repository},
|
||||
howpublished = {\url{https://github.com/fchollet/keras}}
|
||||
}
|
||||
```
|
||||
|
||||
### How can I run Keras on GPU?
|
||||
|
||||
If you are running on the TensorFlow backend, your code will automatically run on GPU if any available GPU is detected.
|
||||
If you are running on the Theano backend, you can use one of the following methods:
|
||||
|
||||
Method 1: use Theano flags.
|
||||
```bash
|
||||
THEANO_FLAGS=device=gpu,floatX=float32 python my_keras_script.py
|
||||
```
|
||||
|
||||
The name 'gpu' might have to be changed depending on your device's identifier (e.g. `gpu0`, `gpu1`, etc).
|
||||
|
||||
Method 2: set up your `.theanorc`: [Instructions](http://deeplearning.net/software/theano/library/config.html)
|
||||
|
||||
Method 3: manually set `theano.config.device`, `theano.config.floatX` at the beginning of your code:
|
||||
```python
|
||||
import theano
|
||||
theano.config.device = 'gpu'
|
||||
theano.config.floatX = 'float32'
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### How can I save a Keras model?
|
||||
|
||||
*It is not recommended to use pickle or cPickle to save a Keras model.*
|
||||
|
||||
If you only need to save the architecture of a model, and not its weights, you can do:
|
||||
|
||||
```python
|
||||
# save as JSON
|
||||
json_string = model.to_json()
|
||||
|
||||
# save as YAML
|
||||
yaml_string = model.to_yaml()
|
||||
```
|
||||
|
||||
You can then build a fresh model from this data:
|
||||
|
||||
```python
|
||||
# model reconstruction from JSON:
|
||||
from keras.models import model_from_json
|
||||
model = model_from_json(json_string)
|
||||
|
||||
# model reconstruction from YAML
|
||||
model = model_from_yaml(yaml_string)
|
||||
```
|
||||
|
||||
If you need to save the weights of a model, you can do so in HDF5 with the code below.
|
||||
|
||||
Note that you will first need to install HDF5 and the Python library h5py, which do not come bundled with Keras.
|
||||
|
||||
```python
|
||||
model.save_weights('my_model_weights.h5')
|
||||
```
|
||||
|
||||
Assuming you have code for instantiating your model, you can then load the weights you saved into a model with the same architecture:
|
||||
|
||||
```python
|
||||
model.load_weights('my_model_weights.h5')
|
||||
```
|
||||
|
||||
This leads us to a way to save and reconstruct models from only serialized data:
|
||||
```python
|
||||
json_string = model.to_json()
|
||||
open('my_model_architecture.json', 'w').write(json_string)
|
||||
model.save_weights('my_model_weights.h5')
|
||||
|
||||
# elsewhere...
|
||||
model = model_from_json(open('my_model_architecture.json').read())
|
||||
model.load_weights('my_model_weights.h5')
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### Why is the training loss much higher than the testing loss?
|
||||
|
||||
A Keras model has two modes: training and testing. Regularization mechanisms, such as Dropout and L1/L2 weight regularization, are turned off at testing time.
|
||||
|
||||
Besides, the training loss is the average of the losses over each batch of training data. Because your model is changing over time, the loss over the first batches of an epoch is generally higher than over the last batches. On the other hand, the testing loss for an epoch is computed using the model as it is at the end of the epoch, resulting in a lower loss.
|
||||
|
||||
---
|
||||
|
||||
### How can I visualize the output of an intermediate layer?
|
||||
|
||||
You can build a Keras function that will return the output of a certain layer given a certain input, for example:
|
||||
|
||||
```python
|
||||
from keras import backend as K
|
||||
|
||||
# with a Sequential model
|
||||
get_3rd_layer_output = K.function([model.layers[0].input],
|
||||
[model.layers[3].get_output(train=False)])
|
||||
layer_output = get_3rd_layer_output([X])[0]
|
||||
|
||||
# with a Graph model
|
||||
get_conv_layer_output = K.function([model.inputs[i].input for i in model.input_order],
|
||||
[model.nodes['conv'].get_output(train=False)])
|
||||
conv_output = get_conv_layer_output([input_data_dict[i] for i in model.input_order])[0]
|
||||
```
|
||||
|
||||
Similarly, you could build a Theano and TensorFlow function directly.
|
||||
|
||||
---
|
||||
|
||||
### How can I use Keras with datasets that don't fit in memory?
|
||||
|
||||
You can do batch training using `model.train_on_batch(X, y)` and `model.test_on_batch(X, y)`. See the [models documentation](models.md).
|
||||
|
||||
Alternatively, you can write a generator that yields batches of training data and use the method `model.fit_generator(data_generator, samples_per_epoch, nb_epoch)`.
|
||||
|
||||
You can see batch training in action in our [CIFAR10 example](https://github.com/fchollet/keras/blob/master/examples/cifar10_cnn.py).
|
||||
|
||||
---
|
||||
|
||||
### How can I interrupt training when the validation loss isn't decreasing anymore?
|
||||
|
||||
You can use an `EarlyStopping` callback:
|
||||
|
||||
```python
|
||||
from keras.callbacks import EarlyStopping
|
||||
early_stopping = EarlyStopping(monitor='val_loss', patience=2)
|
||||
model.fit(X, y, validation_split=0.2, callbacks=[early_stopping])
|
||||
```
|
||||
|
||||
Find out more in the [callbacks documentation](callbacks.md).
|
||||
|
||||
---
|
||||
|
||||
### How is the validation split computed?
|
||||
|
||||
If you set the `validation_split` argument in `model.fit` to e.g. 0.1, then the validation data used will be the *last 10%* of the data. If you set it to 0.25, it will be the last 25% of the data, etc.
|
||||
|
||||
|
||||
---
|
||||
|
||||
### Is the data shuffled during training?
|
||||
|
||||
Yes, if the `shuffle` argument in `model.fit` is set to `True` (which is the default), the training data will be randomly shuffled at each epoch.
|
||||
|
||||
Validation data isn't shuffled.
|
||||
|
||||
---
|
||||
|
||||
|
||||
### How can I record the training / validation loss / accuracy at each epoch?
|
||||
|
||||
The `model.fit` method returns an `History` callback, which has a `history` attribute containing the lists of successive losses / accuracies.
|
||||
|
||||
```python
|
||||
hist = model.fit(X, y, validation_split=0.2)
|
||||
print(hist.history)
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### How can I use stateful RNNs?
|
||||
|
||||
Making a RNN stateful means that the states for the samples of each batch will be reused as initial states for the samples in the next batch.
|
||||
|
||||
When using stateful RNNs, it is therefore assumed that:
|
||||
|
||||
- all batches have the same number of samples
|
||||
- If `X1` and `X2` are successive batches of samples, then `X2[i]` is the follow-up sequence to `X1[i]`, for every `i`.
|
||||
|
||||
To use statefulness in RNNs, you need to:
|
||||
|
||||
- explicitly specify the batch size you are using, by passing a `batch_input_shape` argument to the first layer in your model. It should be a tuple of integers, e.g. `(32, 10, 16)` for a 32-samples batch of sequences of 10 timesteps with 16 features per timestep.
|
||||
- set `stateful=True` in your RNN layer(s).
|
||||
|
||||
To reset the states accumulated:
|
||||
|
||||
- use `model.reset_states()` to reset the states of all layers in the model
|
||||
- use `layer.reset_states()` to reset the states of a specific stateful RNN layer
|
||||
|
||||
Example:
|
||||
|
||||
```python
|
||||
|
||||
X # this is our input data, of shape (32, 21, 16)
|
||||
# we will feed it to our model in sequences of length 10
|
||||
|
||||
model = Sequential()
|
||||
model.add(LSTM(32, batch_input_shape=(32, 10, 16), stateful=True))
|
||||
model.add(Dense(16, activation='softmax'))
|
||||
|
||||
model.compile(optimizer='rmsprop', loss='categorical_crossentropy')
|
||||
|
||||
# we train the network to predict the 11th timestep given the first 10:
|
||||
model.train_on_batch(X[:, :10, :], np.reshape(X[:, 10, :], (32, 16)))
|
||||
|
||||
# the state of the network has changed. We can feed the follow-up sequences:
|
||||
model.train_on_batch(X[:, 10:20, :], np.reshape(X[:, 20, :], (32, 16)))
|
||||
|
||||
# let's reset the states of the LSTM layer:
|
||||
model.reset_states()
|
||||
|
||||
# another way to do it in this case:
|
||||
model.layers[0].reset_states()
|
||||
```
|
||||
|
||||
Notes that the methods `predict`, `fit`, `train_on_batch`, `predict_classes`, etc. will *all* update the states of the stateful layers in a model. This allows you to do not only stateful training, but also stateful prediction.
|
||||
|
||||
+344
@@ -0,0 +1,344 @@
|
||||
# Keras FAQ: Frequently Asked Keras Questions
|
||||
|
||||
- [How should I cite Keras?](#how-should-i-cite-keras)
|
||||
- [How can I run Keras on GPU?](#how-can-i-run-keras-on-gpu)
|
||||
- [How can I save a Keras model?](#how-can-i-save-a-keras-model)
|
||||
- [Why is the training loss much higher than the testing loss?](#why-is-the-training-loss-much-higher-than-the-testing-loss)
|
||||
- [How can I visualize the output of an intermediate layer?](#how-can-i-visualize-the-output-of-an-intermediate-layer)
|
||||
- [How can I use Keras with datasets that don't fit in memory?](#how-can-i-use-keras-with-datasets-that-dont-fit-in-memory)
|
||||
- [How can I interrupt training when the validation loss isn't decreasing anymore?](#how-can-i-interrupt-training-when-the-validation-loss-isnt-decreasing-anymore)
|
||||
- [How is the validation split computed?](#how-is-the-validation-split-computed)
|
||||
- [Is the data shuffled during training?](#is-the-data-shuffled-during-training)
|
||||
- [How can I record the training / validation loss / accuracy at each epoch?](#how-can-i-record-the-training-validation-loss-accuracy-at-each-epoch)
|
||||
- [How can I "freeze" layers?](#how-can-i-freeze-keras-layers)
|
||||
- [How can I use stateful RNNs?](#how-can-i-use-stateful-rnns)
|
||||
- [How can I remove a layer from a Sequential model?](#how-can-i-remove-a-layer-from-a-sequential-model)
|
||||
- [How can I use pre-trained models in Keras?](#how-can-i-use-pre-trained-models-in-keras)
|
||||
|
||||
---
|
||||
|
||||
### How should I cite Keras?
|
||||
|
||||
Please cite Keras in your publications if it helps your research. Here is an example BibTeX entry:
|
||||
|
||||
```
|
||||
@misc{chollet2015keras,
|
||||
title={Keras},
|
||||
author={Chollet, Fran\c{c}ois},
|
||||
year={2015},
|
||||
publisher={GitHub},
|
||||
howpublished={\url{https://github.com/fchollet/keras}},
|
||||
}
|
||||
```
|
||||
|
||||
### How can I run Keras on GPU?
|
||||
|
||||
If you are running on the TensorFlow backend, your code will automatically run on GPU if any available GPU is detected.
|
||||
If you are running on the Theano backend, you can use one of the following methods:
|
||||
|
||||
Method 1: use Theano flags.
|
||||
```bash
|
||||
THEANO_FLAGS=device=gpu,floatX=float32 python my_keras_script.py
|
||||
```
|
||||
|
||||
The name 'gpu' might have to be changed depending on your device's identifier (e.g. `gpu0`, `gpu1`, etc).
|
||||
|
||||
Method 2: set up your `.theanorc`: [Instructions](http://deeplearning.net/software/theano/library/config.html)
|
||||
|
||||
Method 3: manually set `theano.config.device`, `theano.config.floatX` at the beginning of your code:
|
||||
```python
|
||||
import theano
|
||||
theano.config.device = 'gpu'
|
||||
theano.config.floatX = 'float32'
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### How can I save a Keras model?
|
||||
|
||||
*It is not recommended to use pickle or cPickle to save a Keras model.*
|
||||
|
||||
You can use `model.save(filepath)` to save a Keras model into a single HDF5 file which will contain:
|
||||
|
||||
- the architecture of the model, allowing to re-create the model
|
||||
- the weights of the model
|
||||
- the training configuration (loss, optimizer)
|
||||
- the state of the optimizer, allowing to resume training exactly where you left off.
|
||||
|
||||
You can then use `keras.models.load_model(filepath)` to reinstantiate your model.
|
||||
`load_model` will also take care of compiling the model using the saved training configuration
|
||||
(unless the model was never compiled in the first place).
|
||||
|
||||
Example:
|
||||
|
||||
```python
|
||||
from keras.models import load_model
|
||||
|
||||
model.save('my_model.h5') # creates a HDF5 file 'my_model.h5'
|
||||
del model # deletes the existing model
|
||||
|
||||
# returns a compiled model
|
||||
# identical to the previous one
|
||||
model = load_model('my_model.h5')
|
||||
```
|
||||
|
||||
If you only need to save the **architecture of a model**, and not its weights or its training configuration, you can do:
|
||||
|
||||
```python
|
||||
# save as JSON
|
||||
json_string = model.to_json()
|
||||
|
||||
# save as YAML
|
||||
yaml_string = model.to_yaml()
|
||||
```
|
||||
|
||||
The generated JSON / YAML files are human-readable and can be manually edited if needed.
|
||||
|
||||
You can then build a fresh model from this data:
|
||||
|
||||
```python
|
||||
# model reconstruction from JSON:
|
||||
from keras.models import model_from_json
|
||||
model = model_from_json(json_string)
|
||||
|
||||
# model reconstruction from YAML
|
||||
model = model_from_yaml(yaml_string)
|
||||
```
|
||||
|
||||
If you need to save the **weights of a model**, you can do so in HDF5 with the code below.
|
||||
|
||||
Note that you will first need to install HDF5 and the Python library h5py, which do not come bundled with Keras.
|
||||
|
||||
```python
|
||||
model.save_weights('my_model_weights.h5')
|
||||
```
|
||||
|
||||
Assuming you have code for instantiating your model, you can then load the weights you saved into a model with the same architecture:
|
||||
|
||||
```python
|
||||
model.load_weights('my_model_weights.h5')
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### Why is the training loss much higher than the testing loss?
|
||||
|
||||
A Keras model has two modes: training and testing. Regularization mechanisms, such as Dropout and L1/L2 weight regularization, are turned off at testing time.
|
||||
|
||||
Besides, the training loss is the average of the losses over each batch of training data. Because your model is changing over time, the loss over the first batches of an epoch is generally higher than over the last batches. On the other hand, the testing loss for an epoch is computed using the model as it is at the end of the epoch, resulting in a lower loss.
|
||||
|
||||
---
|
||||
|
||||
### How can I visualize the output of an intermediate layer?
|
||||
|
||||
You can build a Keras function that will return the output of a certain layer given a certain input, for example:
|
||||
|
||||
```python
|
||||
from keras import backend as K
|
||||
|
||||
# with a Sequential model
|
||||
get_3rd_layer_output = K.function([model.layers[0].input],
|
||||
[model.layers[3].output])
|
||||
layer_output = get_3rd_layer_output([X])[0]
|
||||
```
|
||||
|
||||
Similarly, you could build a Theano and TensorFlow function directly.
|
||||
|
||||
Note that if your model has a different behavior in training and testing phase (e.g. if it uses `Dropout`, `BatchNormalization`, etc.), you will need
|
||||
to pass the learning phase flag to your function:
|
||||
|
||||
```python
|
||||
get_3rd_layer_output = K.function([model.layers[0].input, K.learning_phase()],
|
||||
[model.layers[3].output])
|
||||
|
||||
# output in test mode = 0
|
||||
layer_output = get_3rd_layer_output([X, 0])[0]
|
||||
|
||||
# output in train mode = 1
|
||||
layer_output = get_3rd_layer_output([X, 1])[0]
|
||||
```
|
||||
|
||||
Another more flexible way of getting output from intermediate layers is to use the [functional API](/getting-started/functional-api-guide). For example, if you have created an autoencoder for MNIST:
|
||||
|
||||
```python
|
||||
inputs = Input(shape=(784,))
|
||||
encoded = Dense(32, activation='relu')(inputs)
|
||||
decoded = Dense(784)(encoded)
|
||||
model = Model(input=inputs, output=decoded)
|
||||
```
|
||||
|
||||
After compiling and training the model, you can get the output of the data from the encoder like this:
|
||||
|
||||
```python
|
||||
encoder = Model(input=inputs, output=encoded)
|
||||
X_encoded = encoder.predict(X)
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### How can I use Keras with datasets that don't fit in memory?
|
||||
|
||||
You can do batch training using `model.train_on_batch(X, y)` and `model.test_on_batch(X, y)`. See the [models documentation](/models/sequential).
|
||||
|
||||
Alternatively, you can write a generator that yields batches of training data and use the method `model.fit_generator(data_generator, samples_per_epoch, nb_epoch)`.
|
||||
|
||||
You can see batch training in action in our [CIFAR10 example](https://github.com/fchollet/keras/blob/master/examples/cifar10_cnn.py).
|
||||
|
||||
---
|
||||
|
||||
### How can I interrupt training when the validation loss isn't decreasing anymore?
|
||||
|
||||
You can use an `EarlyStopping` callback:
|
||||
|
||||
```python
|
||||
from keras.callbacks import EarlyStopping
|
||||
early_stopping = EarlyStopping(monitor='val_loss', patience=2)
|
||||
model.fit(X, y, validation_split=0.2, callbacks=[early_stopping])
|
||||
```
|
||||
|
||||
Find out more in the [callbacks documentation](/callbacks).
|
||||
|
||||
---
|
||||
|
||||
### How is the validation split computed?
|
||||
|
||||
If you set the `validation_split` argument in `model.fit` to e.g. 0.1, then the validation data used will be the *last 10%* of the data. If you set it to 0.25, it will be the last 25% of the data, etc.
|
||||
|
||||
|
||||
---
|
||||
|
||||
### Is the data shuffled during training?
|
||||
|
||||
Yes, if the `shuffle` argument in `model.fit` is set to `True` (which is the default), the training data will be randomly shuffled at each epoch.
|
||||
|
||||
Validation data is never shuffled.
|
||||
|
||||
---
|
||||
|
||||
|
||||
### How can I record the training / validation loss / accuracy at each epoch?
|
||||
|
||||
The `model.fit` method returns an `History` callback, which has a `history` attribute containing the lists of successive losses and other metrics.
|
||||
|
||||
```python
|
||||
hist = model.fit(X, y, validation_split=0.2)
|
||||
print(hist.history)
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### How can I "freeze" Keras layers?
|
||||
|
||||
To "freeze" a layer means to exclude it from training, i.e. its weights will never be updated. This is useful in the context of fine-tuning a model, or using fixed embeddings for a text input.
|
||||
|
||||
You can pass a `trainable` argument (boolean) to a layer constructor to set a layer to be non-trainable:
|
||||
|
||||
```python
|
||||
frozen_layer = Dense(32, trainable=False)
|
||||
```
|
||||
|
||||
Additionally, you can set the `trainable` property of a layer to `True` or `False` after instantiation. For this to take effect, you will need to call `compile()` on your model after modifying the `trainable` property. Here's an example:
|
||||
|
||||
```python
|
||||
x = Input(shape=(32,))
|
||||
layer = Dense(32)
|
||||
layer.trainable = False
|
||||
y = layer(x)
|
||||
|
||||
frozen_model = Model(x, y)
|
||||
# in the model below, the weights of `layer` will not be updated during training
|
||||
frozen_model.compile(optimizer='rmsprop', loss='mse')
|
||||
|
||||
layer.trainable = True
|
||||
trainable_model = Model(x, y)
|
||||
# with this model the weights of the layer will be updated during training
|
||||
# (which will also affect the above model since it uses the same layer instance)
|
||||
trainable_model.compile(optimizer='rmsprop', loss='mse')
|
||||
|
||||
frozen_model.fit(data, labels) # this does NOT update the weights of `layer`
|
||||
trainable_model.fit(data, labels) # this updates the weights of `layer`
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### How can I use stateful RNNs?
|
||||
|
||||
Making a RNN stateful means that the states for the samples of each batch will be reused as initial states for the samples in the next batch.
|
||||
|
||||
When using stateful RNNs, it is therefore assumed that:
|
||||
|
||||
- all batches have the same number of samples
|
||||
- If `X1` and `X2` are successive batches of samples, then `X2[i]` is the follow-up sequence to `X1[i]`, for every `i`.
|
||||
|
||||
To use statefulness in RNNs, you need to:
|
||||
|
||||
- explicitly specify the batch size you are using, by passing a `batch_input_shape` argument to the first layer in your model. It should be a tuple of integers, e.g. `(32, 10, 16)` for a 32-samples batch of sequences of 10 timesteps with 16 features per timestep.
|
||||
- set `stateful=True` in your RNN layer(s).
|
||||
|
||||
To reset the states accumulated:
|
||||
|
||||
- use `model.reset_states()` to reset the states of all layers in the model
|
||||
- use `layer.reset_states()` to reset the states of a specific stateful RNN layer
|
||||
|
||||
Example:
|
||||
|
||||
```python
|
||||
|
||||
X # this is our input data, of shape (32, 21, 16)
|
||||
# we will feed it to our model in sequences of length 10
|
||||
|
||||
model = Sequential()
|
||||
model.add(LSTM(32, batch_input_shape=(32, 10, 16), stateful=True))
|
||||
model.add(Dense(16, activation='softmax'))
|
||||
|
||||
model.compile(optimizer='rmsprop', loss='categorical_crossentropy')
|
||||
|
||||
# we train the network to predict the 11th timestep given the first 10:
|
||||
model.train_on_batch(X[:, :10, :], np.reshape(X[:, 10, :], (32, 16)))
|
||||
|
||||
# the state of the network has changed. We can feed the follow-up sequences:
|
||||
model.train_on_batch(X[:, 10:20, :], np.reshape(X[:, 20, :], (32, 16)))
|
||||
|
||||
# let's reset the states of the LSTM layer:
|
||||
model.reset_states()
|
||||
|
||||
# another way to do it in this case:
|
||||
model.layers[0].reset_states()
|
||||
```
|
||||
|
||||
Notes that the methods `predict`, `fit`, `train_on_batch`, `predict_classes`, etc. will *all* update the states of the stateful layers in a model. This allows you to do not only stateful training, but also stateful prediction.
|
||||
|
||||
---
|
||||
|
||||
### How can I remove a layer from a Sequential model?
|
||||
|
||||
You can remove the last added layer in a Sequential model by calling `.pop()`:
|
||||
|
||||
```python
|
||||
model = Sequential()
|
||||
model.add(Dense(32, activation='relu', input_dim=784))
|
||||
model.add(Dense(32, activation='relu'))
|
||||
|
||||
print(len(model.layers)) # "2"
|
||||
|
||||
model.pop()
|
||||
print(len(model.layers)) # "1"
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
### How can I use pre-trained models in Keras?
|
||||
|
||||
Code and pre-trained weights are available for the following image classification models:
|
||||
|
||||
- [VGG-16](https://gist.github.com/baraldilorenzo/07d7802847aaad0a35d3)
|
||||
- [VGG-19](https://gist.github.com/baraldilorenzo/8d096f48a1be4a2d660d)
|
||||
- [AlexNet](https://github.com/heuritech/convnets-keras)
|
||||
|
||||
For an example of how to use such a pre-trained model for feature extraction or for fine-tuning, see [this blog post](http://blog.keras.io/building-powerful-image-classification-models-using-very-little-data.html).
|
||||
|
||||
The VGG-16 model is also the basis for several Keras example scripts:
|
||||
|
||||
- [Style transfer](https://github.com/fchollet/keras/blob/master/examples/neural_style_transfer.py)
|
||||
- [Feature visualization](https://github.com/fchollet/keras/blob/master/examples/conv_filter_visualization.py)
|
||||
- [Deep dream](https://github.com/fchollet/keras/blob/master/examples/deep_dream.py)
|
||||
@@ -0,0 +1,421 @@
|
||||
# Getting started with the Keras functional API
|
||||
|
||||
The Keras functional API is the way to go for defining complex models, such as multi-output models, directed acyclic graphs, or models with shared layers.
|
||||
|
||||
This guide assumes that you are already familiar with the `Sequential` model.
|
||||
|
||||
Let's start with something simple.
|
||||
|
||||
-----
|
||||
|
||||
## First example: fully connected network
|
||||
|
||||
The `Sequential` model is probably a better choice to implement such a network, but it helps to start with something really simple.
|
||||
|
||||
- A layer instance is callable (on a tensor), and it returns a tensor
|
||||
- Input tensor(s) and output tensor(s) can then be used to define a `Model`
|
||||
- Such a model can be trained just like Keras `Sequential` models.
|
||||
|
||||
```python
|
||||
from keras.layers import Input, Dense
|
||||
from keras.models import Model
|
||||
|
||||
# this returns a tensor
|
||||
inputs = Input(shape=(784,))
|
||||
|
||||
# a layer instance is callable on a tensor, and returns a tensor
|
||||
x = Dense(64, activation='relu')(inputs)
|
||||
x = Dense(64, activation='relu')(x)
|
||||
predictions = Dense(10, activation='softmax')(x)
|
||||
|
||||
# this creates a model that includes
|
||||
# the Input layer and three Dense layers
|
||||
model = Model(input=inputs, output=predictions)
|
||||
model.compile(optimizer='rmsprop',
|
||||
loss='categorical_crossentropy',
|
||||
metrics=['accuracy'])
|
||||
model.fit(data, labels) # starts training
|
||||
```
|
||||
|
||||
-----
|
||||
|
||||
## All models are callable, just like layers
|
||||
|
||||
With the functional API, it is easy to re-use trained models: you can treat any model as if it were a layer, by calling it on a tensor. Note that by calling a model you aren't just re-using the *architecture* of the model, you are also re-using its weights.
|
||||
|
||||
```python
|
||||
x = Input(shape=(784,))
|
||||
# this works, and returns the 10-way softmax we defined above.
|
||||
y = model(x)
|
||||
```
|
||||
|
||||
This can allow, for instance, to quickly create models that can process *sequences* of inputs. You could turn an image classification model into a video classification model, in just one line.
|
||||
|
||||
```python
|
||||
from keras.layers import TimeDistributed
|
||||
|
||||
# input tensor for sequences of 20 timesteps,
|
||||
# each containing a 784-dimensional vector
|
||||
input_sequences = Input(shape=(20, 784))
|
||||
|
||||
# this applies our previous model to every timestep in the input sequences.
|
||||
# the output of the previous model was a 10-way softmax,
|
||||
# so the output of the layer below will be a sequence of 20 vectors of size 10.
|
||||
processed_sequences = TimeDistributed(model)(input_sequences)
|
||||
```
|
||||
|
||||
-----
|
||||
|
||||
## Multi-input and multi-output models
|
||||
|
||||
Here's a good use case for the functional API: models with multiple inputs and outputs. The functional API makes it easy to manipulate a large number of intertwined datastreams.
|
||||
|
||||
Let's consider the following model. We seek to predict how many retweets and likes a news headline will receive on Twitter. The main input to the model will be the headline itself, as a sequence of words, but to spice things up, our model will also have an auxiliary input, receiving extra data such as the time of day when the headline was posted, etc.
|
||||
The model will also be supervised via two loss functions. Using the main loss function earlier in a model is a good regularization mechanism for deep models.
|
||||
|
||||
Here's what our model looks like:
|
||||
|
||||
<img src="https://s3.amazonaws.com/keras.io/img/multi-input-multi-output-graph.png" alt="multi-input-multi-output-graph" style="width: 400px;"/>
|
||||
|
||||
Let's implement it with the functional API.
|
||||
|
||||
The main input will receive the headline, as a sequence of integers (each integer encodes a word).
|
||||
The integers will be between 1 and 10,000 (a vocabulary of 10,000 words) and the sequences will be 100 words long.
|
||||
|
||||
```python
|
||||
from keras.layers import Input, Embedding, LSTM, Dense, merge
|
||||
from keras.models import Model
|
||||
|
||||
# headline input: meant to receive sequences of 100 integers, between 1 and 10000.
|
||||
# note that we can name any layer by passing it a "name" argument.
|
||||
main_input = Input(shape=(100,), dtype='int32', name='main_input')
|
||||
|
||||
# this embedding layer will encode the input sequence
|
||||
# into a sequence of dense 512-dimensional vectors.
|
||||
x = Embedding(output_dim=512, input_dim=10000, input_length=100)(main_input)
|
||||
|
||||
# a LSTM will transform the vector sequence into a single vector,
|
||||
# containing information about the entire sequence
|
||||
lstm_out = LSTM(32)(x)
|
||||
```
|
||||
|
||||
Here we insert the auxiliary loss, allowing the LSTM and Embedding layer to be trained smoothly even though the main loss will be much higher in the model.
|
||||
|
||||
```python
|
||||
auxiliary_loss = Dense(1, activation='sigmoid', name='aux_output')(lstm_out)
|
||||
```
|
||||
|
||||
At this point, we feed into the model our auxiliary input data by concatenating it with the LSTM output:
|
||||
|
||||
```python
|
||||
auxiliary_input = Input(shape=(5,), name='aux_input')
|
||||
x = merge([lstm_out, auxiliary_input], mode='concat')
|
||||
|
||||
# we stack a deep fully-connected network on top
|
||||
x = Dense(64, activation='relu')(x)
|
||||
x = Dense(64, activation='relu')(x)
|
||||
x = Dense(64, activation='relu')(x)
|
||||
|
||||
# and finally we add the main logistic regression layer
|
||||
main_loss = Dense(1, activation='sigmoid', name='main_output')(x)
|
||||
```
|
||||
|
||||
This defines a model with two inputs and two outputs:
|
||||
|
||||
```python
|
||||
model = Model(input=[main_input, auxiliary_input], output=[main_loss, auxiliary_loss])
|
||||
```
|
||||
|
||||
We compile the model and assign a weight of 0.2 to the auxiliary loss.
|
||||
To specify different `loss_weights` or `loss` for each different output, you can use a list or a dictionary.
|
||||
Here we pass a single loss as the `loss` argument, so the same loss will be used on all outputs.
|
||||
|
||||
```python
|
||||
model.compile(optimizer='rmsprop', loss='binary_crossentropy',
|
||||
loss_weights=[1., 0.2])
|
||||
```
|
||||
|
||||
We can train the model by passing it lists of input arrays and target arrays:
|
||||
|
||||
```python
|
||||
model.fit([headline_data, additional_data], [labels, labels],
|
||||
nb_epoch=50, batch_size=32)
|
||||
```
|
||||
|
||||
Since our inputs and outputs are named (we passed them a "name" argument),
|
||||
We could also have compiled the model via:
|
||||
|
||||
```python
|
||||
model.compile(optimizer='rmsprop',
|
||||
loss={'main_output': 'binary_crossentropy', 'aux_output': 'binary_crossentropy'},
|
||||
loss_weights={'main_output': 1., 'aux_output': 0.2})
|
||||
|
||||
# and trained it via:
|
||||
model.fit({'main_input': headline_data, 'aux_input': additional_data},
|
||||
{'main_output': labels, 'aux_output': labels},
|
||||
nb_epoch=50, batch_size=32)
|
||||
```
|
||||
|
||||
-----
|
||||
|
||||
## Shared layers
|
||||
|
||||
Another good use for the functional API are models that use shared layers. Let's take a look at shared layers.
|
||||
|
||||
Let's consider a dataset of tweets. We want to build a model that can tell whether two tweets are from the same person or not (this can allow us to compare users by the similarity of their tweets, for instance).
|
||||
|
||||
One way to achieve this is to build a model that encodes two tweets into two vectors, concatenates the vectors and adds a logistic regression of top, outputting a probability that the two tweets share the same author. The model would then be trained on positive tweet pairs and negative tweet pairs.
|
||||
|
||||
Because the problem is symmetric, the mechanism that encodes the first tweet should be reused (weights and all) to encode the second tweet. Here we use a shared LSTM layer to encode the tweets.
|
||||
|
||||
Let's build this with the functional API. We will take as input for a tweet a binary matrix of shape `(140, 256)`, i.e. a sequence of 140 vectors of size 256, where each dimension in the 256-dimensional vector encodes the presence/absence of a character (out of an alphabet of 256 frequent characters).
|
||||
|
||||
```python
|
||||
from keras.layers import Input, LSTM, Dense, merge
|
||||
from keras.models import Model
|
||||
|
||||
tweet_a = Input(shape=(140, 256))
|
||||
tweet_b = Input(shape=(140, 256))
|
||||
```
|
||||
|
||||
To share a layer across different inputs, simply instantiate the layer once, then call it on as many inputs as you want:
|
||||
|
||||
```python
|
||||
# this layer can take as input a matrix
|
||||
# and will return a vector of size 64
|
||||
shared_lstm = LSTM(64)
|
||||
|
||||
# when we reuse the same layer instance
|
||||
# multiple times, the weights of the layer
|
||||
# are also being reused
|
||||
# (it is effectively *the same* layer)
|
||||
encoded_a = shared_lstm(tweet_a)
|
||||
encoded_b = shared_lstm(tweet_b)
|
||||
|
||||
# we can then concatenate the two vectors:
|
||||
merged_vector = merge([encoded_a, encoded_b], mode='concat', concat_axis=-1)
|
||||
|
||||
# and add a logistic regression on top
|
||||
predictions = Dense(1, activation='sigmoid')(merged_vector)
|
||||
|
||||
# we define a trainable model linking the
|
||||
# tweet inputs to the predictions
|
||||
model = Model(input=[tweet_a, tweet_b], output=predictions)
|
||||
|
||||
model.compile(optimizer='rmsprop',
|
||||
loss='binary_crossentropy',
|
||||
metrics=['accuracy'])
|
||||
model.fit([data_a, data_b], labels, nb_epoch=10)
|
||||
```
|
||||
|
||||
Let's pause to take a look at how to read the shared layer's output or output shape.
|
||||
|
||||
-----
|
||||
|
||||
## The concept of layer "node"
|
||||
|
||||
Whenever you are calling a layer on some input, you are creating a new tensor (the output of the layer), and you are adding a "node" to the layer, linking the input tensor to the output tensor. When you are calling the same layer multiple times, that layer owns multiple nodes indexed as 0, 1, 2...
|
||||
|
||||
In previous versions of Keras, you could obtain the output tensor of a layer instance via `layer.get_output()`, or its output shape via `layer.output_shape`. You still can (except `get_output()` has been replaced by the property `output`). But what if a layer is connected to multiple inputs?
|
||||
|
||||
As long as a layer is only connected to one input, there is no confusion, and `.output` will return the one output of the layer:
|
||||
|
||||
```python
|
||||
a = Input(shape=(140, 256))
|
||||
|
||||
lstm = LSTM(32)
|
||||
encoded_a = lstm(a)
|
||||
|
||||
assert lstm.output == encoded_a
|
||||
```
|
||||
|
||||
Not so if the layer has multiple inputs:
|
||||
```python
|
||||
a = Input(shape=(140, 256))
|
||||
b = Input(shape=(140, 256))
|
||||
|
||||
lstm = LSTM(32)
|
||||
encoded_a = lstm(a)
|
||||
encoded_b = lstm(b)
|
||||
|
||||
lstm.output
|
||||
```
|
||||
```
|
||||
>> AssertionError: Layer lstm_1 has multiple inbound nodes,
|
||||
hence the notion of "layer output" is ill-defined.
|
||||
Use `get_output_at(node_index)` instead.
|
||||
```
|
||||
|
||||
Okay then. The following works:
|
||||
|
||||
```python
|
||||
assert lstm.get_output_at(0) == encoded_a
|
||||
assert lstm.get_output_at(1) == encoded_b
|
||||
```
|
||||
|
||||
Simple enough, right?
|
||||
|
||||
The same is true for the properties `input_shape` and `output_shape`: as long as the layer has only one node, or as long as all nodes have the same input/output shape, then the notion of "layer output/input shape" is well defined, and that one shape will be returned by `layer.output_shape`/`layer.input_shape`. But if, for instance, you apply a same `Convolution2D` layer to an input of shape `(3, 32, 32)`, and then to an input of shape `(3, 64, 64)`, the layer will have multiple input/output shapes, and you will have to fetch them by specifying the index of the node they belong to:
|
||||
|
||||
```python
|
||||
a = Input(shape=(3, 32, 32))
|
||||
b = Input(shape=(3, 64, 64))
|
||||
|
||||
conv = Convolution2D(16, 3, 3, border_mode='same')
|
||||
conved_a = conv(a)
|
||||
|
||||
# only one input so far, the following will work:
|
||||
assert conv.input_shape == (None, 3, 32, 32)
|
||||
|
||||
conved_b = conv(b)
|
||||
# now the `.input_shape` property wouldn't work, but this does:
|
||||
assert conv.get_input_shape_at(0) == (None, 3, 32, 32)
|
||||
assert conv.get_input_shape_at(1) == (None, 3, 64, 64)
|
||||
```
|
||||
|
||||
-----
|
||||
|
||||
## More examples
|
||||
|
||||
Code examples are still the best way to get started, so here are a few more.
|
||||
|
||||
### Inception module
|
||||
|
||||
For more information about the Inception architecture, see [Going Deeper with Convolutions](http://arxiv.org/abs/1409.4842).
|
||||
|
||||
```python
|
||||
from keras.layers import merge, Convolution2D, MaxPooling2D, Input
|
||||
|
||||
input_img = Input(shape=(3, 256, 256))
|
||||
|
||||
tower_1 = Convolution2D(64, 1, 1, border_mode='same', activation='relu')(input_img)
|
||||
tower_1 = Convolution2D(64, 3, 3, border_mode='same', activation='relu')(tower_1)
|
||||
|
||||
tower_2 = Convolution2D(64, 1, 1, border_mode='same', activation='relu')(input_img)
|
||||
tower_2 = Convolution2D(64, 5, 5, border_mode='same', activation='relu')(tower_2)
|
||||
|
||||
tower_3 = MaxPooling2D((3, 3), strides=(1, 1), border_mode='same')(input_img)
|
||||
tower_3 = Convolution2D(64, 1, 1, border_mode='same', activation='relu')(tower_3)
|
||||
|
||||
output = merge([tower_1, tower_2, tower_3], mode='concat', concat_axis=1)
|
||||
```
|
||||
|
||||
### Residual connection on a convolution layer
|
||||
|
||||
For more information about residual networks, see [Deep Residual Learning for Image Recognition](http://arxiv.org/abs/1512.03385).
|
||||
|
||||
```python
|
||||
from keras.layers import merge, Convolution2D, Input
|
||||
|
||||
# input tensor for a 3-channel 256x256 image
|
||||
x = Input(shape=(3, 256, 256))
|
||||
# 3x3 conv with 3 output channels (same as input channels)
|
||||
y = Convolution2D(3, 3, 3, border_mode='same')(x)
|
||||
# this returns x + y.
|
||||
z = merge([x, y], mode='sum')
|
||||
```
|
||||
|
||||
### Shared vision model
|
||||
|
||||
This model re-uses the same image-processing module on two inputs, to classify whether two MNIST digits are the same digit or different digits.
|
||||
|
||||
```python
|
||||
from keras.layers import merge, Convolution2D, MaxPooling2D, Input, Dense, Flatten
|
||||
from keras.models import Model
|
||||
|
||||
# first, define the vision modules
|
||||
digit_input = Input(shape=(1, 27, 27))
|
||||
x = Convolution2D(64, 3, 3)(digit_input)
|
||||
x = Convolution2D(64, 3, 3)(x)
|
||||
x = MaxPooling2D((2, 2))(x)
|
||||
out = Flatten()(x)
|
||||
|
||||
vision_model = Model(digit_input, out)
|
||||
|
||||
# then define the tell-digits-apart model
|
||||
digit_a = Input(shape=(1, 27, 27))
|
||||
digit_b = Input(shape=(1, 27, 27))
|
||||
|
||||
# the vision model will be shared, weights and all
|
||||
out_a = vision_model(digit_a)
|
||||
out_b = vision_model(digit_b)
|
||||
|
||||
concatenated = merge([out_a, out_b], mode='concat')
|
||||
out = Dense(1, activation='sigmoid')(concatenated)
|
||||
|
||||
classification_model = Model([digit_a, digit_b], out)
|
||||
```
|
||||
|
||||
### Visual question answering model
|
||||
|
||||
This model can select the correct one-word answer when asked a natural-language question about a picture.
|
||||
|
||||
It works by encoding the question into a vector, encoding the image into a vector, concatenating the two, and training on top a logistic regression over some vocabulary of potential answers.
|
||||
|
||||
```python
|
||||
from keras.layers import Convolution2D, MaxPooling2D, Flatten
|
||||
from keras.layers import Input, LSTM, Embedding, Dense, merge
|
||||
from keras.models import Model, Sequential
|
||||
|
||||
# first, let's define a vision model using a Sequential model.
|
||||
# this model will encode an image into a vector.
|
||||
vision_model = Sequential()
|
||||
vision_model.add(Convolution2D(64, 3, 3, activation='relu', border_mode='same', input_shape=(3, 224, 224)))
|
||||
vision_model.add(Convolution2D(64, 3, 3, activation='relu'))
|
||||
vision_model.add(MaxPooling2D((2, 2)))
|
||||
vision_model.add(Convolution2D(128, 3, 3, activation='relu', border_mode='same'))
|
||||
vision_model.add(Convolution2D(128, 3, 3, activation='relu'))
|
||||
vision_model.add(MaxPooling2D((2, 2)))
|
||||
vision_model.add(Convolution2D(256, 3, 3, activation='relu', border_mode='same'))
|
||||
vision_model.add(Convolution2D(256, 3, 3, activation='relu'))
|
||||
vision_model.add(Convolution2D(256, 3, 3, activation='relu'))
|
||||
vision_model.add(MaxPooling2D((2, 2)))
|
||||
vision_model.add(Flatten())
|
||||
|
||||
# now let's get a tensor with the output of our vision model:
|
||||
image_input = Input(shape=(3, 224, 224))
|
||||
encoded_image = vision_model(image_input)
|
||||
|
||||
# next, let's define a language model to encode the question into a vector.
|
||||
# each question will be at most 100 word long,
|
||||
# and we will index words as integers from 1 to 9999.
|
||||
question_input = Input(shape=(100,), dtype='int32')
|
||||
embedded_question = Embedding(input_dim=10000, output_dim=256, input_length=100)(question_input)
|
||||
encoded_question = LSTM(256)(embedded_question)
|
||||
|
||||
# let's concatenate the question vector and the image vector:
|
||||
merged = merge([encoded_question, encoded_image], mode='concat')
|
||||
|
||||
# and let's train a logistic regression over 1000 words on top:
|
||||
output = Dense(1000, activation='softmax')(merged)
|
||||
|
||||
# this is our final model:
|
||||
vqa_model = Model(input=[image_input, question_input], output=output)
|
||||
|
||||
# the next stage would be training this model on actual data.
|
||||
```
|
||||
|
||||
### Video question answering model
|
||||
|
||||
Now that we have trained our image QA model, we can quickly turn it into a video QA model. With appropriate training, you will be able to show it a short video (e.g. 100-frame human action) and ask a natural language question about the video (e.g. "what sport is the boy playing?" -> "football").
|
||||
|
||||
```python
|
||||
from keras.layers import TimeDistributed
|
||||
|
||||
video_input = Input(shape=(100, 3, 224, 224))
|
||||
# this is our video encoded via the previously trained vision_model (weights are reused)
|
||||
encoded_frame_sequence = TimeDistributed(vision_model)(video_input) # the output will be a sequence of vectors
|
||||
encoded_video = LSTM(256)(encoded_frame_sequence) # the output will be a vector
|
||||
|
||||
# this is a model-level representation of the question encoder, reusing the same weights as before:
|
||||
question_encoder = Model(input=question_input, output=encoded_question)
|
||||
|
||||
# let's use it to encode the question:
|
||||
video_question_input = Input(shape=(100,), dtype='int32')
|
||||
encoded_video_question = question_encoder(video_question_input)
|
||||
|
||||
# and this is our video question answering model:
|
||||
merged = merge([encoded_video, encoded_video_question], mode='concat')
|
||||
output = Dense(1000, activation='softmax')(merged)
|
||||
video_qa_model = Model(input=[video_input, video_question_input], output=output)
|
||||
```
|
||||
+232
-73
@@ -1,3 +1,209 @@
|
||||
# Getting started with the Keras Sequential model
|
||||
|
||||
The `Sequential` model is a linear stack of layers.
|
||||
|
||||
You can create a `Sequential` model by passing a list of layer instances to the constructor:
|
||||
|
||||
```python
|
||||
from keras.models import Sequential
|
||||
from keras.layers import Dense, Activation
|
||||
|
||||
model = Sequential([
|
||||
Dense(32, input_dim=784),
|
||||
Activation('relu'),
|
||||
Dense(10),
|
||||
Activation('softmax'),
|
||||
])
|
||||
```
|
||||
|
||||
You can also simply add layers via the `.add()` method:
|
||||
|
||||
```python
|
||||
model = Sequential()
|
||||
model.add(Dense(32, input_dim=784))
|
||||
model.add(Activation('relu'))
|
||||
```
|
||||
|
||||
----
|
||||
|
||||
## Specifying the input shape
|
||||
|
||||
The model needs to know what input shape it should expect. For this reason, the first layer in a `Sequential` model (and only the first, because following layers can do automatic shape inference) needs to receive information about its input shape. There are several possible ways to do this:
|
||||
|
||||
- pass an `input_shape` argument to the first layer. This is a shape tuple (a tuple of integers or `None` entries, where `None` indicates that any positive integer may be expected). In `input_shape`, the batch dimension is not included.
|
||||
- pass instead a `batch_input_shape` argument, where the batch dimension is included. This is useful for specifying a fixed batch size (e.g. with stateful RNNs).
|
||||
- some 2D layers, such as `Dense`, support the specification of their input shape via the argument `input_dim`, and some 3D temporal layers support the arguments `input_dim` and `input_length`.
|
||||
|
||||
As such, the following three snippets are strictly equivalent:
|
||||
```python
|
||||
model = Sequential()
|
||||
model.add(Dense(32, input_shape=(784,)))
|
||||
```
|
||||
```python
|
||||
model = Sequential()
|
||||
model.add(Dense(32, batch_input_shape=(None, 784)))
|
||||
# note that batch dimension is "None" here,
|
||||
# so the model will be able to process batches of any size.
|
||||
```
|
||||
```python
|
||||
model = Sequential()
|
||||
model.add(Dense(32, input_dim=784))
|
||||
```
|
||||
|
||||
And so are the following three snippets:
|
||||
```python
|
||||
model = Sequential()
|
||||
model.add(LSTM(32, input_shape=(10, 64)))
|
||||
```
|
||||
```python
|
||||
model = Sequential()
|
||||
model.add(LSTM(32, batch_input_shape=(None, 10, 64)))
|
||||
```
|
||||
```python
|
||||
model = Sequential()
|
||||
model.add(LSTM(32, input_length=10, input_dim=64))
|
||||
```
|
||||
|
||||
----
|
||||
|
||||
## The Merge layer
|
||||
|
||||
Multiple `Sequential` instances can be merged into a single output via a `Merge` layer. The output is a layer that can be added as first layer in a new `Sequential` model. For instance, here's a model with two separate input branches getting merged:
|
||||
|
||||
```python
|
||||
from keras.layers import Merge
|
||||
|
||||
left_branch = Sequential()
|
||||
left_branch.add(Dense(32, input_dim=784))
|
||||
|
||||
right_branch = Sequential()
|
||||
right_branch.add(Dense(32, input_dim=784))
|
||||
|
||||
merged = Merge([left_branch, right_branch], mode='concat')
|
||||
|
||||
final_model = Sequential()
|
||||
final_model.add(merged)
|
||||
final_model.add(Dense(10, activation='softmax'))
|
||||
```
|
||||
|
||||
<img src="https://s3.amazonaws.com/keras.io/img/two_branches_sequential_model.png" alt="two branch Sequential" style="width: 400px;"/>
|
||||
|
||||
Such a two-branch model can then be trained via e.g.:
|
||||
|
||||
```python
|
||||
final_model.compile(optimizer='rmsprop', loss='categorical_crossentropy')
|
||||
final_model.fit([input_data_1, input_data_2], targets) # we pass one data array per model input
|
||||
```
|
||||
|
||||
The `Merge` layer supports a number of pre-defined modes:
|
||||
|
||||
- `sum` (default): element-wise sum
|
||||
- `concat`: tensor concatenation. You can specify the concatenation axis via the argument `concat_axis`.
|
||||
- `mul`: element-wise multiplication
|
||||
- `ave`: tensor average
|
||||
- `dot`: dot product. You can specify which axes to reduce along via the argument `dot_axes`.
|
||||
- `cos`: cosine proximity between vectors in 2D tensors.
|
||||
|
||||
You can also pass a function as the `mode` argument, allowing for arbitrary transformations:
|
||||
|
||||
```python
|
||||
merged = Merge([left_branch, right_branch], mode=lambda x, y: x - y)
|
||||
```
|
||||
|
||||
Now you know enough to be able to define *almost* any model with Keras. For complex models that cannot be expressed via `Sequential` and `Merge`, you can use [the functional API](/getting-started/functional-api-guide).
|
||||
|
||||
|
||||
----
|
||||
|
||||
## Compilation
|
||||
|
||||
Before training a model, you need to configure the learning process, which is done via the `compile` method. It receives three arguments:
|
||||
|
||||
- an optimizer. This could be the string identifier of an existing optimizer (such as `rmsprop` or `adagrad`), or an instance of the `Optimizer` class. See: [optimizers](/optimizers).
|
||||
- a loss function. This is the objective that the model will try to minimize. It can be the string identifier of an existing loss function (such as `categorical_crossentropy` or `mse`), or it can be an objective function. See: [objectives](/objectives).
|
||||
- a list of metrics. For any classification problem you will want to set this to `metrics=['accuracy']`. A metric could be the string identifier of an existing metric (only `accuracy` is supported at this point), or a custom metric function.
|
||||
|
||||
```python
|
||||
# for a multi-class classification problem
|
||||
model.compile(optimizer='rmsprop',
|
||||
loss='categorical_crossentropy',
|
||||
metrics=['accuracy'])
|
||||
|
||||
# for a binary classification problem
|
||||
model.compile(optimizer='rmsprop',
|
||||
loss='binary_crossentropy',
|
||||
metrics=['accuracy'])
|
||||
|
||||
# for a mean squared error regression problem
|
||||
model.compile(optimizer='rmsprop',
|
||||
loss='mse')
|
||||
```
|
||||
|
||||
----
|
||||
|
||||
## Training
|
||||
|
||||
Keras models are trained on Numpy arrays of input data and labels. For training a model, you will typically use the `fit` function. [Read its documentation here](/models/sequential).
|
||||
|
||||
```python
|
||||
# for a single-input model with 2 classes (binary):
|
||||
|
||||
model = Sequential()
|
||||
model.add(Dense(1, input_dim=784, activation='sigmoid'))
|
||||
model.compile(optimizer='rmsprop',
|
||||
loss='binary_crossentropy',
|
||||
metrics=['accuracy'])
|
||||
|
||||
# generate dummy data
|
||||
import numpy as np
|
||||
data = np.random.random((1000, 784))
|
||||
labels = np.random.randint(2, size=(1000, 1))
|
||||
|
||||
# train the model, iterating on the data in batches
|
||||
# of 32 samples
|
||||
model.fit(data, labels, nb_epoch=10, batch_size=32)
|
||||
```
|
||||
```python
|
||||
# for a multi-input model with 10 classes:
|
||||
|
||||
left_branch = Sequential()
|
||||
left_branch.add(Dense(32, input_dim=784))
|
||||
|
||||
right_branch = Sequential()
|
||||
right_branch.add(Dense(32, input_dim=784))
|
||||
|
||||
merged = Merge([left_branch, right_branch], mode='concat')
|
||||
|
||||
model = Sequential()
|
||||
model.add(merged)
|
||||
model.add(Dense(10, activation='softmax'))
|
||||
|
||||
model.compile(optimizer='rmsprop',
|
||||
loss='categorical_crossentropy',
|
||||
metrics=['accuracy'])
|
||||
|
||||
# generate dummy data
|
||||
import numpy as np
|
||||
from keras.utils.np_utils import to_categorical
|
||||
data_1 = np.random.random((1000, 784))
|
||||
data_2 = np.random.random((1000, 784))
|
||||
|
||||
# these are integers between 0 and 9
|
||||
labels = np.random.randint(10, size=(1000, 1))
|
||||
# we convert the labels to a binary matrix of size (1000, 10)
|
||||
# for use with categorical_crossentropy
|
||||
labels = to_categorical(labels, 10)
|
||||
|
||||
# train the model
|
||||
# note that we are passing a list of Numpy arrays as training data
|
||||
# since the model has 2 inputs
|
||||
model.fit([data_1, data_2], labels, nb_epoch=10, batch_size=32)
|
||||
```
|
||||
|
||||
----
|
||||
|
||||
|
||||
## Examples
|
||||
|
||||
Here are a few examples to get you started!
|
||||
|
||||
@@ -11,7 +217,6 @@ In the examples folder, you will also find example models for real datasets:
|
||||
|
||||
...and more.
|
||||
|
||||
------------------
|
||||
|
||||
### Multilayer Perceptron (MLP) for multi-class softmax classification:
|
||||
|
||||
@@ -35,16 +240,15 @@ model.add(Activation('softmax'))
|
||||
|
||||
sgd = SGD(lr=0.1, decay=1e-6, momentum=0.9, nesterov=True)
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer=sgd)
|
||||
optimizer=sgd,
|
||||
metrics=['accuracy'])
|
||||
|
||||
model.fit(X_train, y_train,
|
||||
nb_epoch=20,
|
||||
batch_size=16,
|
||||
show_accuracy=True)
|
||||
batch_size=16)
|
||||
score = model.evaluate(X_test, y_test, batch_size=16)
|
||||
```
|
||||
|
||||
------------------
|
||||
|
||||
### Alternative implementation of a similar MLP:
|
||||
|
||||
@@ -56,10 +260,11 @@ model.add(Dense(64, activation='relu'))
|
||||
model.add(Dropout(0.5))
|
||||
model.add(Dense(10, activation='softmax'))
|
||||
|
||||
model.compile(loss='categorical_crossentropy', optimizer='adadelta')
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='adadelta',
|
||||
metrics=['accuracy'])
|
||||
```
|
||||
|
||||
------------------
|
||||
|
||||
### MLP for binary classification:
|
||||
```python
|
||||
@@ -71,10 +276,10 @@ model.add(Dropout(0.5))
|
||||
model.add(Dense(1, activation='sigmoid'))
|
||||
|
||||
model.compile(loss='binary_crossentropy',
|
||||
optimizer='rmsprop')
|
||||
optimizer='rmsprop',
|
||||
metrics=['accuracy'])
|
||||
```
|
||||
|
||||
------------------
|
||||
|
||||
### VGG-like convnet:
|
||||
|
||||
@@ -114,10 +319,8 @@ sgd = SGD(lr=0.1, decay=1e-6, momentum=0.9, nesterov=True)
|
||||
model.compile(loss='categorical_crossentropy', optimizer=sgd)
|
||||
|
||||
model.fit(X_train, Y_train, batch_size=32, nb_epoch=1)
|
||||
|
||||
```
|
||||
|
||||
------------------
|
||||
|
||||
### Sequence classification with LSTM:
|
||||
|
||||
@@ -134,7 +337,9 @@ model.add(Dropout(0.5))
|
||||
model.add(Dense(1))
|
||||
model.add(Activation('sigmoid'))
|
||||
|
||||
model.compile(loss='binary_crossentropy', optimizer='rmsprop')
|
||||
model.compile(loss='binary_crossentropy',
|
||||
optimizer='rmsprop',
|
||||
metrics=['accuracy'])
|
||||
|
||||
model.fit(X_train, Y_train, batch_size=16, nb_epoch=10)
|
||||
score = model.evaluate(X_test, Y_test, batch_size=16)
|
||||
@@ -176,7 +381,7 @@ image_model.load_weights('weight_file.h5')
|
||||
language_model = Sequential()
|
||||
language_model.add(Embedding(vocab_size, 256, input_length=max_caption_len))
|
||||
language_model.add(GRU(output_dim=128, return_sequences=True))
|
||||
language_model.add(TimeDistributedDense(128))
|
||||
language_model.add(TimeDistributed(Dense(128)))
|
||||
|
||||
# let's repeat the image vector to turn it into a sequence.
|
||||
image_model.add(RepeatVector(max_caption_len))
|
||||
@@ -203,7 +408,6 @@ model.compile(loss='categorical_crossentropy', optimizer='rmsprop')
|
||||
model.fit([images, partial_captions], next_words, batch_size=16, nb_epoch=100)
|
||||
```
|
||||
|
||||
------------------
|
||||
|
||||
### Stacked LSTM for sequence classification
|
||||
|
||||
@@ -214,10 +418,7 @@ The first two LSTMs return their full output sequences, but the last one only re
|
||||
the last step in its output sequence, thus dropping the temporal dimension
|
||||
(i.e. converting the input sequence into a single vector).
|
||||
|
||||
<img src="http://keras.io/img/regular_stacked_lstm.png" alt="stacked LSTM" style="width: 300px;"/>
|
||||
|
||||
(N.B.: in Keras, "None" in an input shape indicates a variable dimension. In the graph above, the batch size is "None",
|
||||
meaning that any batch size is allowed for the input data).
|
||||
<img src="https://keras.io/img/regular_stacked_lstm.png" alt="stacked LSTM" style="width: 300px;"/>
|
||||
|
||||
```python
|
||||
from keras.models import Sequential
|
||||
@@ -236,7 +437,9 @@ model.add(LSTM(32, return_sequences=True)) # returns a sequence of vectors of d
|
||||
model.add(LSTM(32)) # return a single vector of dimension 32
|
||||
model.add(Dense(10, activation='softmax'))
|
||||
|
||||
model.compile(loss='categorical_crossentropy', optimizer='rmsprop')
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='rmsprop',
|
||||
metrics=['accuracy'])
|
||||
|
||||
# generate dummy training data
|
||||
x_train = np.random.random((1000, timesteps, data_dim))
|
||||
@@ -247,11 +450,10 @@ x_val = np.random.random((100, timesteps, data_dim))
|
||||
y_val = np.random.random((100, nb_classes))
|
||||
|
||||
model.fit(x_train, y_train,
|
||||
batch_size=64, nb_epoch=5, show_accuracy=True,
|
||||
batch_size=64, nb_epoch=5,
|
||||
validation_data=(x_val, y_val))
|
||||
```
|
||||
|
||||
------------------
|
||||
|
||||
### Same stacked LSTM model, rendered "stateful"
|
||||
|
||||
@@ -281,7 +483,9 @@ model.add(LSTM(32, return_sequences=True, stateful=True))
|
||||
model.add(LSTM(32, stateful=True))
|
||||
model.add(Dense(10, activation='softmax'))
|
||||
|
||||
model.compile(loss='categorical_crossentropy', optimizer='rmsprop')
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='rmsprop',
|
||||
metrics=['accuracy'])
|
||||
|
||||
# generate dummy training data
|
||||
x_train = np.random.random((batch_size * 10, timesteps, data_dim))
|
||||
@@ -292,11 +496,10 @@ x_val = np.random.random((batch_size * 3, timesteps, data_dim))
|
||||
y_val = np.random.random((batch_size * 3, nb_classes))
|
||||
|
||||
model.fit(x_train, y_train,
|
||||
batch_size=batch_size, nb_epoch=5, show_accuracy=True,
|
||||
batch_size=batch_size, nb_epoch=5,
|
||||
validation_data=(x_val, y_val))
|
||||
```
|
||||
|
||||
------------------
|
||||
|
||||
### Two merged LSTM encoders for classification over two parallel sequences
|
||||
|
||||
@@ -304,7 +507,7 @@ In this model, two input sequences are encoded into vectors by two separate LSTM
|
||||
|
||||
These two vectors are then concatenated, and a fully connected network is trained on top of the concatenated representations.
|
||||
|
||||
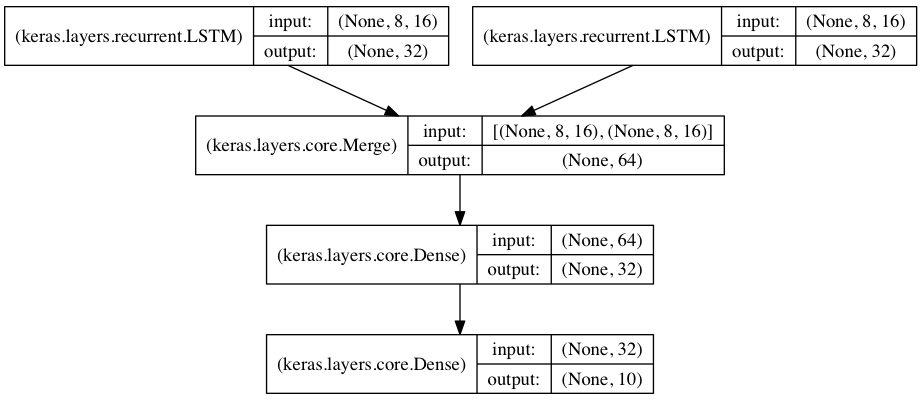
|
||||
<img src="https://keras.io/img/dual_lstm.png" alt="Dual LSTM" style="width: 600px;"/>
|
||||
|
||||
```python
|
||||
from keras.models import Sequential
|
||||
@@ -326,7 +529,9 @@ decoder.add(Merge([encoder_a, encoder_b], mode='concat'))
|
||||
decoder.add(Dense(32, activation='relu'))
|
||||
decoder.add(Dense(nb_classes, activation='softmax'))
|
||||
|
||||
decoder.compile(loss='categorical_crossentropy', optimizer='rmsprop')
|
||||
decoder.compile(loss='categorical_crossentropy',
|
||||
optimizer='rmsprop',
|
||||
metrics=['accuracy'])
|
||||
|
||||
# generate dummy training data
|
||||
x_train_a = np.random.random((1000, timesteps, data_dim))
|
||||
@@ -339,52 +544,6 @@ x_val_b = np.random.random((100, timesteps, data_dim))
|
||||
y_val = np.random.random((100, nb_classes))
|
||||
|
||||
decoder.fit([x_train_a, x_train_b], y_train,
|
||||
batch_size=64, nb_epoch=5, show_accuracy=True,
|
||||
batch_size=64, nb_epoch=5,
|
||||
validation_data=([x_val_a, x_val_b], y_val))
|
||||
```
|
||||
|
||||
------------------
|
||||
|
||||
### Single shared LSTM over two parallel sequences, for classification
|
||||
|
||||
This is a similar setup as above, but now a single LSTM encoder is used for both input sequences.
|
||||
Such a setup makes sense if the two input sequences are the same type of object.
|
||||
|
||||
<img src="http://keras.io/img/shared_lstm.png" alt="Shared LSTM" style="width: 500px;"/>
|
||||
|
||||
```python
|
||||
from keras.models import Graph
|
||||
from keras.layers import LSTM, Dense
|
||||
import numpy as np
|
||||
|
||||
data_dim = 16
|
||||
timesteps = 8
|
||||
nb_classes = 10
|
||||
|
||||
encoder = Sequential()
|
||||
encoder.add(LSTM(32, input_shape=(timesteps, data_dim)))
|
||||
|
||||
model = Graph()
|
||||
model.add_input(name='input_a', input_shape=(timesteps, data_dim))
|
||||
model.add_input(name='input_b', input_shape=(timesteps, data_dim))
|
||||
model.add_shared_node(encoder, name='shared_encoder', inputs=['input_a', 'input_b'],
|
||||
merge_mode='concat')
|
||||
model.add_node(Dense(64, activation='relu'), name='fc1', input='shared_encoder')
|
||||
model.add_node(Dense(3, activation='softmax'), name='output', input='fc1', create_output=True)
|
||||
|
||||
model.compile(optimizer='adam', loss={'output': 'categorical_crossentropy'})
|
||||
|
||||
# generate dummy training data
|
||||
x_train_a = np.random.random((1000, timesteps, data_dim))
|
||||
x_train_b = np.random.random((1000, timesteps, data_dim))
|
||||
y_train = np.random.random((1000, 3))
|
||||
|
||||
# generate dummy validation data
|
||||
x_val_a = np.random.random((100, timesteps, data_dim))
|
||||
x_val_b = np.random.random((100, timesteps, data_dim))
|
||||
y_val = np.random.random((100, 3))
|
||||
|
||||
model.fit({'input_a': x_train_a, 'input_b': x_train_b, 'output': y_train},
|
||||
batch_size=64, nb_epoch=5,
|
||||
validation_data={'input_a': x_val_a, 'input_b': x_val_b, 'output': y_val})
|
||||
```
|
||||
externo
+13
-15
@@ -33,11 +33,12 @@ Keras is compatible with: __Python 2.7-3.5__.
|
||||
------------------
|
||||
|
||||
|
||||
|
||||
## Getting started: 30 seconds to Keras
|
||||
|
||||
The core datastructure of Keras is a __model__, a way to organize layers. There are two types of models: [`Sequential`](http://keras.io/models/#sequential) and [`Graph`](http://keras.io/models/#graph).
|
||||
The core data structure of Keras is a __model__, a way to organize layers. The main type of model is the [`Sequential`](http://keras.io/getting-started/sequential-model-guide) model, a linear stack of layers. For more complex architectures, you should use the [Keras functional API](http://keras.io/getting-started/functional-api-guide).
|
||||
|
||||
Here's the `Sequential` model (a linear pile of layers):
|
||||
Here's the `Sequential` model:
|
||||
|
||||
```python
|
||||
from keras.models import Sequential
|
||||
@@ -48,17 +49,17 @@ model = Sequential()
|
||||
Stacking layers is as easy as `.add()`:
|
||||
|
||||
```python
|
||||
from keras.layers.core import Dense, Activation
|
||||
from keras.layers import Dense, Activation
|
||||
|
||||
model.add(Dense(output_dim=64, input_dim=100, init="glorot_uniform"))
|
||||
model.add(Dense(output_dim=64, input_dim=100))
|
||||
model.add(Activation("relu"))
|
||||
model.add(Dense(output_dim=10, init="glorot_uniform"))
|
||||
model.add(Dense(output_dim=10))
|
||||
model.add(Activation("softmax"))
|
||||
```
|
||||
|
||||
Once your model looks good, configure its learning process with `.compile()`:
|
||||
```python
|
||||
model.compile(loss='categorical_crossentropy', optimizer='sgd')
|
||||
model.compile(loss='categorical_crossentropy', optimizer='sgd', metrics=['accuracy'])
|
||||
```
|
||||
|
||||
If you need to, you can further configure your optimizer. A core principle of Keras is to make things reasonably simple, while allowing the user to be fully in control when they need to (the ultimate control being the easy extensibility of the source code).
|
||||
@@ -79,7 +80,7 @@ model.train_on_batch(X_batch, Y_batch)
|
||||
|
||||
Evaluate your performance in one line:
|
||||
```python
|
||||
objective_score = model.evaluate(X_test, Y_test, batch_size=32)
|
||||
loss_and_metrics = model.evaluate(X_test, Y_test, batch_size=32)
|
||||
```
|
||||
|
||||
Or generate predictions on new data:
|
||||
@@ -88,12 +89,14 @@ classes = model.predict_classes(X_test, batch_size=32)
|
||||
proba = model.predict_proba(X_test, batch_size=32)
|
||||
```
|
||||
|
||||
Building a network of LSTMs, a deep CNN, a Neural Turing Machine, a word2vec embedder or any other model is just as fast. The ideas behind deep learning are simple, so why should their implementation be painful?
|
||||
Building a question answering system, an image classification model, a Neural Turing Machine, a word2vec embedder or any other model is just as fast. The ideas behind deep learning are simple, so why should their implementation be painful?
|
||||
|
||||
Have a look at these [starter examples](http://keras.io/examples/).
|
||||
For a more in-depth tutorial about Keras, you can check out:
|
||||
|
||||
In the [examples folder](https://github.com/fchollet/keras/tree/master/examples) of the repo, you will find more advanced models: question-answering with memory networks, text generation with stacked LSTMs, neural turing machines, etc.
|
||||
- [Getting started with the Sequential model](http://keras.io/getting-started/sequential-model-guide)
|
||||
- [Getting started with the functional API](http://keras.io/getting-started/functional-api-guide)
|
||||
|
||||
In the [examples folder](https://github.com/fchollet/keras/tree/master/examples) of the repository, you will find more advanced models: question-answering with memory networks, text generation with stacked LSTMs, etc.
|
||||
|
||||
------------------
|
||||
|
||||
@@ -112,11 +115,6 @@ Keras uses the following dependencies:
|
||||
- Theano
|
||||
- [See installation instructions](http://deeplearning.net/software/theano/install.html#install).
|
||||
|
||||
**Note**: You should use the latest version of Theano, not the PyPI version. Install it with:
|
||||
```
|
||||
sudo pip install git+git://github.com/Theano/Theano.git
|
||||
```
|
||||
|
||||
*When using the TensorFlow backend:*
|
||||
|
||||
- TensorFlow
|
||||
|
||||
+28
-1
@@ -1,7 +1,7 @@
|
||||
|
||||
## Usage of initializations
|
||||
|
||||
Initializations define the probability distribution used to set the initial random weights of Keras layers.
|
||||
Initializations define the way to set the initial random weights of Keras layers.
|
||||
|
||||
The keyword arguments used for passing initializations to layers will depend on the layer. Usually it is simply `init`:
|
||||
|
||||
@@ -21,3 +21,30 @@ model.add(Dense(64, init='uniform'))
|
||||
- __glorot_uniform__
|
||||
- __he_normal__: Gaussian initialization scaled by fan_in (He et al., 2014)
|
||||
- __he_uniform__
|
||||
|
||||
|
||||
An initialization may be passed as a string (must match one of the available initializations above), or as a callable.
|
||||
If a callable, then it must take two arguments: `shape` (shape of the variable to initialize) and `name` (name of the variable),
|
||||
and it must return a variable (e.g. output of `K.variable()`):
|
||||
|
||||
```python
|
||||
from keras import backend as K
|
||||
import numpy as np
|
||||
|
||||
def my_init(shape, name=None):
|
||||
value = np.random.random(shape)
|
||||
return K.variable(value, name=name)
|
||||
|
||||
model.add(Dense(64, init=my_init))
|
||||
```
|
||||
|
||||
You could also use functions from `keras.initializations` in this way:
|
||||
|
||||
```python
|
||||
from keras import initializations
|
||||
|
||||
def my_init(shape, name=None):
|
||||
return initializations.normal(shape, scale=0.01, name=name)
|
||||
|
||||
model.add(Dense(64, init=my_init))
|
||||
```
|
||||
@@ -0,0 +1,27 @@
|
||||
# About Keras layers
|
||||
|
||||
All Keras layers have a number of methods in common:
|
||||
|
||||
- `layer.get_weights()`: returns the weights of the layer as a list of Numpy arrays.
|
||||
- `layer.set_weights(weights)`: sets the weights of the layer from a list of Numpy arrays (with the same shapes as the output of `get_weights`).
|
||||
- `layer.get_config()`: returns a dictionary containing the configuration of the layer. The layer can be reinstantiated from its config via:
|
||||
```python
|
||||
from keras.utils.layer_utils import layer_from_config
|
||||
|
||||
config = layer.get_config()
|
||||
layer = layer_from_config(config)
|
||||
```
|
||||
|
||||
If a layer has a single node (i.e. if it isn't a shared layer), you can get its input tensor, output tensor, input shape and output shape via:
|
||||
|
||||
- `layer.input`
|
||||
- `layer.output`
|
||||
- `layer.input_shape`
|
||||
- `layer.output_shape`
|
||||
|
||||
If the layer has multiple nodes (see: [the concept of layer node and shared layers](/getting-started/functional-api-guide/#the-concept-of-layer-node)), you can use the following methods:
|
||||
|
||||
- `layer.get_input_at(node_index)`
|
||||
- `layer.get_output_at(node_index)`
|
||||
- `layer.get_input_shape_at(node_index)`
|
||||
- `layer.get_output_shape_at(node_index)`
|
||||
@@ -0,0 +1,34 @@
|
||||
# Writing your own Keras layers
|
||||
|
||||
For simple, stateless custom operations, you are probably better off using `layers.core.Lambda` layers. But for any custom operation that has trainable weights, you should implement your own layer.
|
||||
|
||||
Here is the skeleton of a Keras layer. There are only three methods you need to implement:
|
||||
|
||||
- `build(input_shape)`: this is where you will define your weights. Trainable weights should be added to the list `self.trainable_weights`. Other attributes of note are: `self.non_trainable_weights` (list) and `self.updates` (list of update tuples (tensor, new_tensor)). For an example of how to use `non_trainable_weights` and `updates`, see the code for the `BatchNormalization` layer.
|
||||
- `call(x)`: this is where the layer's logic lives. Unless you want your layer to support masking, you only have to care about the first argument passed to `call`: the input tensor.
|
||||
- `get_output_shape_for(input_shape)`: in case your layer modifies the shape of its input, you should specify here the shape transformation logic. This allows Keras to do automatic shape inference.
|
||||
|
||||
```python
|
||||
from keras import backend as K
|
||||
from keras.engine.topology import Layer
|
||||
import numpy as np
|
||||
|
||||
class MyLayer(Layer):
|
||||
def __init__(self, output_dim, **kwargs):
|
||||
self.output_dim = output_dim
|
||||
super(MyLayer, self).__init__(**kwargs)
|
||||
|
||||
def build(self, input_shape):
|
||||
input_dim = input_shape[1]
|
||||
initial_weight_value = np.random.random((input_dim, output_dim))
|
||||
self.W = K.variable(initial_weight_value)
|
||||
self.trainable_weights = [self.W]
|
||||
|
||||
def call(self, x, mask=None):
|
||||
return K.dot(x, self.W)
|
||||
|
||||
def get_output_shape_for(self, input_shape):
|
||||
return (input_shape[0], self.output_dim)
|
||||
```
|
||||
|
||||
The existing Keras layers provide ample examples of how to implement almost anything. Never hesitate to read the source code!
|
||||
externo
-114
@@ -1,114 +0,0 @@
|
||||
Keras has two models: __Sequential__, a linear stack of layers, and __Graph__, a directed acyclic graph of layers.
|
||||
|
||||
# Using the Sequential model
|
||||
|
||||
```python
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Activation
|
||||
from keras.optimizers import SGD
|
||||
|
||||
model = Sequential()
|
||||
model.add(Dense(2, init='uniform', input_dim=64))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
model.compile(optimizer='sgd', loss='mse')
|
||||
|
||||
'''
|
||||
Train the model for 3 epochs, in batches of 16 samples,
|
||||
on data stored in the Numpy array X_train,
|
||||
and labels stored in the Numpy array y_train:
|
||||
'''
|
||||
model.fit(X_train, y_train, nb_epoch=3, batch_size=16, verbose=1)
|
||||
'''
|
||||
What you will see with mode verbose=1:
|
||||
Train on 37800 samples, validate on 4200 samples
|
||||
Epoch 0
|
||||
37800/37800 [==============================] - 7s - loss: 0.0385
|
||||
Epoch 1
|
||||
37800/37800 [==============================] - 8s - loss: 0.0140
|
||||
Epoch 2
|
||||
10960/37800 [=======>......................] - ETA: 4s - loss: 0.0109
|
||||
'''
|
||||
|
||||
model.fit(X_train, y_train, nb_epoch=3, batch_size=16, verbose=2)
|
||||
'''
|
||||
What you will see with mode verbose=2:
|
||||
Train on 37800 samples, validate on 4200 samples
|
||||
Epoch 0
|
||||
loss: 0.0190
|
||||
Epoch 1
|
||||
loss: 0.0146
|
||||
Epoch 2
|
||||
loss: 0.0049
|
||||
'''
|
||||
|
||||
'''
|
||||
Demonstration of the show_accuracy argument
|
||||
'''
|
||||
model.fit(X_train, y_train, nb_epoch=3, batch_size=16, verbose=2, show_accuracy=True)
|
||||
'''
|
||||
Train on 37800 samples, validate on 4200 samples
|
||||
Epoch 0
|
||||
loss: 0.0190 - acc.: 0.8750
|
||||
Epoch 1
|
||||
loss: 0.0146 - acc.: 0.8750
|
||||
Epoch 2
|
||||
loss: 0.0049 - acc.: 1.0000
|
||||
'''
|
||||
|
||||
'''
|
||||
Demonstration of the validation_split argument
|
||||
'''
|
||||
model.fit(X_train, y_train, nb_epoch=3, batch_size=16,
|
||||
validation_split=0.1, show_accuracy=True, verbose=1)
|
||||
'''
|
||||
Train on 37800 samples, validate on 4200 samples
|
||||
Epoch 0
|
||||
37800/37800 [==============================] - 7s - loss: 0.0385 - acc.: 0.7258 - val. loss: 0.0160 - val. acc.: 0.9136
|
||||
Epoch 1
|
||||
37800/37800 [==============================] - 8s - loss: 0.0140 - acc.: 0.9265 - val. loss: 0.0109 - val. acc.: 0.9383
|
||||
Epoch 2
|
||||
10960/37800 [=======>......................] - ETA: 4s - loss: 0.0109 - acc.: 0.9420
|
||||
'''
|
||||
```
|
||||
|
||||
# Using the Graph model
|
||||
|
||||
```python
|
||||
# graph model with one input and two outputs
|
||||
graph = Graph()
|
||||
graph.add_input(name='input', input_shape=(32,))
|
||||
graph.add_node(Dense(16), name='dense1', input='input')
|
||||
graph.add_node(Dense(4), name='dense2', input='input')
|
||||
graph.add_node(Dense(4), name='dense3', input='dense1')
|
||||
graph.add_output(name='output1', input='dense2')
|
||||
graph.add_output(name='output2', input='dense3')
|
||||
|
||||
graph.compile(optimizer='rmsprop', loss={'output1':'mse', 'output2':'mse'})
|
||||
history = graph.fit({'input':X_train, 'output1':y_train, 'output2':y2_train}, nb_epoch=10)
|
||||
|
||||
```
|
||||
|
||||
```python
|
||||
# graph model with two inputs and one output
|
||||
graph = Graph()
|
||||
graph.add_input(name='input1', input_shape=(32,))
|
||||
graph.add_input(name='input2', input_shape=(32,))
|
||||
graph.add_node(Dense(16), name='dense1', input='input1')
|
||||
graph.add_node(Dense(4), name='dense2', input='input2')
|
||||
graph.add_node(Dense(4), name='dense3', input='dense1')
|
||||
graph.add_output(name='output', inputs=['dense2', 'dense3'], merge_mode='sum')
|
||||
graph.compile(optimizer='rmsprop', loss={'output':'mse'})
|
||||
|
||||
history = graph.fit({'input1':X_train, 'input2':X2_train, 'output':y_train}, nb_epoch=10)
|
||||
predictions = graph.predict({'input1':X_test, 'input2':X2_test}) # {'output':...}
|
||||
|
||||
```
|
||||
|
||||
----
|
||||
|
||||
# Model API documentation
|
||||
|
||||
|
||||
|
||||
{{autogenerated}}
|
||||
@@ -0,0 +1,33 @@
|
||||
# About Keras models
|
||||
|
||||
There are two types of models available in Keras: [the Sequential model](/models/sequential) and [the Model class used with functional API](/models/model).
|
||||
|
||||
These models have a number of methods in common:
|
||||
|
||||
- `model.summary()`: prints a summary representation of your model.
|
||||
- `model.get_config()`: returns a dictionary containing the configuration of the model. The model can be reinstantiated from its config via:
|
||||
```python
|
||||
config = model.get_config()
|
||||
model = Model.from_config(config)
|
||||
# or, for Sequential:
|
||||
model = Sequential.from_config(config)
|
||||
```
|
||||
|
||||
- `model.get_weights()`: returns a list of all weight tensors in the model, as Numpy arrays.
|
||||
- `model.set_weights(weights)`: sets the values of the weights of the model, from a list of Numpy arrays. The arrays in the list should have the same shape as those returned by `get_weights()`.
|
||||
- `model.to_json()`: returns a representation of the model as a JSON string. Note that the representation does not include the weights, only the architecture. You can reinstantiate the same model (with reinitialized weights) from the JSON string via:
|
||||
```python
|
||||
from models import model_from_json
|
||||
|
||||
json_string = model.to_json()
|
||||
model = model_from_json(json_string)
|
||||
```
|
||||
- `model.to_yaml()`: returns a representation of the model as a YAML string. Note that the representation does not include the weights, only the architecture. You can reinstantiate the same model (with reinitialized weights) from the YAML string via:
|
||||
```python
|
||||
from models import model_from_yaml
|
||||
|
||||
yaml_string = model.to_yaml()
|
||||
model = model_from_yaml(yaml_string)
|
||||
```
|
||||
- `model.save_weights(filepath)`: saves the weights of the model as a HDF5 file.
|
||||
- `model.load_weights(filepath)`: loads the weights of the model from a HDF5 file (created by `save_weights`).
|
||||
externo
+32
@@ -0,0 +1,32 @@
|
||||
# Model class API
|
||||
|
||||
In the functional API, given an input tensor and output tensor, you can instantiate a `Model` via:
|
||||
|
||||
```python
|
||||
from keras.models import Model
|
||||
from keras.layers import Input, Dense
|
||||
|
||||
a = Input(shape=(32,))
|
||||
b = Dense(32)(a)
|
||||
model = Model(input=a, output=b)
|
||||
```
|
||||
|
||||
This model will include all layers required in the computation of `b` given `a`.
|
||||
|
||||
In the case of multi-input or multi-output models, you can use lists as well:
|
||||
|
||||
```python
|
||||
model = Model(input=[a1, a2], output=[b1, b3, b3])
|
||||
```
|
||||
|
||||
For a detailed introduction of what `Model` can do, read [this guide to the Keras functional API](/getting-started/functional-api-guide).
|
||||
|
||||
## Useful attributes of Model
|
||||
|
||||
- `model.layers` is a flattened list of the layers comprising the model graph.
|
||||
- `model.inputs` is the list of input tensors.
|
||||
- `model.outputs` is the list of output tensors.
|
||||
|
||||
## Methods
|
||||
|
||||
{{autogenerated}}
|
||||
+14
@@ -0,0 +1,14 @@
|
||||
# The Sequential model API
|
||||
|
||||
To get started, read [this guide to the Keras Sequential model](/getting-started/sequential-model-guide).
|
||||
|
||||
## Useful attributes of Model
|
||||
|
||||
- `model.layers` is a list of the layers added to the model.
|
||||
|
||||
|
||||
----
|
||||
|
||||
## Sequential model methods
|
||||
|
||||
{{autogenerated}}
|
||||
externo
+4
-2
@@ -26,5 +26,7 @@ For a few examples of such functions, check out the [objectives source](https://
|
||||
- __hinge__
|
||||
- __binary_crossentropy__: Also known as logloss.
|
||||
- __categorical_crossentropy__: Also known as multiclass logloss. __Note__: using this objective requires that your labels are binary arrays of shape `(nb_samples, nb_classes)`.
|
||||
- __poisson__: mean of `(predictions - targets * log(predictions))`
|
||||
- __cosine_proximity__: the opposite (negative) of the mean cosine proximity between predictions and targets.
|
||||
- __sparse_categorical_crossentropy__: As above but accepts sparse labels. __Note__: this objective still requires that your labels have the same number of dimensions as your outputs; you may need to add a length-1 dimension to the shape of your labels, e.g with `np.expand_dims(y, -1)`.
|
||||
- __kullback_leibler_divergence__ / __kld__: Information gain from a predicted probability distribution Q to a true probability distribution P. Gives a measure of difference between both distributions.
|
||||
- __poisson__: Mean of `(predictions - targets * log(predictions))`
|
||||
- __cosine_proximity__: The opposite (negative) of the mean cosine proximity between predictions and targets.
|
||||
|
||||
externo
+20
-1
@@ -9,7 +9,7 @@ model.add(Dense(64, init='uniform', input_dim=10))
|
||||
model.add(Activation('tanh'))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
sgd = SGD(lr=0.1, decay=1e-6, momentum=0.9, nesterov=True)
|
||||
sgd = SGD(lr=0.01, decay=1e-6, momentum=0.9, nesterov=True)
|
||||
model.compile(loss='mean_squared_error', optimizer=sgd)
|
||||
```
|
||||
|
||||
@@ -22,4 +22,23 @@ model.compile(loss='mean_squared_error', optimizer='sgd')
|
||||
|
||||
---
|
||||
|
||||
## Parameters common to all Keras optimizers
|
||||
|
||||
The parameters `clipnorm` and `clipvalue` can be used with all optimizers to control gradient clipping:
|
||||
|
||||
```python
|
||||
# all parameter gradients will be clipped to
|
||||
# a maximum norm of 1.
|
||||
sgd = SGD(lr=0.01, clipnorm=1.)
|
||||
```
|
||||
|
||||
```python
|
||||
# all parameter gradients will be clipped to
|
||||
# a maximum value of 0.5 and
|
||||
# a minimum value of -0.5.
|
||||
sgd = SGD(lr=0.01, clipvalue=0.5)
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
{{autogenerated}}
|
||||
+81
-10
@@ -2,17 +2,23 @@
|
||||
## ImageDataGenerator
|
||||
|
||||
```python
|
||||
keras.preprocessing.image.ImageDataGenerator(featurewise_center=True,
|
||||
keras.preprocessing.image.ImageDataGenerator(featurewise_center=False,
|
||||
samplewise_center=False,
|
||||
featurewise_std_normalization=True,
|
||||
featurewise_std_normalization=False,
|
||||
samplewise_std_normalization=False,
|
||||
zca_whitening=False,
|
||||
rotation_range=0.,
|
||||
width_shift_range=0.,
|
||||
height_shift_range=0.,
|
||||
shear_range=0.,
|
||||
zoom_range=0.,
|
||||
channel_shift_range=0.,
|
||||
fill_mode='nearest',
|
||||
cval=0.,
|
||||
horizontal_flip=False,
|
||||
vertical_flip=False)
|
||||
vertical_flip=False,
|
||||
rescale=None,
|
||||
dim_ordering=K.image_dim_ordering())
|
||||
```
|
||||
|
||||
Generate batches of tensor image data with real-time data augmentation. The data will be looped over (in batches) indefinitely.
|
||||
@@ -27,28 +33,62 @@ Generate batches of tensor image data with real-time data augmentation. The data
|
||||
- __width_shift_range__: Float (fraction of total width). Range for random horizontal shifts.
|
||||
- __height_shift_range__: Float (fraction of total height). Range for random vertical shifts.
|
||||
- __shear_range__: Float. Shear Intensity (Shear angle in counter-clockwise direction as radians)
|
||||
- __zoom_range__: Float or [lower, upper]. Range for random zoom. If a float, `[lower, upper] = [1-zoom_range, 1+zoom_range]`.
|
||||
- __channel_shift_range__: Float. Range for random channel shifts.
|
||||
- __fill_mode__: One of {"constant", "nearest", "reflect" or "wrap"}. Points outside the boundaries of the input are filled according to the given mode.
|
||||
- __cval__: Float or Int. Value used for points outside the boundaries when `fill_mode = "constant"`.
|
||||
- __horizontal_flip__: Boolean. Randomly flip inputs horizontally.
|
||||
- __vertical_flip__: Boolean. Randomly flip inputs vertically.
|
||||
- __rescale__: rescaling factor. Defaults to None. If None or 0, no rescaling is applied,
|
||||
otherwise we multiply the data by the value provided (before applying
|
||||
any other transformation).
|
||||
- __dim_ordering__: One of {"th", "tf"}.
|
||||
"tf" mode means that the images should have shape `(samples, width, height, channels)`,
|
||||
"th" mode means that the images should have shape `(samples, channels, width, height)`.
|
||||
It defaults to the `image_dim_ordering` value found in your
|
||||
Keras config file at `~/.keras/keras.json`.
|
||||
If you never set it, then it will be "th".
|
||||
|
||||
- __Methods__:
|
||||
- __fit(X)__: Required if featurewise_center or featurewise_std_normalization or zca_whitening. Compute necessary quantities on some sample data.
|
||||
- __fit(X)__: Compute the internal data stats related to the data-dependent transformations, based on an array of sample data.
|
||||
Only required if featurewise_center or featurewise_std_normalization or zca_whitening.
|
||||
- __Arguments__:
|
||||
- __X__: sample data.
|
||||
- __augment__: Boolean (default: False). Whether to fit on randomly augmented samples.
|
||||
- __rounds__: int (default: 1). If augment, how many augmentation passes over the data to use.
|
||||
- __flow(X, y)__:
|
||||
- __flow(X, y)__: Takes numpy data & label arrays, and generates batches of augmented/normalized data. Yields batches indefinitely, in an infinite loop.
|
||||
- __Arguments__:
|
||||
- __X__: data.
|
||||
- __y__: labels.
|
||||
- __batch_size__: int (default: 32).
|
||||
- __shuffle__: boolean (defaut: False).
|
||||
- __save_to_dir__: None or str. This allows you to optimally specify a directory to which to save the augmented pictures being generated (useful for visualizing what you are doing).
|
||||
- __save_prefix__: str. Prefix to use for filenames of saved pictures.
|
||||
- __save_format__: one of "png", jpeg".
|
||||
- __save_to_dir__: None or str (default: None). This allows you to optimally specify a directory to which to save the augmented pictures being generated (useful for visualizing what you are doing).
|
||||
- __save_prefix__: str (default: `''`). Prefix to use for filenames of saved pictures (only relevant if `save_to_dir` is set).
|
||||
- __save_format__: one of "png", "jpeg" (only relevant if `save_to_dir` is set). Default: "jpeg".
|
||||
- ___yields__: Tuples of `(x, y)` where `x` is a numpy array of image data and `y` is a numpy array of corresponding labels.
|
||||
The generator loops indefinitely.
|
||||
- __flow_from_directory(directory)__: Takes the path to a directory, and generates batches of augmented/normalized data. Yields batches indefinitely, in an infinite loop.
|
||||
- __Arguments__:
|
||||
- __directory: path to the target directory. It should contain one subdirectory per class,
|
||||
and the subdirectories should contain PNG or JPG images. See [this script](https://gist.github.com/fchollet/0830affa1f7f19fd47b06d4cf89ed44d) for more details.
|
||||
- __target_size__: tuple of integers, default: `(256, 256)`. The dimensions to which all images found will be resized.
|
||||
- __color_mode__: one of "grayscale", "rbg". Default: "rgb". Whether the images will be converted to have 1 or 3 color channels.
|
||||
- __classes__: optional list of class subdirectories (e.g. `['dogs', 'cats']`). Default: None. If not provided, the list of classes will be automatically inferred (and the order of the classes, which will map to the label indices, will be alphanumeric).
|
||||
- __class_mode__: one of "categorical", "binary", "sparse" or None. Default: "categorical". Determines the type of label arrays that are returned: "categorical" will be 2D one-hot encoded labels, "binary" will be 1D binary labels, "sparse" will be 1D integer labels. If None, no labels are returned (the generator will only yield batches of image data, which is useful to use `model.predict_generator()`, `model.evaluate_generator()`, etc.).
|
||||
- __batch_size__: size of the batches of data (default: 32).
|
||||
- __shuffle__: whether to shuffle the data (default: True)
|
||||
- __seed__: optional random seed for shuffling.
|
||||
- __save_to_dir__: None or str (default: None). This allows you to optimally specify a directory to which to save the augmented pictures being generated (useful for visualizing what you are doing).
|
||||
- __save_prefix__: str. Prefix to use for filenames of saved pictures (only relevant if `save_to_dir` is set).
|
||||
- __save_format__: one of "png", "jpeg" (only relevant if `save_to_dir` is set). Default: "jpeg".
|
||||
|
||||
|
||||
- __Examples__:
|
||||
|
||||
Example of using `.flow(X, y)`:
|
||||
|
||||
- __Example__:
|
||||
```python
|
||||
(X_train, y_train), (X_test, y_test) = cifar10.load_data(test_split=0.1)
|
||||
(X_train, y_train), (X_test, y_test) = cifar10.load_data()
|
||||
Y_train = np_utils.to_categorical(y_train, nb_classes)
|
||||
Y_test = np_utils.to_categorical(y_test, nb_classes)
|
||||
|
||||
@@ -80,3 +120,34 @@ for e in range(nb_epoch):
|
||||
# the generator loops indefinitely
|
||||
break
|
||||
```
|
||||
|
||||
Example of using `.flow_from_directory(directory)`:
|
||||
|
||||
```python
|
||||
train_datagen = ImageDataGenerator(
|
||||
rescale=1./255,
|
||||
shear_range=0.2,
|
||||
zoom_range=0.2,
|
||||
horizontal_flip=True)
|
||||
|
||||
test_datagen = ImageDataGenerator(rescale=1./255)
|
||||
|
||||
train_generator = train_datagen.flow_from_directory(
|
||||
'data/train',
|
||||
target_size=(150, 150),
|
||||
batch_size=32,
|
||||
class_mode='binary')
|
||||
|
||||
validation_generator = test_datagen.flow_from_directory(
|
||||
'data/validation',
|
||||
target_size=(150, 150),
|
||||
batch_size=32,
|
||||
class_mode='binary')
|
||||
|
||||
model.fit_generator(
|
||||
train_generator,
|
||||
samples_per_epoch=2000,
|
||||
nb_epoch=50,
|
||||
validation_data=validation_generator,
|
||||
nb_val_samples=800)
|
||||
```
|
||||
|
||||
+10
-10
@@ -4,14 +4,14 @@
|
||||
keras.preprocessing.sequence.pad_sequences(sequences, maxlen=None, dtype='int32')
|
||||
```
|
||||
|
||||
Transform a list of `nb_samples sequences` (lists of scalars) into a 2D numpy array of shape `(nb_samples, nb_timesteps)`. `nb_timesteps` is either the `maxlen` argument if provided, or the length of the longest sequence otherwise. Sequences that are shorter than `nb_timesteps` are padded with zeros at the end.
|
||||
Transform a list of `nb_samples sequences` (lists of scalars) into a 2D Numpy array of shape `(nb_samples, nb_timesteps)`. `nb_timesteps` is either the `maxlen` argument if provided, or the length of the longest sequence otherwise. Sequences that are shorter than `nb_timesteps` are padded with zeros at the end.
|
||||
|
||||
- __Return__: 2D numpy array of shape `(nb_samples, nb_timesteps)`.
|
||||
- __Return__: 2D Numpy array of shape `(nb_samples, nb_timesteps)`.
|
||||
|
||||
- __Arguments__:
|
||||
- __sequences__: List of lists of int or float.
|
||||
- __maxlen__: None or int. Maximum sequence length, longer sequences are truncated and shorter sequences are padded with zeros at the end.
|
||||
- __dtype__: datatype of the numpy array returned.
|
||||
- __dtype__: datatype of the Numpy array returned.
|
||||
- __padding__: 'pre' or 'post', pad either before or after each sequence.
|
||||
- __truncating__: 'pre' or 'post', remove values from sequences larger than maxlen either in the beginning or in the end of the sequence
|
||||
- __value__: float, value to pad the sequences to the desired value.
|
||||
@@ -21,12 +21,12 @@ Transform a list of `nb_samples sequences` (lists of scalars) into a 2D numpy ar
|
||||
## skipgrams
|
||||
|
||||
```python
|
||||
keras.preprocessing.sequence.skipgrams(sequence, vocabulary_size,
|
||||
window_size=4, negative_samples=1., shuffle=True,
|
||||
keras.preprocessing.sequence.skipgrams(sequence, vocabulary_size,
|
||||
window_size=4, negative_samples=1., shuffle=True,
|
||||
categorical=False, sampling_table=None)
|
||||
```
|
||||
|
||||
Transforms a sequence of word indexes (list of int) into couples of the form:
|
||||
Transforms a sequence of word indexes (list of int) into couples of the form:
|
||||
|
||||
- (word, word in the same window), with label 1 (positive samples).
|
||||
- (word, random word from the vocabulary), with label 0 (negative samples).
|
||||
@@ -34,8 +34,8 @@ Transforms a sequence of word indexes (list of int) into couples of the form:
|
||||
Read more about Skipgram in this gnomic paper by Mikolov et al.: [Efficient Estimation of Word Representations in
|
||||
Vector Space](http://arxiv.org/pdf/1301.3781v3.pdf)
|
||||
|
||||
- __Return__: tuple `(couples, labels)`.
|
||||
- `couples` is a list of 2-elements lists of int: `[word_index, other_word_index]`.
|
||||
- __Return__: tuple `(couples, labels)`.
|
||||
- `couples` is a list of 2-elements lists of int: `[word_index, other_word_index]`.
|
||||
- `labels` is a list of 0 and 1, where 1 indicates that `other_word_index` was found in the same window as `word_index`, and 0 indicates that `other_word_index` was random.
|
||||
- if categorical is set to True, the labels are categorical, ie. 1 becomes [0,1], and 0 becomes [1, 0].
|
||||
|
||||
@@ -46,7 +46,7 @@ Vector Space](http://arxiv.org/pdf/1301.3781v3.pdf)
|
||||
- __negative_samples__: float >= 0. 0 for no negative (=random) samples. 1 for same number as positive samples. etc.
|
||||
- __shuffle__: boolean. Whether to shuffle the samples.
|
||||
- __categorical__: boolean. Whether to make the returned labels categorical.
|
||||
- __sampling_table__: numpy array of shape `(vocabulary_size,)` where `sampling_table[i]` is the probability of sampling the word with index i (assumed to be i-th most common word in the dataset).
|
||||
- __sampling_table__: Numpy array of shape `(vocabulary_size,)` where `sampling_table[i]` is the probability of sampling the word with index i (assumed to be i-th most common word in the dataset).
|
||||
|
||||
|
||||
---
|
||||
@@ -59,7 +59,7 @@ keras.preprocessing.sequence.make_sampling_table(size, sampling_factor=1e-5)
|
||||
|
||||
Used for generating the `sampling_table` argument for `skipgrams`. `sampling_table[i]` is the probability of sampling the word i-th most common word in a dataset (more common words should be sampled less frequently, for balance).
|
||||
|
||||
- __Return__: numpy array of shape `(size,)`.
|
||||
- __Return__: Numpy array of shape `(size,)`.
|
||||
|
||||
- __Arguments__:
|
||||
- __size__: size of the vocabulary considered.
|
||||
|
||||
+45
@@ -0,0 +1,45 @@
|
||||
# Wrappers for the Scikit-Learn API
|
||||
|
||||
You can use `Sequential` Keras models (single-input only) as part of your Scikit-Learn workflow via the wrappers found at `keras.wrappers.scikit_learn.py`.
|
||||
|
||||
There are two wrappers available:
|
||||
|
||||
`keras.wrappers.scikit_learn.KerasClassifier(build_fn=None, **sk_params)`, which implements the Scikit-Learn classifier interface,
|
||||
|
||||
`keras.wrappers.scikit_learn.KerasRegressor(build_fn=None, **sk_params)`, which implements the Scikit-Learn regressor interface.
|
||||
|
||||
### Arguments
|
||||
|
||||
- __build_fn__: callable function or class instance
|
||||
- __sk_params__: model parameters & fitting parameters
|
||||
|
||||
`build_fn` should construct, compile and return a Keras model, which
|
||||
will then be used to fit/predict. One of the following
|
||||
three values could be passed to build_fn:
|
||||
|
||||
1. A function
|
||||
2. An instance of a class that implements the __call__ method
|
||||
3. None. This means you implement a class that inherits from either
|
||||
`KerasClassifier` or `KerasRegressor`. The __call__ method of the
|
||||
present class will then be treated as the default build_fn.
|
||||
|
||||
`sk_params` takes both model parameters and fitting parameters. Legal model
|
||||
parameters are the arguments of `build_fn`. Note that like all other
|
||||
estimators in scikit-learn, 'build_fn' should provide default values for
|
||||
its arguments, so that you could create the estimator without passing any
|
||||
values to `sk_params`.
|
||||
|
||||
`sk_params` could also accept parameters for calling `fit`, `predict`,
|
||||
`predict_proba`, and `score` methods (e.g., `nb_epoch`, `batch_size`).
|
||||
fitting (predicting) parameters are selected in the following order:
|
||||
|
||||
1. Values passed to the dictionary arguments of
|
||||
`fit`, `predict`, `predict_proba`, and `score` methods
|
||||
2. Values passed to `sk_params`
|
||||
3. The default values of the `keras.models.Sequential`
|
||||
`fit`, `predict`, `predict_proba` and `score` methods
|
||||
|
||||
When using scikit-learn's `grid_search` API, legal tunable parameters are
|
||||
those you could pass to `sk_params`, including fitting parameters.
|
||||
In other words, you could use `grid_search` to search for the best
|
||||
`batch_size` or `nb_epoch` as well as the model parameters.
|
||||
externo
+4
-4
@@ -12,14 +12,14 @@ plot(model, to_file='model.png')
|
||||
|
||||
`plot` takes two optional arguments:
|
||||
|
||||
- `recursive` (defaults to True) controls whether we recursively explore container layers.
|
||||
- `show_shape` (defaults to False) controls whether output shapes are shown in the graph.
|
||||
- `show_shapes` (defaults to False) controls whether output shapes are shown in the graph.
|
||||
- `show_layer_names` (defaults to True) controls whether layer names are shown in the graph.
|
||||
|
||||
You can also directly obtain the `pydot.Graph` object and render it yourself,
|
||||
for example to show it in an ipython notebook :
|
||||
```python
|
||||
from IPython.display import SVG
|
||||
from keras.utils.visualize_util import to_graph
|
||||
from keras.utils.visualize_util import model_to_dot
|
||||
|
||||
SVG(to_graph(model).create(prog='dot', format='svg'))
|
||||
SVG(model_to_dot(model).create(prog='dot', format='svg'))
|
||||
```
|
||||
|
||||
@@ -27,9 +27,9 @@ Five digits inverted:
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
from keras.models import Sequential, slice_X
|
||||
from keras.layers.core import Activation, TimeDistributedDense, RepeatVector
|
||||
from keras.layers import recurrent
|
||||
from keras.models import Sequential
|
||||
from keras.engine.training import slice_X
|
||||
from keras.layers import Activation, TimeDistributed, Dense, RepeatVector, recurrent
|
||||
import numpy as np
|
||||
from six.moves import range
|
||||
|
||||
@@ -39,7 +39,7 @@ class CharacterTable(object):
|
||||
Given a set of characters:
|
||||
+ Encode them to a one hot integer representation
|
||||
+ Decode the one hot integer representation to their character output
|
||||
+ Decode a vector of probabilties to their character output
|
||||
+ Decode a vector of probabilities to their character output
|
||||
'''
|
||||
def __init__(self, chars, maxlen):
|
||||
self.chars = sorted(set(chars))
|
||||
@@ -139,10 +139,12 @@ for _ in range(LAYERS):
|
||||
model.add(RNN(HIDDEN_SIZE, return_sequences=True))
|
||||
|
||||
# For each of step of the output sequence, decide which character should be chosen
|
||||
model.add(TimeDistributedDense(len(chars)))
|
||||
model.add(TimeDistributed(Dense(len(chars))))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
model.compile(loss='categorical_crossentropy', optimizer='adam')
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='adam',
|
||||
metrics=['accuracy'])
|
||||
|
||||
# Train the model each generation and show predictions against the validation dataset
|
||||
for iteration in range(1, 200):
|
||||
@@ -150,7 +152,7 @@ for iteration in range(1, 200):
|
||||
print('-' * 50)
|
||||
print('Iteration', iteration)
|
||||
model.fit(X_train, y_train, batch_size=BATCH_SIZE, nb_epoch=1,
|
||||
validation_data=(X_val, y_val), show_accuracy=True)
|
||||
validation_data=(X_val, y_val))
|
||||
###
|
||||
# Select 10 samples from the validation set at random so we can visualize errors
|
||||
for i in range(10):
|
||||
|
||||
@@ -2,7 +2,7 @@
|
||||
|
||||
We build a custom activation layer called 'Antirectifier',
|
||||
which modifies the shape of the tensor that passes through it.
|
||||
We need to specify two methods: `output_shape` and `get_output`.
|
||||
We need to specify two methods: `get_output_shape_for` and `call`.
|
||||
|
||||
Note that the same result can also be achieved via a Lambda layer.
|
||||
|
||||
@@ -11,9 +11,8 @@ backend (`K`), our code can run both on TensorFlow and Theano.
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
import numpy as np
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Layer, Activation
|
||||
from keras.layers import Dense, Dropout, Layer, Activation
|
||||
from keras.datasets import mnist
|
||||
from keras import backend as K
|
||||
from keras.utils import np_utils
|
||||
@@ -46,15 +45,13 @@ class Antirectifier(Layer):
|
||||
with twice less parameters yet with comparable
|
||||
classification accuracy as an equivalent ReLU-based network.
|
||||
'''
|
||||
@property
|
||||
def output_shape(self):
|
||||
shape = list(self.input_shape)
|
||||
def get_output_shape_for(self, input_shape):
|
||||
shape = list(input_shape)
|
||||
assert len(shape) == 2 # only valid for 2D tensors
|
||||
shape[-1] *= 2
|
||||
return tuple(shape)
|
||||
|
||||
def get_output(self, train):
|
||||
x = self.get_input(train)
|
||||
def call(self, x, mask=None):
|
||||
x -= K.mean(x, axis=1, keepdims=True)
|
||||
x = K.l2_normalize(x, axis=1)
|
||||
pos = K.relu(x)
|
||||
@@ -94,13 +91,14 @@ model.add(Dense(10))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
# compile the model
|
||||
model.compile(loss='categorical_crossentropy', optimizer='rmsprop')
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='rmsprop',
|
||||
metrics=['accuracy'])
|
||||
|
||||
# train the model
|
||||
model.fit(X_train, Y_train,
|
||||
batch_size=batch_size, nb_epoch=nb_epoch,
|
||||
show_accuracy=True, verbose=1,
|
||||
validation_data=(X_test, Y_test))
|
||||
verbose=1, validation_data=(X_test, Y_test))
|
||||
|
||||
# next, compare with an equivalent network
|
||||
# with2x bigger Dense layers and ReLU
|
||||
|
||||
@@ -1,4 +1,4 @@
|
||||
'''Train a memory network on the bAbI dataset.
|
||||
'''Trains a memory network on the bAbI dataset.
|
||||
|
||||
References:
|
||||
- Jason Weston, Antoine Bordes, Sumit Chopra, Tomas Mikolov, Alexander M. Rush,
|
||||
@@ -16,8 +16,8 @@ Time per epoch: 3s on CPU (core i7).
|
||||
from __future__ import print_function
|
||||
from keras.models import Sequential
|
||||
from keras.layers.embeddings import Embedding
|
||||
from keras.layers.core import Activation, Dense, Merge, Permute, Dropout
|
||||
from keras.layers.recurrent import LSTM
|
||||
from keras.layers import Activation, Dense, Merge, Permute, Dropout
|
||||
from keras.layers import LSTM
|
||||
from keras.utils.data_utils import get_file
|
||||
from keras.preprocessing.sequence import pad_sequences
|
||||
from functools import reduce
|
||||
@@ -94,8 +94,13 @@ def vectorize_stories(data, word_idx, story_maxlen, query_maxlen):
|
||||
pad_sequences(Xq, maxlen=query_maxlen), np.array(Y))
|
||||
|
||||
|
||||
path = get_file('babi-tasks-v1-2.tar.gz',
|
||||
origin='http://www.thespermwhale.com/jaseweston/babi/tasks_1-20_v1-2.tar.gz')
|
||||
try:
|
||||
path = get_file('babi-tasks-v1-2.tar.gz', origin='http://www.thespermwhale.com/jaseweston/babi/tasks_1-20_v1-2.tar.gz')
|
||||
except:
|
||||
print('Error downloading dataset, please download it manually:\n'
|
||||
'$ wget http://www.thespermwhale.com/jaseweston/babi/tasks_1-20_v1-2.tar.gz\n'
|
||||
'$ mv tasks_1-20_v1-2.tar.gz ~/.keras/datasets/babi-tasks-v1-2.tar.gz')
|
||||
raise
|
||||
tar = tarfile.open(path)
|
||||
|
||||
challenges = {
|
||||
@@ -167,7 +172,7 @@ question_encoder.add(Dropout(0.3))
|
||||
match = Sequential()
|
||||
match.add(Merge([input_encoder_m, question_encoder],
|
||||
mode='dot',
|
||||
dot_axes=[(2,), (2,)]))
|
||||
dot_axes=[2, 2]))
|
||||
# output: (samples, story_maxlen, query_maxlen)
|
||||
# embed the input into a single vector with size = story_maxlen:
|
||||
input_encoder_c = Sequential()
|
||||
@@ -195,10 +200,10 @@ answer.add(Dense(vocab_size))
|
||||
# we output a probability distribution over the vocabulary
|
||||
answer.add(Activation('softmax'))
|
||||
|
||||
answer.compile(optimizer='rmsprop', loss='categorical_crossentropy')
|
||||
answer.compile(optimizer='rmsprop', loss='categorical_crossentropy',
|
||||
metrics=['accuracy'])
|
||||
# Note: you could use a Graph model to avoid repeat the input twice
|
||||
answer.fit([inputs_train, queries_train, inputs_train], answers_train,
|
||||
batch_size=32,
|
||||
nb_epoch=120,
|
||||
show_accuracy=True,
|
||||
validation_data=([inputs_test, queries_test, inputs_test], answers_test))
|
||||
|
||||
+17
-7
@@ -66,7 +66,7 @@ np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.utils.data_utils import get_file
|
||||
from keras.layers.embeddings import Embedding
|
||||
from keras.layers.core import Dense, Merge, Dropout, RepeatVector
|
||||
from keras.layers import Dense, Merge, Dropout, RepeatVector
|
||||
from keras.layers import recurrent
|
||||
from keras.models import Sequential
|
||||
from keras.preprocessing.sequence import pad_sequences
|
||||
@@ -146,7 +146,13 @@ BATCH_SIZE = 32
|
||||
EPOCHS = 40
|
||||
print('RNN / Embed / Sent / Query = {}, {}, {}, {}'.format(RNN, EMBED_HIDDEN_SIZE, SENT_HIDDEN_SIZE, QUERY_HIDDEN_SIZE))
|
||||
|
||||
path = get_file('babi-tasks-v1-2.tar.gz', origin='http://www.thespermwhale.com/jaseweston/babi/tasks_1-20_v1-2.tar.gz')
|
||||
try:
|
||||
path = get_file('babi-tasks-v1-2.tar.gz', origin='http://www.thespermwhale.com/jaseweston/babi/tasks_1-20_v1-2.tar.gz')
|
||||
except:
|
||||
print('Error downloading dataset, please download it manually:\n'
|
||||
'$ wget http://www.thespermwhale.com/jaseweston/babi/tasks_1-20_v1-2.tar.gz\n'
|
||||
'$ mv tasks_1-20_v1-2.tar.gz ~/.keras/datasets/babi-tasks-v1-2.tar.gz')
|
||||
raise
|
||||
tar = tarfile.open(path)
|
||||
# Default QA1 with 1000 samples
|
||||
# challenge = 'tasks_1-20_v1-2/en/qa1_single-supporting-fact_{}.txt'
|
||||
@@ -178,11 +184,13 @@ print('story_maxlen, query_maxlen = {}, {}'.format(story_maxlen, query_maxlen))
|
||||
print('Build model...')
|
||||
|
||||
sentrnn = Sequential()
|
||||
sentrnn.add(Embedding(vocab_size, EMBED_HIDDEN_SIZE, input_length=story_maxlen, mask_zero=True))
|
||||
sentrnn.add(Embedding(vocab_size, EMBED_HIDDEN_SIZE,
|
||||
input_length=story_maxlen))
|
||||
sentrnn.add(Dropout(0.3))
|
||||
|
||||
qrnn = Sequential()
|
||||
qrnn.add(Embedding(vocab_size, EMBED_HIDDEN_SIZE, input_length=query_maxlen))
|
||||
qrnn.add(Embedding(vocab_size, EMBED_HIDDEN_SIZE,
|
||||
input_length=query_maxlen))
|
||||
qrnn.add(Dropout(0.3))
|
||||
qrnn.add(RNN(EMBED_HIDDEN_SIZE, return_sequences=False))
|
||||
qrnn.add(RepeatVector(story_maxlen))
|
||||
@@ -193,9 +201,11 @@ model.add(RNN(EMBED_HIDDEN_SIZE, return_sequences=False))
|
||||
model.add(Dropout(0.3))
|
||||
model.add(Dense(vocab_size, activation='softmax'))
|
||||
|
||||
model.compile(optimizer='adam', loss='categorical_crossentropy', class_mode='categorical')
|
||||
model.compile(optimizer='adam',
|
||||
loss='categorical_crossentropy',
|
||||
metrics=['accuracy'])
|
||||
|
||||
print('Training')
|
||||
model.fit([X, Xq], Y, batch_size=BATCH_SIZE, nb_epoch=EPOCHS, validation_split=0.05, show_accuracy=True)
|
||||
loss, acc = model.evaluate([tX, tXq], tY, batch_size=BATCH_SIZE, show_accuracy=True)
|
||||
model.fit([X, Xq], Y, batch_size=BATCH_SIZE, nb_epoch=EPOCHS, validation_split=0.05)
|
||||
loss, acc = model.evaluate([tX, tXq], tY, batch_size=BATCH_SIZE)
|
||||
print('Test loss / test accuracy = {:.4f} / {:.4f}'.format(loss, acc))
|
||||
|
||||
+14
-10
@@ -15,8 +15,8 @@ from __future__ import print_function
|
||||
from keras.datasets import cifar10
|
||||
from keras.preprocessing.image import ImageDataGenerator
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Activation, Flatten
|
||||
from keras.layers.convolutional import Convolution2D, MaxPooling2D
|
||||
from keras.layers import Dense, Dropout, Activation, Flatten
|
||||
from keras.layers import Convolution2D, MaxPooling2D
|
||||
from keras.optimizers import SGD
|
||||
from keras.utils import np_utils
|
||||
|
||||
@@ -66,7 +66,9 @@ model.add(Activation('softmax'))
|
||||
|
||||
# let's train the model using SGD + momentum (how original).
|
||||
sgd = SGD(lr=0.01, decay=1e-6, momentum=0.9, nesterov=True)
|
||||
model.compile(loss='categorical_crossentropy', optimizer=sgd)
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer=sgd,
|
||||
metrics=['accuracy'])
|
||||
|
||||
X_train = X_train.astype('float32')
|
||||
X_test = X_test.astype('float32')
|
||||
@@ -75,9 +77,11 @@ X_test /= 255
|
||||
|
||||
if not data_augmentation:
|
||||
print('Not using data augmentation.')
|
||||
model.fit(X_train, Y_train, batch_size=batch_size,
|
||||
nb_epoch=nb_epoch, show_accuracy=True,
|
||||
validation_data=(X_test, Y_test), shuffle=True)
|
||||
model.fit(X_train, Y_train,
|
||||
batch_size=batch_size,
|
||||
nb_epoch=nb_epoch,
|
||||
validation_data=(X_test, Y_test),
|
||||
shuffle=True)
|
||||
else:
|
||||
print('Using real-time data augmentation.')
|
||||
|
||||
@@ -99,8 +103,8 @@ else:
|
||||
datagen.fit(X_train)
|
||||
|
||||
# fit the model on the batches generated by datagen.flow()
|
||||
model.fit_generator(datagen.flow(X_train, Y_train, batch_size=batch_size),
|
||||
model.fit_generator(datagen.flow(X_train, Y_train,
|
||||
batch_size=batch_size),
|
||||
samples_per_epoch=X_train.shape[0],
|
||||
nb_epoch=nb_epoch, show_accuracy=True,
|
||||
validation_data=(X_test, Y_test),
|
||||
nb_worker=1)
|
||||
nb_epoch=nb_epoch,
|
||||
validation_data=(X_test, Y_test))
|
||||
|
||||
@@ -47,15 +47,13 @@ def deprocess_image(x):
|
||||
x = np.clip(x, 0, 255).astype('uint8')
|
||||
return x
|
||||
|
||||
# this will contain our generated image
|
||||
input_img = K.placeholder((1, 3, img_width, img_height))
|
||||
|
||||
# build the VGG16 network with our input_img as input
|
||||
first_layer = ZeroPadding2D((1, 1), input_shape=(3, img_width, img_height))
|
||||
first_layer.input = input_img
|
||||
|
||||
# build the VGG16 network
|
||||
model = Sequential()
|
||||
model.add(first_layer)
|
||||
model.add(ZeroPadding2D((1, 1), batch_input_shape=(1, 3, img_width, img_height)))
|
||||
first_layer = model.layers[-1]
|
||||
# this is a placeholder tensor that will contain our generated images
|
||||
input_img = first_layer.input
|
||||
|
||||
model.add(Convolution2D(64, 3, 3, activation='relu', name='conv1_1'))
|
||||
model.add(ZeroPadding2D((1, 1)))
|
||||
model.add(Convolution2D(64, 3, 3, activation='relu', name='conv1_2'))
|
||||
@@ -125,7 +123,7 @@ for filter_index in range(0, 200):
|
||||
|
||||
# we build a loss function that maximizes the activation
|
||||
# of the nth filter of the layer considered
|
||||
layer_output = layer_dict[layer_name].get_output()
|
||||
layer_output = layer_dict[layer_name].output
|
||||
loss = K.mean(layer_output[:, filter_index, :, :])
|
||||
|
||||
# we compute the gradient of the input picture wrt this loss
|
||||
|
||||
+14
-16
@@ -9,7 +9,7 @@ e.g.:
|
||||
python deep_dream.py img/mypic.jpg results/dream
|
||||
```
|
||||
|
||||
It is preferrable to run this script on GPU, for speed.
|
||||
It is preferable to run this script on GPU, for speed.
|
||||
If running on CPU, prefer the TensorFlow backend (much faster).
|
||||
|
||||
Example results: http://i.imgur.com/FX6ROg9.jpg
|
||||
@@ -24,7 +24,7 @@ import h5py
|
||||
import os
|
||||
|
||||
from keras.models import Sequential
|
||||
from keras.layers.convolutional import Convolution2D, ZeroPadding2D, MaxPooling2D
|
||||
from keras.layers import Convolution2D, ZeroPadding2D, MaxPooling2D
|
||||
from keras import backend as K
|
||||
|
||||
parser = argparse.ArgumentParser(description='Deep Dreams with Keras.')
|
||||
@@ -74,15 +74,13 @@ def deprocess_image(x):
|
||||
x = np.clip(x, 0, 255).astype('uint8')
|
||||
return x
|
||||
|
||||
# this will contain our generated image
|
||||
dream = K.placeholder((1, 3, img_width, img_height))
|
||||
|
||||
# build the VGG16 network with our dream as input
|
||||
first_layer = ZeroPadding2D((1, 1), input_shape=(3, img_width, img_height))
|
||||
first_layer.input = dream
|
||||
|
||||
# build the VGG16 network
|
||||
model = Sequential()
|
||||
model.add(first_layer)
|
||||
model.add(ZeroPadding2D((1, 1), batch_input_shape=(1, 3, img_width, img_height)))
|
||||
first_layer = model.layers[-1]
|
||||
# this is a placeholder tensor that will contain our generated images
|
||||
dream = first_layer.input
|
||||
|
||||
model.add(Convolution2D(64, 3, 3, activation='relu', name='conv1_1'))
|
||||
model.add(ZeroPadding2D((1, 1)))
|
||||
model.add(Convolution2D(64, 3, 3, activation='relu', name='conv1_2'))
|
||||
@@ -150,7 +148,7 @@ for layer_name in settings['features']:
|
||||
# add the L2 norm of the features of a layer to the loss
|
||||
assert layer_name in layer_dict.keys(), 'Layer ' + layer_name + ' not found in model.'
|
||||
coeff = settings['features'][layer_name]
|
||||
x = layer_dict[layer_name].get_output()
|
||||
x = layer_dict[layer_name].output
|
||||
shape = layer_dict[layer_name].output_shape
|
||||
# we avoid border artifacts by only involving non-border pixels in the loss
|
||||
loss -= coeff * K.sum(K.square(x[:, :, 2: shape[2]-2, 2: shape[3]-2])) / np.prod(shape[1:])
|
||||
@@ -191,7 +189,7 @@ def eval_loss_and_grads(x):
|
||||
class Evaluator(object):
|
||||
def __init__(self):
|
||||
self.loss_value = None
|
||||
self.grads_values = None
|
||||
self.grad_values = None
|
||||
|
||||
def loss(self, x):
|
||||
assert self.loss_value is None
|
||||
@@ -216,9 +214,9 @@ for i in range(5):
|
||||
print('Start of iteration', i)
|
||||
start_time = time.time()
|
||||
|
||||
# add a random offset jitter to the initial image. This will be reverted at decoding time
|
||||
ox, oy = np.random.randint(-settings['jitter'], settings['jitter']+1, 2)
|
||||
x = np.roll(np.roll(x, ox, -1), oy, -2)
|
||||
# add a random jitter to the initial image. This will be reverted at decoding time
|
||||
random_jitter = (settings['jitter'] * 2) * (np.random.random((3, img_width, img_height)) - 0.5)
|
||||
x += random_jitter
|
||||
|
||||
# run L-BFGS for 7 steps
|
||||
x, min_val, info = fmin_l_bfgs_b(evaluator.loss, x.flatten(),
|
||||
@@ -226,7 +224,7 @@ for i in range(5):
|
||||
print('Current loss value:', min_val)
|
||||
# decode the dream and save it
|
||||
x = x.reshape((3, img_width, img_height))
|
||||
x = np.roll(np.roll(x, -ox, -1), -oy, -2) # unshift image
|
||||
x -= random_jitter
|
||||
img = deprocess_image(x)
|
||||
fname = result_prefix + '_at_iteration_%d.png' % i
|
||||
imsave(fname, img)
|
||||
|
||||
@@ -1,8 +1,5 @@
|
||||
'''Train a Bidirectional LSTM on the IMDB sentiment classification task.
|
||||
|
||||
GPU command:
|
||||
THEANO_FLAGS=mode=FAST_RUN,device=gpu,floatX=float32 python imdb_bidirectional_lstm.py
|
||||
|
||||
Output after 4 epochs on CPU: ~0.8146
|
||||
Time per epoch on CPU (Core i7): ~150s.
|
||||
'''
|
||||
@@ -12,11 +9,8 @@ import numpy as np
|
||||
np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.preprocessing import sequence
|
||||
from keras.utils.np_utils import accuracy
|
||||
from keras.models import Graph
|
||||
from keras.layers.core import Dense, Dropout
|
||||
from keras.layers.embeddings import Embedding
|
||||
from keras.layers.recurrent import LSTM
|
||||
from keras.models import Model
|
||||
from keras.layers import Dense, Dropout, Embedding, LSTM, Input, merge
|
||||
from keras.datasets import imdb
|
||||
|
||||
|
||||
@@ -25,8 +19,7 @@ maxlen = 100 # cut texts after this number of words (among top max_features mos
|
||||
batch_size = 32
|
||||
|
||||
print('Loading data...')
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(nb_words=max_features,
|
||||
test_split=0.2)
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(nb_words=max_features)
|
||||
print(len(X_train), 'train sequences')
|
||||
print(len(X_test), 'test sequences')
|
||||
|
||||
@@ -38,25 +31,30 @@ print('X_test shape:', X_test.shape)
|
||||
y_train = np.array(y_train)
|
||||
y_test = np.array(y_test)
|
||||
|
||||
print('Build model...')
|
||||
model = Graph()
|
||||
model.add_input(name='input', input_shape=(maxlen,), dtype=int)
|
||||
model.add_node(Embedding(max_features, 128, input_length=maxlen),
|
||||
name='embedding', input='input')
|
||||
model.add_node(LSTM(64), name='forward', input='embedding')
|
||||
model.add_node(LSTM(64, go_backwards=True), name='backward', input='embedding')
|
||||
model.add_node(Dropout(0.5), name='dropout', inputs=['forward', 'backward'])
|
||||
model.add_node(Dense(1, activation='sigmoid'), name='sigmoid', input='dropout')
|
||||
model.add_output(name='output', input='sigmoid')
|
||||
|
||||
# this is the placeholder tensor for the input sequences
|
||||
sequence = Input(shape=(maxlen,), dtype='int32')
|
||||
# this embedding layer will transform the sequences of integers
|
||||
# into vectors of size 128
|
||||
embedded = Embedding(max_features, 128, input_length=maxlen)(sequence)
|
||||
|
||||
# apply forwards LSTM
|
||||
forwards = LSTM(64)(embedded)
|
||||
# apply backwards LSTM
|
||||
backwards = LSTM(64, go_backwards=True)(embedded)
|
||||
|
||||
# concatenate the outputs of the 2 LSTMs
|
||||
merged = merge([forwards, backwards], mode='concat', concat_axis=-1)
|
||||
after_dp = Dropout(0.5)(merged)
|
||||
output = Dense(1, activation='sigmoid')(after_dp)
|
||||
|
||||
model = Model(input=sequence, output=output)
|
||||
|
||||
# try using different optimizers and different optimizer configs
|
||||
model.compile('adam', {'output': 'binary_crossentropy'})
|
||||
model.compile('adam', 'binary_crossentropy', metrics=['accuracy'])
|
||||
|
||||
print('Train...')
|
||||
model.fit({'input': X_train, 'output': y_train},
|
||||
model.fit(X_train, y_train,
|
||||
batch_size=batch_size,
|
||||
nb_epoch=4, show_accuracy=True)
|
||||
acc = accuracy(y_test,
|
||||
np.round(np.array(model.predict({'input': X_test},
|
||||
batch_size=batch_size)['output'])))
|
||||
print('Test accuracy:', acc)
|
||||
nb_epoch=4,
|
||||
validation_data=[X_test, y_test])
|
||||
|
||||
+22
-17
@@ -1,8 +1,9 @@
|
||||
'''This example demonstrates the use of Convolution1D for text classification.
|
||||
|
||||
Run on GPU: THEANO_FLAGS=mode=FAST_RUN,device=gpu,floatX=float32 python imdb_cnn.py
|
||||
Gets to 0.89 test accuracy after 2 epochs.
|
||||
90s/epoch on Intel i5 2.4Ghz CPU.
|
||||
10s/epoch on Tesla K40 GPU.
|
||||
|
||||
Get to 0.835 test accuracy after 2 epochs. 100s/epoch on K520 GPU.
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
@@ -11,25 +12,25 @@ np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.preprocessing import sequence
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Activation, Flatten
|
||||
from keras.layers.embeddings import Embedding
|
||||
from keras.layers.convolutional import Convolution1D, MaxPooling1D
|
||||
from keras.layers import Dense, Dropout, Activation, Flatten
|
||||
from keras.layers import Embedding
|
||||
from keras.layers import Convolution1D, MaxPooling1D
|
||||
from keras.datasets import imdb
|
||||
from keras import backend as K
|
||||
|
||||
|
||||
# set parameters:
|
||||
max_features = 5000
|
||||
maxlen = 100
|
||||
maxlen = 400
|
||||
batch_size = 32
|
||||
embedding_dims = 100
|
||||
embedding_dims = 50
|
||||
nb_filter = 250
|
||||
filter_length = 3
|
||||
hidden_dims = 250
|
||||
nb_epoch = 2
|
||||
|
||||
print('Loading data...')
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(nb_words=max_features,
|
||||
test_split=0.2)
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(nb_words=max_features)
|
||||
print(len(X_train), 'train sequences')
|
||||
print(len(X_test), 'test sequences')
|
||||
|
||||
@@ -44,8 +45,10 @@ model = Sequential()
|
||||
|
||||
# we start off with an efficient embedding layer which maps
|
||||
# our vocab indices into embedding_dims dimensions
|
||||
model.add(Embedding(max_features, embedding_dims, input_length=maxlen))
|
||||
model.add(Dropout(0.25))
|
||||
model.add(Embedding(max_features,
|
||||
embedding_dims,
|
||||
input_length=maxlen,
|
||||
dropout=0.2))
|
||||
|
||||
# we add a Convolution1D, which will learn nb_filter
|
||||
# word group filters of size filter_length:
|
||||
@@ -54,8 +57,8 @@ model.add(Convolution1D(nb_filter=nb_filter,
|
||||
border_mode='valid',
|
||||
activation='relu',
|
||||
subsample_length=1))
|
||||
# we use standard max pooling (halving the output of the previous layer):
|
||||
model.add(MaxPooling1D(pool_length=2))
|
||||
# we use max pooling:
|
||||
model.add(MaxPooling1D(pool_length=model.output_shape[1]))
|
||||
|
||||
# We flatten the output of the conv layer,
|
||||
# so that we can add a vanilla dense layer:
|
||||
@@ -63,7 +66,7 @@ model.add(Flatten())
|
||||
|
||||
# We add a vanilla hidden layer:
|
||||
model.add(Dense(hidden_dims))
|
||||
model.add(Dropout(0.25))
|
||||
model.add(Dropout(0.2))
|
||||
model.add(Activation('relu'))
|
||||
|
||||
# We project onto a single unit output layer, and squash it with a sigmoid:
|
||||
@@ -71,7 +74,9 @@ model.add(Dense(1))
|
||||
model.add(Activation('sigmoid'))
|
||||
|
||||
model.compile(loss='binary_crossentropy',
|
||||
optimizer='rmsprop')
|
||||
model.fit(X_train, y_train, batch_size=batch_size,
|
||||
nb_epoch=nb_epoch, show_accuracy=True,
|
||||
optimizer='adam',
|
||||
metrics=['accuracy'])
|
||||
model.fit(X_train, y_train,
|
||||
batch_size=batch_size,
|
||||
nb_epoch=nb_epoch,
|
||||
validation_data=(X_test, y_test))
|
||||
|
||||
+11
-16
@@ -1,22 +1,18 @@
|
||||
'''Train a recurrent convolutional network on the IMDB sentiment
|
||||
classification task.
|
||||
|
||||
GPU command:
|
||||
THEANO_FLAGS=mode=FAST_RUN,device=gpu,floatX=float32 python imdb_cnn_lstm.py
|
||||
|
||||
Get to 0.8498 test accuracy after 2 epochs. 41s/epoch on K520 GPU.
|
||||
Gets to 0.8498 test accuracy after 2 epochs. 41s/epoch on K520 GPU.
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
import numpy as np
|
||||
np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.preprocessing import sequence
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Activation
|
||||
from keras.layers.embeddings import Embedding
|
||||
from keras.layers.recurrent import LSTM, GRU, SimpleRNN
|
||||
from keras.layers.convolutional import Convolution1D, MaxPooling1D
|
||||
from keras.layers import Dense, Dropout, Activation
|
||||
from keras.layers import Embedding
|
||||
from keras.layers import LSTM, GRU, SimpleRNN
|
||||
from keras.layers import Convolution1D, MaxPooling1D
|
||||
from keras.datasets import imdb
|
||||
|
||||
|
||||
@@ -26,9 +22,9 @@ maxlen = 100
|
||||
embedding_size = 128
|
||||
|
||||
# Convolution
|
||||
filter_length = 3
|
||||
filter_length = 5
|
||||
nb_filter = 64
|
||||
pool_length = 2
|
||||
pool_length = 4
|
||||
|
||||
# LSTM
|
||||
lstm_output_size = 70
|
||||
@@ -44,7 +40,7 @@ Only 2 epochs are needed as the dataset is very small.
|
||||
'''
|
||||
|
||||
print('Loading data...')
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(nb_words=max_features, test_split=0.2)
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(nb_words=max_features)
|
||||
print(len(X_train), 'train sequences')
|
||||
print(len(X_test), 'test sequences')
|
||||
|
||||
@@ -71,12 +67,11 @@ model.add(Activation('sigmoid'))
|
||||
|
||||
model.compile(loss='binary_crossentropy',
|
||||
optimizer='adam',
|
||||
class_mode='binary')
|
||||
metrics=['accuracy'])
|
||||
|
||||
print('Train...')
|
||||
model.fit(X_train, y_train, batch_size=batch_size, nb_epoch=nb_epoch,
|
||||
validation_data=(X_test, y_test), show_accuracy=True)
|
||||
score, acc = model.evaluate(X_test, y_test, batch_size=batch_size,
|
||||
show_accuracy=True)
|
||||
validation_data=(X_test, y_test))
|
||||
score, acc = model.evaluate(X_test, y_test, batch_size=batch_size)
|
||||
print('Test score:', score)
|
||||
print('Test accuracy:', acc)
|
||||
|
||||
+12
-19
@@ -1,7 +1,7 @@
|
||||
'''Train a LSTM on the IMDB sentiment classification task.
|
||||
'''Trains a LSTM on the IMDB sentiment classification task.
|
||||
|
||||
The dataset is actually too small for LSTM to be of any advantage
|
||||
compared to simpler, much faster methods such as TF-IDF+LogReg.
|
||||
compared to simpler, much faster methods such as TF-IDF + LogReg.
|
||||
|
||||
Notes:
|
||||
|
||||
@@ -11,11 +11,7 @@ Some configurations won't converge.
|
||||
|
||||
- LSTM loss decrease patterns during training can be quite different
|
||||
from what you see with CNNs/MLPs/etc.
|
||||
|
||||
GPU command:
|
||||
THEANO_FLAGS=mode=FAST_RUN,device=gpu,floatX=float32 python imdb_lstm.py
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
import numpy as np
|
||||
np.random.seed(1337) # for reproducibility
|
||||
@@ -23,18 +19,16 @@ np.random.seed(1337) # for reproducibility
|
||||
from keras.preprocessing import sequence
|
||||
from keras.utils import np_utils
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Activation
|
||||
from keras.layers.embeddings import Embedding
|
||||
from keras.layers.recurrent import LSTM
|
||||
from keras.layers import Dense, Dropout, Activation, Embedding
|
||||
from keras.layers import LSTM, SimpleRNN, GRU
|
||||
from keras.datasets import imdb
|
||||
|
||||
max_features = 20000
|
||||
maxlen = 100 # cut texts after this number of words (among top max_features most common words)
|
||||
maxlen = 80 # cut texts after this number of words (among top max_features most common words)
|
||||
batch_size = 32
|
||||
|
||||
print('Loading data...')
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(nb_words=max_features,
|
||||
test_split=0.2)
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(nb_words=max_features)
|
||||
print(len(X_train), 'train sequences')
|
||||
print(len(X_test), 'test sequences')
|
||||
|
||||
@@ -46,21 +40,20 @@ print('X_test shape:', X_test.shape)
|
||||
|
||||
print('Build model...')
|
||||
model = Sequential()
|
||||
model.add(Embedding(max_features, 128, input_length=maxlen, dropout=0.5))
|
||||
model.add(LSTM(128, dropout_W=0.5, dropout_U=0.1)) # try using a GRU instead, for fun
|
||||
model.add(Dropout(0.5))
|
||||
model.add(Embedding(max_features, 128, input_length=maxlen, dropout=0.2))
|
||||
model.add(LSTM(128, dropout_W=0.2, dropout_U=0.2)) # try using a GRU instead, for fun
|
||||
model.add(Dense(1))
|
||||
model.add(Activation('sigmoid'))
|
||||
|
||||
# try using different optimizers and different optimizer configs
|
||||
model.compile(loss='binary_crossentropy',
|
||||
optimizer='adam')
|
||||
optimizer='adam',
|
||||
metrics=['accuracy'])
|
||||
|
||||
print('Train...')
|
||||
model.fit(X_train, y_train, batch_size=batch_size, nb_epoch=15,
|
||||
validation_data=(X_test, y_test), show_accuracy=True)
|
||||
validation_data=(X_test, y_test))
|
||||
score, acc = model.evaluate(X_test, y_test,
|
||||
batch_size=batch_size,
|
||||
show_accuracy=True)
|
||||
batch_size=batch_size)
|
||||
print('Test score:', score)
|
||||
print('Test accuracy:', acc)
|
||||
|
||||
@@ -0,0 +1,290 @@
|
||||
'''This script demonstrates how to build the Inception v3 architecture
|
||||
using the Keras functional API.
|
||||
We are not actually training it here, for lack of appropriate data.
|
||||
|
||||
For more information about this architecture, see:
|
||||
|
||||
"Rethinking the Inception Architecture for Computer Vision"
|
||||
Christian Szegedy, Vincent Vanhoucke, Sergey Ioffe, Jonathon Shlens, Zbigniew Wojna
|
||||
http://arxiv.org/abs/1512.00567
|
||||
'''
|
||||
from keras.layers import Convolution2D, MaxPooling2D, AveragePooling2D
|
||||
from keras.layers import BatchNormalization, Flatten, Dense, Dropout
|
||||
from keras.layers import Input, merge
|
||||
from keras.models import Model
|
||||
from keras import regularizers
|
||||
|
||||
|
||||
# global constants
|
||||
NB_CLASS = 1000 # number of classes
|
||||
DIM_ORDERING = 'th' # 'th' (channels, width, height) or 'tf' (width, height, channels)
|
||||
WEIGHT_DECAY = 0. # L2 regularization factor
|
||||
USE_BN = False # whether to use batch normalization
|
||||
|
||||
|
||||
def conv2D_bn(x, nb_filter, nb_row, nb_col,
|
||||
border_mode='same', subsample=(1, 1),
|
||||
activation='relu', batch_norm=USE_BN,
|
||||
weight_decay=WEIGHT_DECAY, dim_ordering=DIM_ORDERING):
|
||||
'''Utility function to apply to a tensor a module conv + BN
|
||||
with optional weight decay (L2 weight regularization).
|
||||
'''
|
||||
if weight_decay:
|
||||
W_regularizer = regularizers.l2(weight_decay)
|
||||
b_regularizer = regularizers.l2(weight_decay)
|
||||
else:
|
||||
W_regularizer = None
|
||||
b_regularizer = None
|
||||
x = Convolution2D(nb_filter, nb_row, nb_col,
|
||||
subsample=subsample,
|
||||
activation=activation,
|
||||
border_mode=border_mode,
|
||||
W_regularizer=W_regularizer,
|
||||
b_regularizer=b_regularizer,
|
||||
dim_ordering=dim_ordering)(x)
|
||||
if batch_norm:
|
||||
x = BatchNormalization()(x)
|
||||
return x
|
||||
|
||||
# Define image input layer
|
||||
|
||||
if DIM_ORDERING == 'th':
|
||||
img_input = Input(shape=(3, 299, 299))
|
||||
CONCAT_AXIS = 1
|
||||
elif DIM_ORDERING == 'tf':
|
||||
img_input = Input(shape=(299, 299, 3))
|
||||
CONCAT_AXIS = 3
|
||||
else:
|
||||
raise Exception('Invalid dim ordering: ' + str(DIM_ORDERING))
|
||||
|
||||
# Entry module
|
||||
|
||||
x = conv2D_bn(img_input, 32, 3, 3, subsample=(2, 2), border_mode='valid')
|
||||
x = conv2D_bn(x, 32, 3, 3, border_mode='valid')
|
||||
x = conv2D_bn(x, 64, 3, 3)
|
||||
x = MaxPooling2D((3, 3), strides=(2, 2), dim_ordering=DIM_ORDERING)(x)
|
||||
|
||||
x = conv2D_bn(x, 80, 1, 1, border_mode='valid')
|
||||
x = conv2D_bn(x, 192, 3, 3, border_mode='valid')
|
||||
x = MaxPooling2D((3, 3), strides=(2, 2), dim_ordering=DIM_ORDERING)(x)
|
||||
|
||||
# mixed: 35 x 35 x 256
|
||||
|
||||
branch1x1 = conv2D_bn(x, 64, 1, 1)
|
||||
|
||||
branch5x5 = conv2D_bn(x, 48, 1, 1)
|
||||
branch5x5 = conv2D_bn(branch5x5, 64, 5, 5)
|
||||
|
||||
branch3x3dbl = conv2D_bn(x, 64, 1, 1)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 96, 3, 3)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 96, 3, 3)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 32, 1, 1)
|
||||
x = merge([branch1x1, branch5x5, branch3x3dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed_1: 35 x 35 x 288
|
||||
|
||||
branch1x1 = conv2D_bn(x, 64, 1, 1)
|
||||
|
||||
branch5x5 = conv2D_bn(x, 48, 1, 1)
|
||||
branch5x5 = conv2D_bn(branch5x5, 64, 5, 5)
|
||||
|
||||
branch3x3dbl = conv2D_bn(x, 64, 1, 1)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 96, 3, 3)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 96, 3, 3)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 64, 1, 1)
|
||||
x = merge([branch1x1, branch5x5, branch3x3dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed2: 35 x 35 x 288
|
||||
|
||||
branch1x1 = conv2D_bn(x, 64, 1, 1)
|
||||
|
||||
branch5x5 = conv2D_bn(x, 48, 1, 1)
|
||||
branch5x5 = conv2D_bn(branch5x5, 64, 5, 5)
|
||||
|
||||
branch3x3dbl = conv2D_bn(x, 64, 1, 1)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 96, 3, 3)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 96, 3, 3)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 64, 1, 1)
|
||||
x = merge([branch1x1, branch5x5, branch3x3dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed3: 17 x 17 x 768
|
||||
|
||||
branch3x3 = conv2D_bn(x, 384, 3, 3, subsample=(2, 2), border_mode='valid')
|
||||
|
||||
branch3x3dbl = conv2D_bn(x, 64, 1, 1)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 96, 3, 3)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 96, 3, 3, subsample=(2, 2), border_mode='valid')
|
||||
|
||||
branch_pool = MaxPooling2D((3, 3), strides=(2, 2), dim_ordering=DIM_ORDERING)(x)
|
||||
x = merge([branch3x3, branch3x3dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed4: 17 x 17 x 768
|
||||
|
||||
branch1x1 = conv2D_bn(x, 192, 1, 1)
|
||||
|
||||
branch7x7 = conv2D_bn(x, 128, 1, 1)
|
||||
branch7x7 = conv2D_bn(branch7x7, 128, 1, 7)
|
||||
branch7x7 = conv2D_bn(branch7x7, 192, 7, 1)
|
||||
|
||||
branch7x7dbl = conv2D_bn(x, 128, 1, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 128, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 128, 1, 7)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 128, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 192, 1, 7)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 192, 1, 1)
|
||||
x = merge([branch1x1, branch7x7, branch7x7dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed5: 17 x 17 x 768
|
||||
|
||||
branch1x1 = conv2D_bn(x, 192, 1, 1)
|
||||
|
||||
branch7x7 = conv2D_bn(x, 160, 1, 1)
|
||||
branch7x7 = conv2D_bn(branch7x7, 160, 1, 7)
|
||||
branch7x7 = conv2D_bn(branch7x7, 192, 7, 1)
|
||||
|
||||
branch7x7dbl = conv2D_bn(x, 160, 1, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 160, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 160, 1, 7)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 160, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 192, 1, 7)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 192, 1, 1)
|
||||
x = merge([branch1x1, branch7x7, branch7x7dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed5: 17 x 17 x 768
|
||||
|
||||
branch1x1 = conv2D_bn(x, 192, 1, 1)
|
||||
|
||||
branch7x7 = conv2D_bn(x, 160, 1, 1)
|
||||
branch7x7 = conv2D_bn(branch7x7, 160, 1, 7)
|
||||
branch7x7 = conv2D_bn(branch7x7, 192, 7, 1)
|
||||
|
||||
branch7x7dbl = conv2D_bn(x, 160, 1, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 160, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 160, 1, 7)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 160, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 192, 1, 7)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 192, 1, 1)
|
||||
x = merge([branch1x1, branch7x7, branch7x7dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed6: 17 x 17 x 768
|
||||
|
||||
branch1x1 = conv2D_bn(x, 192, 1, 1)
|
||||
|
||||
branch7x7 = conv2D_bn(x, 160, 1, 1)
|
||||
branch7x7 = conv2D_bn(branch7x7, 160, 1, 7)
|
||||
branch7x7 = conv2D_bn(branch7x7, 192, 7, 1)
|
||||
|
||||
branch7x7dbl = conv2D_bn(x, 160, 1, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 160, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 192, 1, 7)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 160, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 192, 1, 7)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 192, 1, 1)
|
||||
x = merge([branch1x1, branch7x7, branch7x7dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed7: 17 x 17 x 768
|
||||
|
||||
branch1x1 = conv2D_bn(x, 192, 1, 1)
|
||||
|
||||
branch7x7 = conv2D_bn(x, 192, 1, 1)
|
||||
branch7x7 = conv2D_bn(branch7x7, 192, 1, 7)
|
||||
branch7x7 = conv2D_bn(branch7x7, 192, 7, 1)
|
||||
|
||||
branch7x7dbl = conv2D_bn(x, 160, 1, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 192, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 192, 1, 7)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 192, 7, 1)
|
||||
branch7x7dbl = conv2D_bn(branch7x7dbl, 192, 1, 7)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 192, 1, 1)
|
||||
x = merge([branch1x1, branch7x7, branch7x7dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# Auxiliary head
|
||||
|
||||
aux_logits = AveragePooling2D((5, 5), strides=(3, 3), dim_ordering=DIM_ORDERING)(x)
|
||||
aux_logits = conv2D_bn(aux_logits, 128, 1, 1)
|
||||
aux_logits = conv2D_bn(aux_logits, 728, 5, 5, border_mode='valid')
|
||||
aux_logits = Flatten()(aux_logits)
|
||||
aux_preds = Dense(NB_CLASS, activation='softmax')(aux_logits)
|
||||
|
||||
# mixed8: 8 x 8 x 1280
|
||||
|
||||
branch3x3 = conv2D_bn(x, 192, 1, 1)
|
||||
branch3x3 = conv2D_bn(branch3x3, 320, 3, 3, subsample=(2, 2), border_mode='valid')
|
||||
|
||||
branch7x7x3 = conv2D_bn(x, 192, 1, 1)
|
||||
branch7x7x3 = conv2D_bn(branch7x7x3, 192, 1, 7)
|
||||
branch7x7x3 = conv2D_bn(branch7x7x3, 192, 7, 1)
|
||||
branch7x7x3 = conv2D_bn(branch7x7x3, 192, 3, 3, subsample=(2, 2), border_mode='valid')
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(2, 2), dim_ordering=DIM_ORDERING)(x)
|
||||
x = merge([branch3x3, branch7x7x3, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed9: 8 x 8 x 2048
|
||||
|
||||
branch1x1 = conv2D_bn(x, 320, 1, 1)
|
||||
|
||||
branch3x3 = conv2D_bn(x, 384, 1, 1)
|
||||
branch3x3_1 = conv2D_bn(branch3x3, 384, 1, 3)
|
||||
branch3x3_2 = conv2D_bn(branch3x3, 384, 3, 1)
|
||||
branch3x3 = merge([branch3x3_1, branch3x3_2], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
branch3x3dbl = conv2D_bn(x, 448, 1, 1)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 384, 3, 3)
|
||||
branch3x3dbl_1 = conv2D_bn(branch3x3dbl, 384, 1, 3)
|
||||
branch3x3dbl_2 = conv2D_bn(branch3x3dbl, 384, 3, 1)
|
||||
branch3x3dbl = merge([branch3x3dbl_1, branch3x3dbl_2], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 192, 1, 1)
|
||||
x = merge([branch1x1, branch3x3, branch3x3dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# mixed10: 8 x 8 x 2048
|
||||
|
||||
branch1x1 = conv2D_bn(x, 320, 1, 1)
|
||||
|
||||
branch3x3 = conv2D_bn(x, 384, 1, 1)
|
||||
branch3x3_1 = conv2D_bn(branch3x3, 384, 1, 3)
|
||||
branch3x3_2 = conv2D_bn(branch3x3, 384, 3, 1)
|
||||
branch3x3 = merge([branch3x3_1, branch3x3_2], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
branch3x3dbl = conv2D_bn(x, 448, 1, 1)
|
||||
branch3x3dbl = conv2D_bn(branch3x3dbl, 384, 3, 3)
|
||||
branch3x3dbl_1 = conv2D_bn(branch3x3dbl, 384, 1, 3)
|
||||
branch3x3dbl_2 = conv2D_bn(branch3x3dbl, 384, 3, 1)
|
||||
branch3x3dbl = merge([branch3x3dbl_1, branch3x3dbl_2], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), border_mode='same', dim_ordering=DIM_ORDERING)(x)
|
||||
branch_pool = conv2D_bn(branch_pool, 192, 1, 1)
|
||||
x = merge([branch1x1, branch3x3, branch3x3dbl, branch_pool], mode='concat', concat_axis=CONCAT_AXIS)
|
||||
|
||||
# Final pooling and prediction
|
||||
|
||||
x = AveragePooling2D((8, 8), strides=(1, 1), dim_ordering=DIM_ORDERING)(x)
|
||||
x = Dropout(0.5)(x)
|
||||
x = Flatten()(x)
|
||||
preds = Dense(NB_CLASS, activation='softmax')(x)
|
||||
|
||||
# Define model
|
||||
|
||||
model = Model(input=img_input, output=[preds, aux_preds])
|
||||
model.compile('rmsprop', 'categorical_crossentropy')
|
||||
|
||||
# train via e.g. `model.fit(x_train, [y_train] * 2, batch_size=32, nb_epoch=100)`
|
||||
# Note that for a large dataset it would be preferable
|
||||
# to train using `fit_generator` (see Keras docs).
|
||||
@@ -1,121 +0,0 @@
|
||||
'''This demonstrates how to reach a score of 0.4890 (local validation)
|
||||
on the Kaggle Otto challenge, with a deep net using Keras.
|
||||
|
||||
Requires Scikit-Learn and Pandas.
|
||||
|
||||
Recommended to run on GPU:
|
||||
Command: THEANO_FLAGS=mode=FAST_RUN,device=gpu,floatX=float32 python kaggle_otto_nn.py
|
||||
On EC2 g2.2xlarge instance: 19s/epoch. 6-7 minutes total training time.
|
||||
|
||||
Best validation score at epoch 21: 0.4881
|
||||
|
||||
Try it at home:
|
||||
- with/without BatchNormalization (BatchNormalization helps!)
|
||||
- with ReLU or with PReLU (PReLU helps!)
|
||||
- with smaller layers, largers layers
|
||||
- with more layers, less layers
|
||||
- with different optimizers (SGD+momentum+decay is probably better than Adam!)
|
||||
|
||||
Get the data from Kaggle:
|
||||
https://www.kaggle.com/c/otto-group-product-classification-challenge/data
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
import numpy as np
|
||||
import pandas as pd
|
||||
np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Activation
|
||||
from keras.layers.normalization import BatchNormalization
|
||||
from keras.layers.advanced_activations import PReLU
|
||||
from keras.utils import np_utils, generic_utils
|
||||
|
||||
from sklearn.preprocessing import LabelEncoder
|
||||
from sklearn.preprocessing import StandardScaler
|
||||
|
||||
|
||||
def load_data(path, train=True):
|
||||
df = pd.read_csv(path)
|
||||
X = df.values.copy()
|
||||
if train:
|
||||
np.random.shuffle(X) # https://youtu.be/uyUXoap67N8
|
||||
X, labels = X[:, 1:-1].astype(np.float32), X[:, -1]
|
||||
return X, labels
|
||||
else:
|
||||
X, ids = X[:, 1:].astype(np.float32), X[:, 0].astype(str)
|
||||
return X, ids
|
||||
|
||||
|
||||
def preprocess_data(X, scaler=None):
|
||||
if not scaler:
|
||||
scaler = StandardScaler()
|
||||
scaler.fit(X)
|
||||
X = scaler.transform(X)
|
||||
return X, scaler
|
||||
|
||||
|
||||
def preprocess_labels(labels, encoder=None, categorical=True):
|
||||
if not encoder:
|
||||
encoder = LabelEncoder()
|
||||
encoder.fit(labels)
|
||||
y = encoder.transform(labels).astype(np.int32)
|
||||
if categorical:
|
||||
y = np_utils.to_categorical(y)
|
||||
return y, encoder
|
||||
|
||||
|
||||
def make_submission(y_prob, ids, encoder, fname):
|
||||
with open(fname, 'w') as f:
|
||||
f.write('id,')
|
||||
f.write(','.join([str(i) for i in encoder.classes_]))
|
||||
f.write('\n')
|
||||
for i, probs in zip(ids, y_prob):
|
||||
probas = ','.join([i] + [str(p) for p in probs.tolist()])
|
||||
f.write(probas)
|
||||
f.write('\n')
|
||||
print('Wrote submission to file {}.'.format(fname))
|
||||
|
||||
print('Loading data...')
|
||||
X, labels = load_data('train.csv', train=True)
|
||||
X, scaler = preprocess_data(X)
|
||||
y, encoder = preprocess_labels(labels)
|
||||
|
||||
X_test, ids = load_data('test.csv', train=False)
|
||||
X_test, _ = preprocess_data(X_test, scaler)
|
||||
|
||||
nb_classes = y.shape[1]
|
||||
print(nb_classes, 'classes')
|
||||
|
||||
dims = X.shape[1]
|
||||
print(dims, 'dims')
|
||||
|
||||
print('Building model...')
|
||||
|
||||
model = Sequential()
|
||||
model.add(Dense(512, input_shape=(dims,)))
|
||||
model.add(PReLU())
|
||||
model.add(BatchNormalization())
|
||||
model.add(Dropout(0.5))
|
||||
|
||||
model.add(Dense(512))
|
||||
model.add(PReLU())
|
||||
model.add(BatchNormalization())
|
||||
model.add(Dropout(0.5))
|
||||
|
||||
model.add(Dense(512))
|
||||
model.add(PReLU())
|
||||
model.add(BatchNormalization())
|
||||
model.add(Dropout(0.5))
|
||||
|
||||
model.add(Dense(nb_classes))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
model.compile(loss='categorical_crossentropy', optimizer='adam')
|
||||
|
||||
print('Training model...')
|
||||
model.fit(X, y, nb_epoch=20, batch_size=128, validation_split=0.15)
|
||||
|
||||
print('Generating submission...')
|
||||
proba = model.predict_proba(X_test)
|
||||
make_submission(proba, ids, encoder, fname='keras-otto.csv')
|
||||
@@ -0,0 +1,83 @@
|
||||
'''Compare LSTM implementations on the IMDB sentiment classification task.
|
||||
|
||||
consume_less='cpu' preprocesses input to the LSTM which typically results in
|
||||
faster computations at the expense of increased peak memory usage as the
|
||||
preprocessed input must be kept in memory.
|
||||
|
||||
consume_less='mem' does away with the preprocessing, meaning that it might take
|
||||
a little longer, but should require less peak memory.
|
||||
|
||||
consume_less='gpu' concatenates the input, output and forget gate's weights
|
||||
into one, large matrix, resulting in faster computation time as the GPU can
|
||||
utilize more cores, at the expense of reduced regularization because the same
|
||||
dropout is shared across the gates.
|
||||
|
||||
Note that the relative performance of the different `consume_less` modes
|
||||
can vary depending on your device, your model and the size of your data.
|
||||
'''
|
||||
|
||||
import time
|
||||
import numpy as np
|
||||
import matplotlib.pyplot as plt
|
||||
|
||||
from keras.preprocessing import sequence
|
||||
from keras.models import Sequential
|
||||
from keras.layers import Embedding, Dense, LSTM
|
||||
from keras.datasets import imdb
|
||||
|
||||
max_features = 20000
|
||||
max_length = 80
|
||||
embedding_dim = 256
|
||||
batch_size = 128
|
||||
epochs = 10
|
||||
modes = ['cpu', 'mem', 'gpu']
|
||||
|
||||
print('Loading data...')
|
||||
(X_train, y_train), (X_test, y_test) = imdb.load_data(nb_words=max_features)
|
||||
X_train = sequence.pad_sequences(X_train, max_length)
|
||||
X_test = sequence.pad_sequences(X_test, max_length)
|
||||
|
||||
# Compile and train different models while meauring performance.
|
||||
results = []
|
||||
for mode in modes:
|
||||
print('Testing mode: consume_less="{}"'.format(mode))
|
||||
|
||||
model = Sequential()
|
||||
model.add(Embedding(max_features, embedding_dim, input_length=max_length, dropout=0.2))
|
||||
model.add(LSTM(embedding_dim, dropout_W=0.2, dropout_U=0.2, consume_less=mode))
|
||||
model.add(Dense(1, activation='sigmoid'))
|
||||
model.compile(loss='binary_crossentropy',
|
||||
optimizer='adam',
|
||||
metrics=['accuracy'])
|
||||
|
||||
start_time = time.time()
|
||||
history = model.fit(X_train, y_train,
|
||||
batch_size=batch_size,
|
||||
nb_epoch=epochs,
|
||||
validation_data=(X_test, y_test))
|
||||
average_time_per_epoch = (time.time() - start_time) / epochs
|
||||
|
||||
results.append((history, average_time_per_epoch))
|
||||
|
||||
# Compare models' accuracy, loss and elapsed time per epoch.
|
||||
plt.style.use('ggplot')
|
||||
ax1 = plt.subplot2grid((2, 2), (0, 0))
|
||||
ax1.set_title('Accuracy')
|
||||
ax1.set_ylabel('Validation Accuracy')
|
||||
ax1.set_xlabel('Epochs')
|
||||
ax2 = plt.subplot2grid((2, 2), (1, 0))
|
||||
ax2.set_title('Loss')
|
||||
ax2.set_ylabel('Validation Loss')
|
||||
ax2.set_xlabel('Epochs')
|
||||
ax3 = plt.subplot2grid((2, 2), (0, 1), rowspan=2)
|
||||
ax3.set_title('Time')
|
||||
ax3.set_ylabel('Seconds')
|
||||
for mode, result in zip(modes, results):
|
||||
ax1.plot(result[0].epoch, result[0].history['val_acc'], label=mode)
|
||||
ax2.plot(result[0].epoch, result[0].history['val_loss'], label=mode)
|
||||
ax1.legend()
|
||||
ax2.legend()
|
||||
ax3.bar(np.arange(len(results)), [x[1] for x in results],
|
||||
tick_label=modes, align='center')
|
||||
plt.tight_layout()
|
||||
plt.show()
|
||||
@@ -12,30 +12,25 @@ has at least ~100k characters. ~1M is better.
|
||||
|
||||
from __future__ import print_function
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Activation, Dropout
|
||||
from keras.layers.recurrent import LSTM
|
||||
from keras.layers import Dense, Activation, Dropout
|
||||
from keras.layers import LSTM
|
||||
from keras.optimizers import RMSprop
|
||||
from keras.utils.data_utils import get_file
|
||||
import numpy as np
|
||||
import random
|
||||
import sys
|
||||
|
||||
path = get_file('nietzsche.txt', origin="https://s3.amazonaws.com/text-datasets/nietzsche.txt")
|
||||
|
||||
try:
|
||||
text = open(path).read().lower()
|
||||
except UnicodeDecodeError:
|
||||
import codecs
|
||||
text = codecs.open(path, encoding='utf-8').read().lower()
|
||||
|
||||
text = open(path).read().lower()
|
||||
print('corpus length:', len(text))
|
||||
|
||||
chars = set(text)
|
||||
chars = sorted(list(set(text)))
|
||||
print('total chars:', len(chars))
|
||||
char_indices = dict((c, i) for i, c in enumerate(chars))
|
||||
indices_char = dict((i, c) for i, c in enumerate(chars))
|
||||
|
||||
# cut the text in semi-redundant sequences of maxlen characters
|
||||
maxlen = 20
|
||||
maxlen = 40
|
||||
step = 3
|
||||
sentences = []
|
||||
next_chars = []
|
||||
@@ -56,21 +51,22 @@ for i, sentence in enumerate(sentences):
|
||||
# build the model: 2 stacked LSTM
|
||||
print('Build model...')
|
||||
model = Sequential()
|
||||
model.add(LSTM(512, return_sequences=True, input_shape=(maxlen, len(chars))))
|
||||
model.add(Dropout(0.2))
|
||||
model.add(LSTM(512, return_sequences=False))
|
||||
model.add(Dropout(0.2))
|
||||
model.add(LSTM(128, input_shape=(maxlen, len(chars))))
|
||||
model.add(Dense(len(chars)))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
model.compile(loss='categorical_crossentropy', optimizer='rmsprop')
|
||||
optimizer = RMSprop(lr=0.01)
|
||||
model.compile(loss='categorical_crossentropy', optimizer=optimizer)
|
||||
|
||||
|
||||
def sample(a, temperature=1.0):
|
||||
def sample(preds, temperature=1.0):
|
||||
# helper function to sample an index from a probability array
|
||||
a = np.log(a) / temperature
|
||||
a = np.exp(a) / np.sum(np.exp(a))
|
||||
return np.argmax(np.random.multinomial(1, a, 1))
|
||||
preds = np.asarray(preds).astype('float64')
|
||||
preds = np.log(preds) / temperature
|
||||
exp_preds = np.exp(preds)
|
||||
preds = exp_preds / np.sum(exp_preds)
|
||||
probas = np.random.multinomial(1, preds, 1)
|
||||
return np.argmax(probas)
|
||||
|
||||
# train the model, output generated text after each iteration
|
||||
for iteration in range(1, 60):
|
||||
|
||||
+10
-9
@@ -1,8 +1,7 @@
|
||||
'''Train a simple convnet on the MNIST dataset.
|
||||
'''Trains a simple convnet on the MNIST dataset.
|
||||
|
||||
Run on GPU: THEANO_FLAGS=mode=FAST_RUN,device=gpu,floatX=float32 python mnist_cnn.py
|
||||
|
||||
Get to 99.25% test accuracy after 12 epochs (there is still a lot of margin for parameter tuning).
|
||||
Gets to 99.25% test accuracy after 12 epochs
|
||||
(there is still a lot of margin for parameter tuning).
|
||||
16 seconds per epoch on a GRID K520 GPU.
|
||||
'''
|
||||
|
||||
@@ -12,8 +11,8 @@ np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.datasets import mnist
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Activation, Flatten
|
||||
from keras.layers.convolutional import Convolution2D, MaxPooling2D
|
||||
from keras.layers import Dense, Dropout, Activation, Flatten
|
||||
from keras.layers import Convolution2D, MaxPooling2D
|
||||
from keras.utils import np_utils
|
||||
|
||||
batch_size = 128
|
||||
@@ -64,10 +63,12 @@ model.add(Dropout(0.5))
|
||||
model.add(Dense(nb_classes))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
model.compile(loss='categorical_crossentropy', optimizer='adadelta')
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='adadelta',
|
||||
metrics=['accuracy'])
|
||||
|
||||
model.fit(X_train, Y_train, batch_size=batch_size, nb_epoch=nb_epoch,
|
||||
show_accuracy=True, verbose=1, validation_data=(X_test, Y_test))
|
||||
score = model.evaluate(X_test, Y_test, show_accuracy=True, verbose=0)
|
||||
verbose=1, validation_data=(X_test, Y_test))
|
||||
score = model.evaluate(X_test, Y_test, verbose=0)
|
||||
print('Test score:', score[0])
|
||||
print('Test accuracy:', score[1])
|
||||
|
||||
+12
-27
@@ -3,7 +3,7 @@ with pixel-by-pixel sequential MNIST in
|
||||
"A Simple Way to Initialize Recurrent Networks of Rectified Linear Units"
|
||||
by Quoc V. Le, Navdeep Jaitly, Geoffrey E. Hinton
|
||||
|
||||
arXiv:1504.00941v2 [cs.NE] 7 Apr 201
|
||||
arXiv:1504.00941v2 [cs.NE] 7 Apr 2015
|
||||
http://arxiv.org/pdf/1504.00941v2.pdf
|
||||
|
||||
Optimizer is replaced with RMSprop which yields more stable and steady
|
||||
@@ -14,18 +14,15 @@ Reaches 0.93 train/test accuracy after 900 epochs
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
import numpy as np
|
||||
np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.datasets import mnist
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Activation
|
||||
from keras.layers import Dense, Activation
|
||||
from keras.layers import SimpleRNN
|
||||
from keras.initializations import normal, identity
|
||||
from keras.layers.recurrent import SimpleRNN, LSTM
|
||||
from keras.optimizers import RMSprop
|
||||
from keras.utils import np_utils
|
||||
|
||||
|
||||
batch_size = 32
|
||||
nb_classes = 10
|
||||
nb_epochs = 200
|
||||
@@ -54,32 +51,20 @@ Y_test = np_utils.to_categorical(y_test, nb_classes)
|
||||
print('Evaluate IRNN...')
|
||||
model = Sequential()
|
||||
model.add(SimpleRNN(output_dim=hidden_units,
|
||||
init=lambda shape: normal(shape, scale=0.001),
|
||||
inner_init=lambda shape: identity(shape, scale=1.0),
|
||||
activation='relu', input_shape=X_train.shape[1:]))
|
||||
init=lambda shape, name: normal(shape, scale=0.001, name=name),
|
||||
inner_init=lambda shape, name: identity(shape, scale=1.0, name=name),
|
||||
activation='relu',
|
||||
input_shape=X_train.shape[1:]))
|
||||
model.add(Dense(nb_classes))
|
||||
model.add(Activation('softmax'))
|
||||
rmsprop = RMSprop(lr=learning_rate)
|
||||
model.compile(loss='categorical_crossentropy', optimizer=rmsprop)
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer=rmsprop,
|
||||
metrics=['accuracy'])
|
||||
|
||||
model.fit(X_train, Y_train, batch_size=batch_size, nb_epoch=nb_epochs,
|
||||
show_accuracy=True, verbose=1, validation_data=(X_test, Y_test))
|
||||
verbose=1, validation_data=(X_test, Y_test))
|
||||
|
||||
scores = model.evaluate(X_test, Y_test, show_accuracy=True, verbose=0)
|
||||
scores = model.evaluate(X_test, Y_test, verbose=0)
|
||||
print('IRNN test score:', scores[0])
|
||||
print('IRNN test accuracy:', scores[1])
|
||||
|
||||
print('Compare to LSTM...')
|
||||
model = Sequential()
|
||||
model.add(LSTM(hidden_units, input_shape=X_train.shape[1:]))
|
||||
model.add(Dense(nb_classes))
|
||||
model.add(Activation('softmax'))
|
||||
rmsprop = RMSprop(lr=learning_rate)
|
||||
model.compile(loss='categorical_crossentropy', optimizer=rmsprop)
|
||||
|
||||
model.fit(X_train, Y_train, batch_size=batch_size, nb_epoch=nb_epochs,
|
||||
show_accuracy=True, verbose=1, validation_data=(X_test, Y_test))
|
||||
|
||||
scores = model.evaluate(X_test, Y_test, show_accuracy=True, verbose=0)
|
||||
print('LSTM test score:', scores[0])
|
||||
print('LSTM test accuracy:', scores[1])
|
||||
|
||||
+11
-10
@@ -1,6 +1,6 @@
|
||||
'''Train a simple deep NN on the MNIST dataset.
|
||||
'''Trains a simple deep NN on the MNIST dataset.
|
||||
|
||||
Get to 98.40% test accuracy after 20 epochs
|
||||
Gets to 98.40% test accuracy after 20 epochs
|
||||
(there is *a lot* of margin for parameter tuning).
|
||||
2 seconds per epoch on a K520 GPU.
|
||||
'''
|
||||
@@ -46,14 +46,15 @@ model.add(Dropout(0.2))
|
||||
model.add(Dense(10))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
rms = RMSprop()
|
||||
model.compile(loss='categorical_crossentropy', optimizer=rms)
|
||||
model.summary()
|
||||
|
||||
model.fit(X_train, Y_train,
|
||||
batch_size=batch_size, nb_epoch=nb_epoch,
|
||||
show_accuracy=True, verbose=2,
|
||||
validation_data=(X_test, Y_test))
|
||||
score = model.evaluate(X_test, Y_test,
|
||||
show_accuracy=True, verbose=0)
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer=RMSprop(),
|
||||
metrics=['accuracy'])
|
||||
|
||||
history = model.fit(X_train, Y_train,
|
||||
batch_size=batch_size, nb_epoch=nb_epoch,
|
||||
verbose=1, validation_data=(X_test, Y_test))
|
||||
score = model.evaluate(X_test, Y_test, verbose=0)
|
||||
print('Test score:', score[0])
|
||||
print('Test accuracy:', score[1])
|
||||
|
||||
@@ -7,8 +7,6 @@ for mode details).
|
||||
[1] "Dimensionality Reduction by Learning an Invariant Mapping"
|
||||
http://yann.lecun.com/exdb/publis/pdf/hadsell-chopra-lecun-06.pdf
|
||||
|
||||
Run on GPU: THEANO_FLAGS=mode=FAST_RUN,device=gpu,floatX=float32 python mnist_siamese_graph.py
|
||||
|
||||
Gets to 99.5% test accuracy after 20 epochs.
|
||||
3 seconds per epoch on a Titan X GPU
|
||||
'''
|
||||
@@ -19,25 +17,28 @@ np.random.seed(1337) # for reproducibility
|
||||
|
||||
import random
|
||||
from keras.datasets import mnist
|
||||
from keras.models import Sequential, Graph
|
||||
from keras.layers.core import Dense, Dropout, Lambda
|
||||
from keras.models import Sequential, Model
|
||||
from keras.layers import Dense, Dropout, Input, Lambda
|
||||
from keras.optimizers import SGD, RMSprop
|
||||
from keras import backend as K
|
||||
|
||||
|
||||
def euclidean_distance(inputs):
|
||||
assert len(inputs) == 2, ('Euclidean distance needs '
|
||||
'2 inputs, %d given' % len(inputs))
|
||||
u, v = inputs.values()
|
||||
return K.sqrt(K.sum(K.square(u - v), axis=1, keepdims=True))
|
||||
def euclidean_distance(vects):
|
||||
x, y = vects
|
||||
return K.sqrt(K.sum(K.square(x - y), axis=1, keepdims=True))
|
||||
|
||||
|
||||
def contrastive_loss(y, d):
|
||||
def eucl_dist_output_shape(shapes):
|
||||
shape1, shape2 = shapes
|
||||
return (shape1[0], 1)
|
||||
|
||||
|
||||
def contrastive_loss(y_true, y_pred):
|
||||
'''Contrastive loss from Hadsell-et-al.'06
|
||||
http://yann.lecun.com/exdb/publis/pdf/hadsell-chopra-lecun-06.pdf
|
||||
'''
|
||||
margin = 1
|
||||
return K.mean(y * K.square(d) + (1 - y) * K.square(K.maximum(margin - d, 0)))
|
||||
return K.mean(y_true * K.square(y_pred) + (1 - y_true) * K.square(K.maximum(margin - y_pred, 0)))
|
||||
|
||||
|
||||
def create_pairs(x, digit_indices):
|
||||
@@ -98,26 +99,31 @@ te_pairs, te_y = create_pairs(X_test, digit_indices)
|
||||
# network definition
|
||||
base_network = create_base_network(input_dim)
|
||||
|
||||
g = Graph()
|
||||
g.add_input(name='input_a', input_shape=(input_dim,))
|
||||
g.add_input(name='input_b', input_shape=(input_dim,))
|
||||
g.add_shared_node(base_network, name='shared', inputs=['input_a', 'input_b'],
|
||||
merge_mode='join')
|
||||
g.add_node(Lambda(euclidean_distance), name='d', input='shared')
|
||||
g.add_output(name='output', input='d')
|
||||
input_a = Input(shape=(input_dim,))
|
||||
input_b = Input(shape=(input_dim,))
|
||||
|
||||
# because we re-use the same instance `base_network`,
|
||||
# the weights of the network
|
||||
# will be shared across the two branches
|
||||
processed_a = base_network(input_a)
|
||||
processed_b = base_network(input_b)
|
||||
|
||||
distance = Lambda(euclidean_distance, output_shape=eucl_dist_output_shape)([processed_a, processed_b])
|
||||
|
||||
model = Model(input=[input_a, input_b], output=distance)
|
||||
|
||||
# train
|
||||
rms = RMSprop()
|
||||
g.compile(loss={'output': contrastive_loss}, optimizer=rms)
|
||||
g.fit({'input_a': tr_pairs[:, 0], 'input_b': tr_pairs[:, 1], 'output': tr_y},
|
||||
validation_data={'input_a': te_pairs[:, 0], 'input_b': te_pairs[:, 1], 'output': te_y},
|
||||
batch_size=128,
|
||||
nb_epoch=nb_epoch)
|
||||
model.compile(loss=contrastive_loss, optimizer=rms)
|
||||
model.fit([tr_pairs[:, 0], tr_pairs[:, 1]], tr_y,
|
||||
validation_data=([te_pairs[:, 0], te_pairs[:, 1]], te_y),
|
||||
batch_size=128,
|
||||
nb_epoch=nb_epoch)
|
||||
|
||||
# compute final accuracy on training and test sets
|
||||
pred = g.predict({'input_a': tr_pairs[:, 0], 'input_b': tr_pairs[:, 1]})['output']
|
||||
pred = model.predict([tr_pairs[:, 0], tr_pairs[:, 1]])
|
||||
tr_acc = compute_accuracy(pred, tr_y)
|
||||
pred = g.predict({'input_a': te_pairs[:, 0], 'input_b': te_pairs[:, 1]})['output']
|
||||
pred = model.predict([te_pairs[:, 0], te_pairs[:, 1]])
|
||||
te_acc = compute_accuracy(pred, te_y)
|
||||
|
||||
print('* Accuracy on training set: %0.2f%%' % (100 * tr_acc))
|
||||
|
||||
@@ -0,0 +1,94 @@
|
||||
'''Example of how to use sklearn wrapper
|
||||
|
||||
Builds simple CNN models on MNIST and uses sklearn's GridSearchCV to find best model
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
import numpy as np
|
||||
np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.datasets import mnist
|
||||
from keras.models import Sequential
|
||||
from keras.layers import Dense, Dropout, Activation, Flatten
|
||||
from keras.layers import Convolution2D, MaxPooling2D
|
||||
from keras.utils import np_utils
|
||||
from keras.wrappers.scikit_learn import KerasClassifier
|
||||
from sklearn.grid_search import GridSearchCV
|
||||
|
||||
|
||||
nb_classes = 10
|
||||
|
||||
# input image dimensions
|
||||
img_rows, img_cols = 28, 28
|
||||
|
||||
# load training data and do basic data normalization
|
||||
(X_train, y_train), (X_test, y_test) = mnist.load_data()
|
||||
X_train = X_train.reshape(X_train.shape[0], 1, img_rows, img_cols)
|
||||
X_test = X_test.reshape(X_test.shape[0], 1, img_rows, img_cols)
|
||||
X_train = X_train.astype('float32')
|
||||
X_test = X_test.astype('float32')
|
||||
X_train /= 255
|
||||
X_test /= 255
|
||||
|
||||
# convert class vectors to binary class matrices
|
||||
y_train = np_utils.to_categorical(y_train, nb_classes)
|
||||
y_test = np_utils.to_categorical(y_test, nb_classes)
|
||||
|
||||
def make_model(dense_layer_sizes, nb_filters, nb_conv, nb_pool):
|
||||
'''Creates model comprised of 2 convolutional layers followed by dense layers
|
||||
|
||||
dense_layer_sizes: List of layer sizes. This list has one number for each layer
|
||||
nb_filters: Number of convolutional filters in each convolutional layer
|
||||
nb_conv: Convolutional kernel size
|
||||
nb_pool: Size of pooling area for max pooling
|
||||
'''
|
||||
|
||||
model = Sequential()
|
||||
|
||||
model.add(Convolution2D(nb_filters, nb_conv, nb_conv,
|
||||
border_mode='valid',
|
||||
input_shape=(1, img_rows, img_cols)))
|
||||
model.add(Activation('relu'))
|
||||
model.add(Convolution2D(nb_filters, nb_conv, nb_conv))
|
||||
model.add(Activation('relu'))
|
||||
model.add(MaxPooling2D(pool_size=(nb_pool, nb_pool)))
|
||||
model.add(Dropout(0.25))
|
||||
|
||||
model.add(Flatten())
|
||||
for layer_size in dense_layer_sizes:
|
||||
model.add(Dense(layer_size))
|
||||
model.add(Activation('relu'))
|
||||
model.add(Dropout(0.5))
|
||||
model.add(Dense(nb_classes))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='adadelta',
|
||||
metrics=['accuracy'])
|
||||
|
||||
return model
|
||||
|
||||
dense_size_candidates = [[32], [64], [32, 32], [64, 64]]
|
||||
my_classifier = KerasClassifier(make_model, batch_size=32)
|
||||
validator = GridSearchCV(my_classifier,
|
||||
param_grid={'dense_layer_sizes': dense_size_candidates,
|
||||
# nb_epoch is avail for tuning even when not
|
||||
# an argument to model building function
|
||||
'nb_epoch': [3, 6],
|
||||
'nb_filters': [8],
|
||||
'nb_conv': [3],
|
||||
'nb_pool': [2]},
|
||||
scoring='log_loss',
|
||||
n_jobs=1)
|
||||
validator.fit(X_train, y_train)
|
||||
|
||||
print('The parameters of the best model are: ')
|
||||
print(validator.best_params_)
|
||||
|
||||
# validator.best_estimator_ returns sklearn-wrapped version of best model.
|
||||
# validator.best_estimator_.model returns the (unwrapped) keras model
|
||||
best_model = validator.best_estimator_.model
|
||||
metric_names = best_model.metrics_names
|
||||
metric_values = best_model.evaluate(X_test, y_test)
|
||||
for metric, value in zip(metric_names, metric_values):
|
||||
print(metric, ': ', value)
|
||||
@@ -19,8 +19,8 @@ np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.datasets import mnist
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Activation, Flatten
|
||||
from keras.layers.convolutional import Convolution2D, MaxPooling2D
|
||||
from keras.layers import Dense, Dropout, Activation, Flatten
|
||||
from keras.layers import Convolution2D, MaxPooling2D
|
||||
from keras.utils import np_utils
|
||||
|
||||
|
||||
@@ -55,15 +55,17 @@ def train_model(model, train, test, nb_classes):
|
||||
Y_train = np_utils.to_categorical(train[1], nb_classes)
|
||||
Y_test = np_utils.to_categorical(test[1], nb_classes)
|
||||
|
||||
model.compile(loss='categorical_crossentropy', optimizer='adadelta')
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='adadelta',
|
||||
metrics=['accuracy'])
|
||||
|
||||
t = now()
|
||||
model.fit(X_train, Y_train,
|
||||
batch_size=batch_size, nb_epoch=nb_epoch,
|
||||
show_accuracy=True, verbose=1,
|
||||
verbose=1,
|
||||
validation_data=(X_test, Y_test))
|
||||
print('Training time: %s' % (now() - t))
|
||||
score = model.evaluate(X_test, Y_test, show_accuracy=True, verbose=0)
|
||||
score = model.evaluate(X_test, Y_test, verbose=0)
|
||||
print('Test score:', score[0])
|
||||
print('Test accuracy:', score[1])
|
||||
|
||||
|
||||
@@ -14,7 +14,7 @@ e.g.:
|
||||
python neural_style_transfer.py img/tuebingen.jpg img/starry_night.jpg results/my_result
|
||||
```
|
||||
|
||||
It is preferrable to run this script on GPU, for speed.
|
||||
It is preferable to run this script on GPU, for speed.
|
||||
If running on CPU, prefer the TensorFlow backend (much faster).
|
||||
|
||||
Example result: https://twitter.com/fchollet/status/686631033085677568
|
||||
@@ -34,7 +34,7 @@ the pixels of the combination image, giving it visual coherence.
|
||||
|
||||
- The style loss is where the deep learning keeps in --that one is defined
|
||||
using a deep convolutional neural network. Precisely, it consists in a sum of
|
||||
L2 distances betwen the Gram matrices of the representations of
|
||||
L2 distances between the Gram matrices of the representations of
|
||||
the base image and the style reference image, extracted from
|
||||
different layers of a convnet (trained on ImageNet). The general idea
|
||||
is to capture color/texture information at different spatial
|
||||
@@ -58,7 +58,7 @@ import argparse
|
||||
import h5py
|
||||
|
||||
from keras.models import Sequential
|
||||
from keras.layers.convolutional import Convolution2D, ZeroPadding2D, MaxPooling2D
|
||||
from keras.layers import Convolution2D, ZeroPadding2D, MaxPooling2D
|
||||
from keras import backend as K
|
||||
|
||||
parser = argparse.ArgumentParser(description='Neural style transfer with Keras.')
|
||||
@@ -80,6 +80,7 @@ total_variation_weight = 1.
|
||||
style_weight = 1.
|
||||
content_weight = 0.025
|
||||
|
||||
|
||||
# dimensions of the generated picture.
|
||||
img_width = 400
|
||||
img_height = 400
|
||||
@@ -88,13 +89,21 @@ assert img_height == img_width, 'Due to the use of the Gram matrix, width and he
|
||||
# util function to open, resize and format pictures into appropriate tensors
|
||||
def preprocess_image(image_path):
|
||||
img = imresize(imread(image_path), (img_width, img_height))
|
||||
img = img.transpose((2, 0, 1)).astype('float64')
|
||||
img = img[:, :, ::-1].astype('float64')
|
||||
img[:, :, 0] -= 103.939
|
||||
img[:, :, 1] -= 116.779
|
||||
img[:, :, 2] -= 123.68
|
||||
img = img.transpose((2, 0, 1))
|
||||
img = np.expand_dims(img, axis=0)
|
||||
return img
|
||||
|
||||
# util function to convert a tensor into a valid image
|
||||
def deprocess_image(x):
|
||||
x = x.transpose((1, 2, 0))
|
||||
x[:, :, 0] += 103.939
|
||||
x[:, :, 1] += 116.779
|
||||
x[:, :, 2] += 123.68
|
||||
x = x[:, :, ::-1]
|
||||
x = np.clip(x, 0, 255).astype('uint8')
|
||||
return x
|
||||
|
||||
@@ -111,8 +120,8 @@ input_tensor = K.concatenate([base_image,
|
||||
combination_image], axis=0)
|
||||
|
||||
# build the VGG16 network with our 3 images as input
|
||||
first_layer = ZeroPadding2D((1, 1), input_shape=(3, img_width, img_height))
|
||||
first_layer.input = input_tensor
|
||||
first_layer = ZeroPadding2D((1, 1))
|
||||
first_layer.set_input(input_tensor, shape=(3, 3, img_width, img_height))
|
||||
|
||||
model = Sequential()
|
||||
model.add(first_layer)
|
||||
@@ -168,7 +177,7 @@ f.close()
|
||||
print('Model loaded.')
|
||||
|
||||
# get the symbolic outputs of each "key" layer (we gave them unique names).
|
||||
outputs_dict = dict([(layer.name, layer.get_output()) for layer in model.layers])
|
||||
outputs_dict = dict([(layer.name, layer.output) for layer in model.layers])
|
||||
|
||||
# compute the neural style loss
|
||||
# first we need to define 4 util functions
|
||||
@@ -275,6 +284,9 @@ evaluator = Evaluator()
|
||||
# run scipy-based optimization (L-BFGS) over the pixels of the generated image
|
||||
# so as to minimize the neural style loss
|
||||
x = np.random.uniform(0, 255, (1, 3, img_width, img_height))
|
||||
x[0, 0, :, :] -= 103.939
|
||||
x[0, 1, :, :] -= 116.779
|
||||
x[0, 2, :, :] -= 123.68
|
||||
for i in range(10):
|
||||
print('Start of iteration', i)
|
||||
start_time = time.time()
|
||||
@@ -282,7 +294,7 @@ for i in range(10):
|
||||
fprime=evaluator.grads, maxfun=20)
|
||||
print('Current loss value:', min_val)
|
||||
# save current generated image
|
||||
img = deprocess_image(x.reshape((3, img_width, img_height)))
|
||||
img = deprocess_image(x.copy().reshape((3, img_width, img_height)))
|
||||
fname = result_prefix + '_at_iteration_%d.png' % i
|
||||
imsave(fname, img)
|
||||
end_time = time.time()
|
||||
|
||||
@@ -0,0 +1,144 @@
|
||||
'''This script loads pre-trained word embeddings (GloVe embeddings)
|
||||
into a frozen Keras Embedding layer, and uses it to
|
||||
train a text classification model on the 20 Newsgroup dataset
|
||||
(classication of newsgroup messages into 20 different categories).
|
||||
|
||||
GloVe embedding data can be found at:
|
||||
http://nlp.stanford.edu/data/glove.6B.zip
|
||||
(source page: http://nlp.stanford.edu/projects/glove/)
|
||||
|
||||
20 Newsgroup data can be found at:
|
||||
http://www.cs.cmu.edu/afs/cs.cmu.edu/project/theo-20/www/data/news20.html
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
import os
|
||||
import numpy as np
|
||||
np.random.seed(1337)
|
||||
|
||||
from keras.preprocessing.text import Tokenizer
|
||||
from keras.preprocessing.sequence import pad_sequences
|
||||
from keras.utils.np_utils import to_categorical
|
||||
from keras.layers import Dense, Input, Flatten
|
||||
from keras.layers import Conv1D, MaxPooling1D, Embedding
|
||||
from keras.models import Model
|
||||
import sys
|
||||
|
||||
BASE_DIR = ''
|
||||
GLOVE_DIR = BASE_DIR + '/glove.6B/'
|
||||
TEXT_DATA_DIR = BASE_DIR + '/20_newsgroup/'
|
||||
MAX_SEQUENCE_LENGTH = 1000
|
||||
MAX_NB_WORDS = 20000
|
||||
EMBEDDING_DIM = 100
|
||||
VALIDATION_SPLIT = 0.2
|
||||
|
||||
# first, build index mapping words in the embeddings set
|
||||
# to their embedding vector
|
||||
|
||||
print('Indexing word vectors.')
|
||||
|
||||
embeddings_index = {}
|
||||
f = open(os.path.join(GLOVE_DIR, 'glove.6B.100d.txt'))
|
||||
for line in f:
|
||||
values = line.split()
|
||||
word = values[0]
|
||||
coefs = np.asarray(values[1:], dtype='float32')
|
||||
embeddings_index[word] = coefs
|
||||
f.close()
|
||||
|
||||
print('Found %s word vectors.' % len(embeddings_index))
|
||||
|
||||
# second, prepare text samples and their labels
|
||||
print('Processing text dataset')
|
||||
|
||||
texts = [] # list of text samples
|
||||
labels_index = {} # dictionary mapping label name to numeric id
|
||||
labels = [] # list of label ids
|
||||
for name in sorted(os.listdir(TEXT_DATA_DIR)):
|
||||
path = os.path.join(TEXT_DATA_DIR, name)
|
||||
if os.path.isdir(path):
|
||||
label_id = len(labels_index)
|
||||
labels_index[name] = label_id
|
||||
for fname in sorted(os.listdir(path)):
|
||||
if fname.isdigit():
|
||||
fpath = os.path.join(path, fname)
|
||||
if sys.version_info < (3,):
|
||||
f = open(fpath)
|
||||
else:
|
||||
f = open(fpath, encoding='latin-1')
|
||||
texts.append(f.read())
|
||||
f.close()
|
||||
labels.append(label_id)
|
||||
|
||||
print('Found %s texts.' % len(texts))
|
||||
|
||||
# finally, vectorize the text samples into a 2D integer tensor
|
||||
tokenizer = Tokenizer(nb_words=MAX_NB_WORDS)
|
||||
tokenizer.fit_on_texts(texts)
|
||||
sequences = tokenizer.texts_to_sequences(texts)
|
||||
|
||||
word_index = tokenizer.word_index
|
||||
print('Found %s unique tokens.' % len(word_index))
|
||||
|
||||
data = pad_sequences(sequences, maxlen=MAX_SEQUENCE_LENGTH)
|
||||
|
||||
labels = to_categorical(np.asarray(labels))
|
||||
print('Shape of data tensor:', data.shape)
|
||||
print('Shape of label tensor:', labels.shape)
|
||||
|
||||
# split the data into a training set and a validation set
|
||||
indices = np.arange(data.shape[0])
|
||||
np.random.shuffle(indices)
|
||||
data = data[indices]
|
||||
labels = labels[indices]
|
||||
nb_validation_samples = int(VALIDATION_SPLIT * data.shape[0])
|
||||
|
||||
x_train = data[:-nb_validation_samples]
|
||||
y_train = labels[:-nb_validation_samples]
|
||||
x_val = data[-nb_validation_samples:]
|
||||
y_val = labels[-nb_validation_samples:]
|
||||
|
||||
print('Preparing embedding matrix.')
|
||||
|
||||
# prepare embedding matrix
|
||||
nb_words = min(MAX_NB_WORDS, len(word_index))
|
||||
embedding_matrix = np.zeros((nb_words + 1, EMBEDDING_DIM))
|
||||
for word, i in word_index.items():
|
||||
if i > MAX_NB_WORDS:
|
||||
continue
|
||||
embedding_vector = embeddings_index.get(word)
|
||||
if embedding_vector is not None:
|
||||
# words not found in embedding index will be all-zeros.
|
||||
embedding_matrix[i] = embedding_vector
|
||||
|
||||
# load pre-trained word embeddings into an Embedding layer
|
||||
# note that we set trainable = False so as to keep the embeddings fixed
|
||||
embedding_layer = Embedding(nb_words + 1,
|
||||
EMBEDDING_DIM,
|
||||
weights=[embedding_matrix],
|
||||
input_length=MAX_SEQUENCE_LENGTH,
|
||||
trainable=False)
|
||||
|
||||
print('Training model.')
|
||||
|
||||
# train a 1D convnet with global maxpooling
|
||||
sequence_input = Input(shape=(MAX_SEQUENCE_LENGTH,), dtype='int32')
|
||||
embedded_sequences = embedding_layer(sequence_input)
|
||||
x = Conv1D(128, 5, activation='relu')(embedded_sequences)
|
||||
x = MaxPooling1D(5)(x)
|
||||
x = Conv1D(128, 5, activation='relu')(x)
|
||||
x = MaxPooling1D(5)(x)
|
||||
x = Conv1D(128, 5, activation='relu')(x)
|
||||
x = MaxPooling1D(35)(x)
|
||||
x = Flatten()(x)
|
||||
x = Dense(128, activation='relu')(x)
|
||||
preds = Dense(len(labels_index), activation='softmax')(x)
|
||||
|
||||
model = Model(sequence_input, preds)
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='rmsprop',
|
||||
metrics=['acc'])
|
||||
|
||||
# happy learning!
|
||||
model.fit(x_train, y_train, validation_data=(x_val, y_val),
|
||||
nb_epoch=2, batch_size=128)
|
||||
@@ -0,0 +1,220 @@
|
||||
'''This script demonstrates how to build a deep residual network
|
||||
using the Keras functional API.
|
||||
|
||||
get_resnet50() returns the deep residual network model (50 layers)
|
||||
|
||||
Please visit Kaiming He's GitHub homepage:
|
||||
https://github.com/KaimingHe
|
||||
for more information.
|
||||
|
||||
The related paper is
|
||||
'Deep Residual Learning for Image Recognition'
|
||||
Kaiming He, Xiangyu Zhang, Shaoqing Ren, Jian Sun
|
||||
http://arxiv.org/abs/1512.03385
|
||||
|
||||
Pretrained weights were converted from Kaiming He's caffe model directly.
|
||||
|
||||
For now we provide weights for the tensorflow backend only,
|
||||
thus use 'tf' dim_ordering (e.g. input_shape=(224, 224, 3) for 224*224 color image)
|
||||
would accelerate the computation, but we also provide weights for 'th' dim_ordering for compatibility.
|
||||
You can set your default dim ordering in your Keras config file at ~/.keras/keras.json
|
||||
|
||||
please donwload them at:
|
||||
http://pan.baidu.com/s/1o8pO2q2 ('th' dim ordering, for China)
|
||||
http://pan.baidu.com/s/1pLanuTt ('tf' dim ordering, for China)
|
||||
|
||||
https://drive.google.com/open?id=0B4ChsjFJvew3NVQ2U041Q0xHRHM ('th' dim ordering, for other countries)
|
||||
https://drive.google.com/open?id=0B4ChsjFJvew3NWN5THdxcTdSWmc ('tf' dim ordering, for other countries)
|
||||
|
||||
@author: BigMoyan, University of Electronic Science and Technology of China
|
||||
'''
|
||||
from __future__ import print_function
|
||||
from keras.layers import merge
|
||||
from keras.layers.convolutional import Convolution2D, MaxPooling2D, ZeroPadding2D, AveragePooling2D
|
||||
from keras.layers.core import Dense, Activation, Flatten
|
||||
from keras.layers.normalization import BatchNormalization
|
||||
from keras.models import Model
|
||||
from keras.layers import Input
|
||||
from keras.preprocessing.image import load_img, img_to_array
|
||||
import keras.backend as K
|
||||
import numpy as np
|
||||
|
||||
# The names of layers in resnet50 are generated with the following format
|
||||
# [type][stage][block]_branch[branch][layer]
|
||||
# type: 'res' for conv layer, 'bn' and 'scale' for BN layer
|
||||
# stage: from '2' to '5', current stage number
|
||||
# block: 'a','b','c'... for different blocks in a stage
|
||||
# branch: '1' for shortcut and '2' for main path
|
||||
# layer: 'a','b','c'... for different layers in a block
|
||||
|
||||
|
||||
def identity_block(input_tensor, kernel_size, filters, stage, block):
|
||||
'''The identity_block is the block that has no conv layer at shortcut
|
||||
|
||||
# Arguments
|
||||
input_tensor: input tensor
|
||||
kernel_size: defualt 3, the kernel size of middle conv layer at main path
|
||||
filters: list of integers, the nb_filters of 3 conv layer at main path
|
||||
stage: integer, current stage label, used for generating layer names
|
||||
block: 'a','b'..., current block label, used for generating layer names
|
||||
'''
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
nb_filter1, nb_filter2, nb_filter3 = filters
|
||||
if dim_ordering == 'tf':
|
||||
bn_axis = 3
|
||||
else:
|
||||
bn_axis = 1
|
||||
conv_name_base = 'res' + str(stage) + block + '_branch'
|
||||
bn_name_base = 'bn' + str(stage) + block + '_branch'
|
||||
|
||||
out = Convolution2D(nb_filter1, 1, 1, dim_ordering=dim_ordering, name=conv_name_base + '2a')(input_tensor)
|
||||
out = BatchNormalization(axis=bn_axis, name=bn_name_base + '2a')(out)
|
||||
out = Activation('relu')(out)
|
||||
|
||||
out = Convolution2D(nb_filter2, kernel_size, kernel_size, border_mode='same',
|
||||
dim_ordering=dim_ordering, name=conv_name_base + '2b')(out)
|
||||
out = BatchNormalization(axis=bn_axis, name=bn_name_base + '2b')(out)
|
||||
out = Activation('relu')(out)
|
||||
|
||||
out = Convolution2D(nb_filter3, 1, 1, dim_ordering=dim_ordering, name=conv_name_base + '2c')(out)
|
||||
out = BatchNormalization(axis=bn_axis, name=bn_name_base + '2c')(out)
|
||||
|
||||
out = merge([out, input_tensor], mode='sum')
|
||||
out = Activation('relu')(out)
|
||||
return out
|
||||
|
||||
|
||||
def conv_block(input_tensor, kernel_size, filters, stage, block, strides=(2, 2)):
|
||||
'''conv_block is the block that has a conv layer at shortcut
|
||||
|
||||
# Arguments
|
||||
input_tensor: input tensor
|
||||
kernel_size: defualt 3, the kernel size of middle conv layer at main path
|
||||
filters: list of integers, the nb_filters of 3 conv layer at main path
|
||||
stage: integer, current stage label, used for generating layer names
|
||||
block: 'a','b'..., current block label, used for generating layer names
|
||||
|
||||
Note that from stage 3, the first conv layer at main path is with subsample=(2,2)
|
||||
And the shortcut should has subsample=(2,2) as well
|
||||
'''
|
||||
nb_filter1, nb_filter2, nb_filter3 = filters
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
if dim_ordering == 'tf':
|
||||
bn_axis = 3
|
||||
else:
|
||||
bn_axis = 1
|
||||
conv_name_base = 'res' + str(stage) + block + '_branch'
|
||||
bn_name_base = 'bn' + str(stage) + block + '_branch'
|
||||
|
||||
out = Convolution2D(nb_filter1, 1, 1, subsample=strides,
|
||||
dim_ordering=dim_ordering, name=conv_name_base + '2a')(input_tensor)
|
||||
out = BatchNormalization(axis=bn_axis, name=bn_name_base + '2a')(out)
|
||||
out = Activation('relu')(out)
|
||||
|
||||
out = Convolution2D(nb_filter2, kernel_size, kernel_size, border_mode='same',
|
||||
dim_ordering=dim_ordering, name=conv_name_base + '2b')(out)
|
||||
out = BatchNormalization(axis=bn_axis, name=bn_name_base + '2b')(out)
|
||||
out = Activation('relu')(out)
|
||||
|
||||
out = Convolution2D(nb_filter3, 1, 1, dim_ordering=dim_ordering, name=conv_name_base + '2c')(out)
|
||||
out = BatchNormalization(axis=bn_axis, name=bn_name_base + '2c')(out)
|
||||
|
||||
shortcut = Convolution2D(nb_filter3, 1, 1, subsample=strides,
|
||||
dim_ordering=dim_ordering, name=conv_name_base + '1')(input_tensor)
|
||||
shortcut = BatchNormalization(axis=bn_axis, name=bn_name_base + '1')(shortcut)
|
||||
|
||||
out = merge([out, shortcut], mode='sum')
|
||||
out = Activation('relu')(out)
|
||||
return out
|
||||
|
||||
|
||||
def read_img(img_path):
|
||||
'''This function returns a preprocessed image
|
||||
'''
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
mean = (103.939, 116.779, 123.68)
|
||||
img = load_img(img_path, target_size=(224, 224))
|
||||
img = img_to_array(img, dim_ordering=dim_ordering)
|
||||
|
||||
if dim_ordering == 'th':
|
||||
img[0, :, :] -= mean[0]
|
||||
img[1, :, :] -= mean[1]
|
||||
img[2, :, :] -= mean[2]
|
||||
# 'RGB'->'BGR'
|
||||
img = img[::-1, :, :]
|
||||
else:
|
||||
img[:, :, 0] -= mean[0]
|
||||
img[:, :, 1] -= mean[1]
|
||||
img[:, :, 2] -= mean[2]
|
||||
img = img[:, :, ::-1]
|
||||
|
||||
img = np.expand_dims(img, axis=0)
|
||||
return img
|
||||
|
||||
|
||||
def get_resnet50():
|
||||
'''This function returns the 50-layer residual network model
|
||||
you should load pretrained weights if you want to use it directly.
|
||||
Note that since the pretrained weights is converted from caffemodel
|
||||
the order of channels for input image should be 'BGR' (the channel order of caffe)
|
||||
'''
|
||||
if K.image_dim_ordering() == 'tf':
|
||||
inp = Input(shape=(224, 224, 3))
|
||||
bn_axis = 3
|
||||
else:
|
||||
inp = Input(shape=(3, 224, 224))
|
||||
bn_axis = 1
|
||||
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
out = ZeroPadding2D((3, 3), dim_ordering=dim_ordering)(inp)
|
||||
out = Convolution2D(64, 7, 7, subsample=(2, 2), dim_ordering=dim_ordering, name='conv1')(out)
|
||||
out = BatchNormalization(axis=bn_axis, name='bn_conv1')(out)
|
||||
out = Activation('relu')(out)
|
||||
out = MaxPooling2D((3, 3), strides=(2, 2), dim_ordering=dim_ordering)(out)
|
||||
|
||||
out = conv_block(out, 3, [64, 64, 256], stage=2, block='a', strides=(1, 1))
|
||||
out = identity_block(out, 3, [64, 64, 256], stage=2, block='b')
|
||||
out = identity_block(out, 3, [64, 64, 256], stage=2, block='c')
|
||||
|
||||
out = conv_block(out, 3, [128, 128, 512], stage=3, block='a')
|
||||
out = identity_block(out, 3, [128, 128, 512], stage=3, block='b')
|
||||
out = identity_block(out, 3, [128, 128, 512], stage=3, block='c')
|
||||
out = identity_block(out, 3, [128, 128, 512], stage=3, block='d')
|
||||
|
||||
out = conv_block(out, 3, [256, 256, 1024], stage=4, block='a')
|
||||
out = identity_block(out, 3, [256, 256, 1024], stage=4, block='b')
|
||||
out = identity_block(out, 3, [256, 256, 1024], stage=4, block='c')
|
||||
out = identity_block(out, 3, [256, 256, 1024], stage=4, block='d')
|
||||
out = identity_block(out, 3, [256, 256, 1024], stage=4, block='e')
|
||||
out = identity_block(out, 3, [256, 256, 1024], stage=4, block='f')
|
||||
|
||||
out = conv_block(out, 3, [512, 512, 2048], stage=5, block='a')
|
||||
out = identity_block(out, 3, [512, 512, 2048], stage=5, block='b')
|
||||
out = identity_block(out, 3, [512, 512, 2048], stage=5, block='c')
|
||||
|
||||
out = AveragePooling2D((7, 7), dim_ordering=dim_ordering)(out)
|
||||
out = Flatten()(out)
|
||||
out = Dense(1000, activation='softmax', name='fc1000')(out)
|
||||
|
||||
model = Model(inp, out)
|
||||
|
||||
return model
|
||||
|
||||
|
||||
if __name__ == '__main__':
|
||||
weights_file = K.image_dim_ordering() + '_dim_ordering_resnet50.h5'
|
||||
resnet_model = get_resnet50()
|
||||
resnet_model.load_weights(weights_file)
|
||||
|
||||
# you may download synset_words from the address given at the begining of this file
|
||||
class_table = open('synset_words.txt', 'r')
|
||||
lines = class_table.readlines()
|
||||
|
||||
test_img1 = read_img('cat.jpg')
|
||||
print('Result for test 1 is:')
|
||||
print(lines[np.argmax(resnet_model.predict(test_img1)[0])])
|
||||
|
||||
test_img2 = read_img('elephant.jpg')
|
||||
print('Result for test 2 is:')
|
||||
print(lines[np.argmax(resnet_model.predict(test_img2)[0])])
|
||||
class_table.close()
|
||||
+11
-10
@@ -1,8 +1,5 @@
|
||||
'''Train and evaluate a simple MLP on the Reuters newswire topic classification task.
|
||||
GPU run command:
|
||||
THEANO_FLAGS=mode=FAST_RUN,device=gpu,floatX=float32 python examples/reuters_mlp.py
|
||||
CPU run command:
|
||||
python examples/reuters_mlp.py
|
||||
'''Trains and evaluate a simple MLP
|
||||
on the Reuters newswire topic classification task.
|
||||
'''
|
||||
|
||||
from __future__ import print_function
|
||||
@@ -11,8 +8,7 @@ np.random.seed(1337) # for reproducibility
|
||||
|
||||
from keras.datasets import reuters
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense, Dropout, Activation
|
||||
from keras.layers.normalization import BatchNormalization
|
||||
from keras.layers import Dense, Dropout, Activation
|
||||
from keras.utils import np_utils
|
||||
from keras.preprocessing.text import Tokenizer
|
||||
|
||||
@@ -49,9 +45,14 @@ model.add(Dropout(0.5))
|
||||
model.add(Dense(nb_classes))
|
||||
model.add(Activation('softmax'))
|
||||
|
||||
model.compile(loss='categorical_crossentropy', optimizer='adam')
|
||||
model.compile(loss='categorical_crossentropy',
|
||||
optimizer='adam',
|
||||
metrics=['accuracy'])
|
||||
|
||||
history = model.fit(X_train, Y_train, nb_epoch=nb_epoch, batch_size=batch_size, verbose=1, show_accuracy=True, validation_split=0.1)
|
||||
score = model.evaluate(X_test, Y_test, batch_size=batch_size, verbose=1, show_accuracy=True)
|
||||
history = model.fit(X_train, Y_train,
|
||||
nb_epoch=nb_epoch, batch_size=batch_size,
|
||||
verbose=1, validation_split=0.1)
|
||||
score = model.evaluate(X_test, Y_test,
|
||||
batch_size=batch_size, verbose=1)
|
||||
print('Test score:', score[0])
|
||||
print('Test accuracy:', score[1])
|
||||
|
||||
@@ -5,8 +5,7 @@ from __future__ import print_function
|
||||
import numpy as np
|
||||
import matplotlib.pyplot as plt
|
||||
from keras.models import Sequential
|
||||
from keras.layers.core import Dense
|
||||
from keras.layers.recurrent import LSTM
|
||||
from keras.layers import Dense, LSTM
|
||||
|
||||
|
||||
# since we are using stateful rnn tsteps can be set to 1
|
||||
@@ -17,7 +16,7 @@ epochs = 25
|
||||
lahead = 1
|
||||
|
||||
|
||||
def gen_cosine_amp(amp=100, period=25, x0=0, xn=50000, step=1, k=0.0001):
|
||||
def gen_cosine_amp(amp=100, period=1000, x0=0, xn=50000, step=1, k=0.0001):
|
||||
"""Generates an absolute cosine time series with the amplitude
|
||||
exponentially decreasing
|
||||
|
||||
@@ -32,7 +31,7 @@ def gen_cosine_amp(amp=100, period=25, x0=0, xn=50000, step=1, k=0.0001):
|
||||
cos = np.zeros(((xn - x0) * step, 1, 1))
|
||||
for i in range(len(cos)):
|
||||
idx = x0 + i * step
|
||||
cos[i, 0, 0] = amp * np.cos(idx / (2 * np.pi * period))
|
||||
cos[i, 0, 0] = amp * np.cos(2 * np.pi * idx / period)
|
||||
cos[i, 0, 0] = cos[i, 0, 0] * np.exp(-k * idx)
|
||||
return cos
|
||||
|
||||
@@ -75,7 +74,7 @@ for i in range(epochs):
|
||||
print('Predicting')
|
||||
predicted_output = model.predict(cos, batch_size=batch_size)
|
||||
|
||||
print('Ploting Results')
|
||||
print('Plotting Results')
|
||||
plt.subplot(2, 1, 1)
|
||||
plt.plot(expected_output)
|
||||
plt.title('Expected')
|
||||
|
||||
@@ -0,0 +1,97 @@
|
||||
'''This script demonstrates how to build a variational autoencoder with Keras.
|
||||
|
||||
Reference: "Auto-Encoding Variational Bayes" https://arxiv.org/abs/1312.6114
|
||||
'''
|
||||
import numpy as np
|
||||
import matplotlib.pyplot as plt
|
||||
|
||||
from keras.layers import Input, Dense, Lambda
|
||||
from keras.models import Model
|
||||
from keras import backend as K
|
||||
from keras import objectives
|
||||
from keras.datasets import mnist
|
||||
|
||||
batch_size = 100
|
||||
original_dim = 784
|
||||
latent_dim = 2
|
||||
intermediate_dim = 256
|
||||
nb_epoch = 50
|
||||
|
||||
x = Input(batch_shape=(batch_size, original_dim))
|
||||
h = Dense(intermediate_dim, activation='relu')(x)
|
||||
z_mean = Dense(latent_dim)(h)
|
||||
z_log_var = Dense(latent_dim)(h)
|
||||
|
||||
|
||||
def sampling(args):
|
||||
z_mean, z_log_var = args
|
||||
epsilon = K.random_normal(shape=(batch_size, latent_dim), mean=0.)
|
||||
return z_mean + K.exp(z_log_var / 2) * epsilon
|
||||
|
||||
# note that "output_shape" isn't necessary with the TensorFlow backend
|
||||
z = Lambda(sampling, output_shape=(latent_dim,))([z_mean, z_log_var])
|
||||
|
||||
# we instantiate these layers separately so as to reuse them later
|
||||
decoder_h = Dense(intermediate_dim, activation='relu')
|
||||
decoder_mean = Dense(original_dim, activation='sigmoid')
|
||||
h_decoded = decoder_h(z)
|
||||
x_decoded_mean = decoder_mean(h_decoded)
|
||||
|
||||
|
||||
def vae_loss(x, x_decoded_mean):
|
||||
xent_loss = original_dim * objectives.binary_crossentropy(x, x_decoded_mean)
|
||||
kl_loss = - 0.5 * K.sum(1 + z_log_var - K.square(z_mean) - K.exp(z_log_var), axis=-1)
|
||||
return xent_loss + kl_loss
|
||||
|
||||
vae = Model(x, x_decoded_mean)
|
||||
vae.compile(optimizer='rmsprop', loss=vae_loss)
|
||||
|
||||
# train the VAE on MNIST digits
|
||||
(x_train, y_train), (x_test, y_test) = mnist.load_data()
|
||||
|
||||
x_train = x_train.astype('float32') / 255.
|
||||
x_test = x_test.astype('float32') / 255.
|
||||
x_train = x_train.reshape((len(x_train), np.prod(x_train.shape[1:])))
|
||||
x_test = x_test.reshape((len(x_test), np.prod(x_test.shape[1:])))
|
||||
|
||||
vae.fit(x_train, x_train,
|
||||
shuffle=True,
|
||||
nb_epoch=nb_epoch,
|
||||
batch_size=batch_size,
|
||||
validation_data=(x_test, x_test))
|
||||
|
||||
# build a model to project inputs on the latent space
|
||||
encoder = Model(x, z_mean)
|
||||
|
||||
# display a 2D plot of the digit classes in the latent space
|
||||
x_test_encoded = encoder.predict(x_test, batch_size=batch_size)
|
||||
plt.figure(figsize=(6, 6))
|
||||
plt.scatter(x_test_encoded[:, 0], x_test_encoded[:, 1], c=y_test)
|
||||
plt.colorbar()
|
||||
plt.show()
|
||||
|
||||
# build a digit generator that can sample from the learned distribution
|
||||
decoder_input = Input(shape=(latent_dim,))
|
||||
_h_decoded = decoder_h(decoder_input)
|
||||
_x_decoded_mean = decoder_mean(_h_decoded)
|
||||
generator = Model(decoder_input, _x_decoded_mean)
|
||||
|
||||
# display a 2D manifold of the digits
|
||||
n = 15 # figure with 15x15 digits
|
||||
digit_size = 28
|
||||
figure = np.zeros((digit_size * n, digit_size * n))
|
||||
# we will sample n points within [-15, 15] standard deviations
|
||||
grid_x = np.linspace(-15, 15, n)
|
||||
grid_y = np.linspace(-15, 15, n)
|
||||
|
||||
for i, yi in enumerate(grid_x):
|
||||
for j, xi in enumerate(grid_y):
|
||||
z_sample = np.array([[xi, yi]])
|
||||
x_decoded = generator.predict(z_sample)
|
||||
digit = x_decoded[0].reshape(digit_size, digit_size)
|
||||
figure[i * digit_size: (i + 1) * digit_size,
|
||||
j * digit_size: (j + 1) * digit_size] = digit
|
||||
|
||||
plt.figure(figsize=(10, 10))
|
||||
plt.imshow(figure)
|
||||
plt.show()
|
||||
@@ -0,0 +1,124 @@
|
||||
'''This script demonstrates how to build a variational autoencoder with Keras and deconvolution layers.
|
||||
|
||||
Reference: "Auto-Encoding Variational Bayes" https://arxiv.org/abs/1312.6114
|
||||
'''
|
||||
import numpy as np
|
||||
import matplotlib.pyplot as plt
|
||||
|
||||
from keras.layers import Input, Dense, Lambda, Flatten, Reshape
|
||||
from keras.layers import Convolution2D, Deconvolution2D, MaxPooling2D
|
||||
from keras.models import Model
|
||||
from keras import backend as K
|
||||
from keras import objectives
|
||||
from keras.datasets import mnist
|
||||
|
||||
# input image dimensions
|
||||
img_rows, img_cols, img_chns = 28, 28, 1
|
||||
# number of convolutional filters to use
|
||||
nb_filters = 32
|
||||
# convolution kernel size
|
||||
nb_conv = 3
|
||||
|
||||
batch_size = 16
|
||||
original_dim = (img_chns, img_rows, img_cols)
|
||||
latent_dim = 2
|
||||
intermediate_dim = 128
|
||||
epsilon_std = 0.01
|
||||
nb_epoch = 5
|
||||
|
||||
|
||||
x = Input(batch_shape=(batch_size,) + original_dim)
|
||||
c = Convolution2D(nb_filters, nb_conv, nb_conv, border_mode='same', activation='relu')(x)
|
||||
f = Flatten()(c)
|
||||
h = Dense(intermediate_dim, activation='relu')(f)
|
||||
|
||||
z_mean = Dense(latent_dim)(h)
|
||||
z_log_var = Dense(latent_dim)(h)
|
||||
|
||||
|
||||
def sampling(args):
|
||||
z_mean, z_log_var = args
|
||||
epsilon = K.random_normal(shape=(batch_size, latent_dim),
|
||||
mean=0., std=epsilon_std)
|
||||
return z_mean + K.exp(z_log_var) * epsilon
|
||||
|
||||
# note that "output_shape" isn't necessary with the TensorFlow backend
|
||||
# so you could write `Lambda(sampling)([z_mean, z_log_var])`
|
||||
z = Lambda(sampling, output_shape=(latent_dim,))([z_mean, z_log_var])
|
||||
|
||||
# we instantiate these layers separately so as to reuse them later
|
||||
decoder_h = Dense(intermediate_dim, activation='relu')
|
||||
decoder_f = Dense(nb_filters*img_rows*img_cols, activation='relu')
|
||||
decoder_c = Reshape((nb_filters, img_rows, img_cols))
|
||||
decoder_mean = Deconvolution2D(img_chns, nb_conv, nb_conv,
|
||||
(batch_size, img_chns, img_rows, img_cols),
|
||||
border_mode='same')
|
||||
|
||||
h_decoded = decoder_h(z)
|
||||
f_decoded = decoder_f(h_decoded)
|
||||
c_decoded = decoder_c(f_decoded)
|
||||
x_decoded_mean = decoder_mean(c_decoded)
|
||||
|
||||
|
||||
def vae_loss(x, x_decoded_mean):
|
||||
# NOTE: binary_crossentropy expects a batch_size by dim for x and x_decoded_mean, so we MUST flatten these!
|
||||
x = K.flatten(x)
|
||||
x_decoded_mean = K.flatten(x_decoded_mean)
|
||||
xent_loss = objectives.binary_crossentropy(x, x_decoded_mean)
|
||||
kl_loss = - 0.5 * K.mean(1 + z_log_var - K.square(z_mean) - K.exp(z_log_var), axis=-1)
|
||||
return xent_loss + kl_loss
|
||||
|
||||
vae = Model(x, x_decoded_mean)
|
||||
vae.compile(optimizer='rmsprop', loss=vae_loss)
|
||||
vae.summary()
|
||||
|
||||
# train the VAE on MNIST digits
|
||||
(x_train, y_train), (x_test, y_test) = mnist.load_data()
|
||||
|
||||
x_train = x_train.astype('float32')[:, None, :, :] / 255.
|
||||
x_test = x_test.astype('float32')[:, None, :, :] / 255.
|
||||
|
||||
vae.fit(x_train, x_train,
|
||||
shuffle=True,
|
||||
nb_epoch=nb_epoch,
|
||||
batch_size=batch_size,
|
||||
validation_data=(x_test, x_test))
|
||||
|
||||
|
||||
# build a model to project inputs on the latent space
|
||||
encoder = Model(x, z_mean)
|
||||
|
||||
# display a 2D plot of the digit classes in the latent space
|
||||
x_test_encoded = encoder.predict(x_test, batch_size=batch_size)
|
||||
plt.figure(figsize=(6, 6))
|
||||
plt.scatter(x_test_encoded[:, 0], x_test_encoded[:, 1], c=y_test)
|
||||
plt.colorbar()
|
||||
plt.show()
|
||||
|
||||
# build a digit generator that can sample from the learned distribution
|
||||
decoder_input = Input(shape=(latent_dim,))
|
||||
_h_decoded = decoder_h(decoder_input)
|
||||
_f_decoded = decoder_f(_h_decoded)
|
||||
_c_decoded = decoder_c(_f_decoded)
|
||||
_x_decoded_mean = decoder_mean(_c_decoded)
|
||||
generator = Model(decoder_input, _x_decoded_mean)
|
||||
|
||||
# display a 2D manifold of the digits
|
||||
n = 15 # figure with 15x15 digits
|
||||
digit_size = 28
|
||||
figure = np.zeros((digit_size * n, digit_size * n))
|
||||
# we will sample n points within [-15, 15] standard deviations
|
||||
grid_x = np.linspace(-15, 15, n)
|
||||
grid_y = np.linspace(-15, 15, n)
|
||||
|
||||
for i, yi in enumerate(grid_x):
|
||||
for j, xi in enumerate(grid_y):
|
||||
z_sample = np.array([[xi, yi]])
|
||||
x_decoded = generator.predict(z_sample)
|
||||
digit = x_decoded[0].reshape(digit_size, digit_size)
|
||||
figure[i * digit_size: (i + 1) * digit_size,
|
||||
j * digit_size: (j + 1) * digit_size] = digit
|
||||
|
||||
plt.figure(figsize=(10, 10))
|
||||
plt.imshow(figure)
|
||||
plt.show()
|
||||
+18
-1
@@ -1 +1,18 @@
|
||||
__version__ = '0.3.3'
|
||||
from __future__ import absolute_import
|
||||
from . import backend
|
||||
from . import datasets
|
||||
from . import engine
|
||||
from . import layers
|
||||
from . import preprocessing
|
||||
from . import utils
|
||||
from . import wrappers
|
||||
from . import callbacks
|
||||
from . import constraints
|
||||
from . import initializations
|
||||
from . import metrics
|
||||
from . import models
|
||||
from . import objectives
|
||||
from . import optimizers
|
||||
from . import regularizers
|
||||
|
||||
__version__ = '1.0.7'
|
||||
|
||||
@@ -19,6 +19,10 @@ def softplus(x):
|
||||
return K.softplus(x)
|
||||
|
||||
|
||||
def softsign(x):
|
||||
return K.softsign(x)
|
||||
|
||||
|
||||
def relu(x, alpha=0., max_value=None):
|
||||
return K.relu(x, alpha=alpha, max_value=max_value)
|
||||
|
||||
@@ -44,4 +48,6 @@ def linear(x):
|
||||
|
||||
from .utils.generic_utils import get_from_module
|
||||
def get(identifier):
|
||||
if identifier is None:
|
||||
return linear
|
||||
return get_from_module(identifier, globals(), 'activation function')
|
||||
|
||||
@@ -3,7 +3,15 @@ from __future__ import print_function
|
||||
import os
|
||||
import json
|
||||
import sys
|
||||
from .common import epsilon, floatx, set_epsilon, set_floatx
|
||||
from .common import epsilon
|
||||
from .common import floatx
|
||||
from .common import set_epsilon
|
||||
from .common import set_floatx
|
||||
from .common import get_uid
|
||||
from .common import cast_to_floatx
|
||||
from .common import image_dim_ordering
|
||||
from .common import set_image_dim_ordering
|
||||
from .common import is_keras_tensor
|
||||
|
||||
_keras_base_dir = os.path.expanduser('~')
|
||||
if not os.access(_keras_base_dir, os.W_OK):
|
||||
@@ -23,24 +31,28 @@ if os.path.exists(_config_path):
|
||||
assert type(_epsilon) == float
|
||||
_backend = _config.get('backend', _BACKEND)
|
||||
assert _backend in {'theano', 'tensorflow'}
|
||||
_image_dim_ordering = _config.get('image_dim_ordering', image_dim_ordering())
|
||||
assert _image_dim_ordering in {'tf', 'th'}
|
||||
|
||||
set_floatx(_floatx)
|
||||
set_epsilon(_epsilon)
|
||||
set_image_dim_ordering(_image_dim_ordering)
|
||||
_BACKEND = _backend
|
||||
else:
|
||||
# save config file, for easy edition
|
||||
_config = {'floatx': floatx(),
|
||||
'epsilon': epsilon(),
|
||||
'backend': _BACKEND}
|
||||
with open(_config_path, 'w') as f:
|
||||
# add new line in order for bash 'cat' display the content correctly
|
||||
f.write(json.dumps(_config) + '\n')
|
||||
|
||||
# save config file
|
||||
_config = {'floatx': floatx(),
|
||||
'epsilon': epsilon(),
|
||||
'backend': _BACKEND,
|
||||
'image_dim_ordering': image_dim_ordering()}
|
||||
with open(_config_path, 'w') as f:
|
||||
f.write(json.dumps(_config, indent=4))
|
||||
|
||||
if 'KERAS_BACKEND' in os.environ:
|
||||
_backend = os.environ['KERAS_BACKEND']
|
||||
assert _backend in {'theano', 'tensorflow'}
|
||||
_BACKEND = _backend
|
||||
|
||||
# import backend
|
||||
if _BACKEND == 'theano':
|
||||
sys.stderr.write('Using Theano backend.\n')
|
||||
from .theano_backend import *
|
||||
@@ -49,3 +61,10 @@ elif _BACKEND == 'tensorflow':
|
||||
from .tensorflow_backend import *
|
||||
else:
|
||||
raise Exception('Unknown backend: ' + str(_BACKEND))
|
||||
|
||||
|
||||
def backend():
|
||||
'''Publicly accessible method
|
||||
for determining the current backend.
|
||||
'''
|
||||
return _BACKEND
|
||||
|
||||
@@ -1,20 +1,33 @@
|
||||
import numpy as np
|
||||
|
||||
from collections import defaultdict
|
||||
|
||||
# the type of float to use throughout the session.
|
||||
_FLOATX = 'float32'
|
||||
_EPSILON = 10e-8
|
||||
_UID_PREFIXES = defaultdict(int)
|
||||
_IMAGE_DIM_ORDERING = 'th'
|
||||
|
||||
|
||||
def epsilon():
|
||||
'''Returns the value of the fuzz
|
||||
factor used in numeric expressions.
|
||||
'''
|
||||
return _EPSILON
|
||||
|
||||
|
||||
def set_epsilon(e):
|
||||
'''Sets the value of the fuzz
|
||||
factor used in numeric expressions.
|
||||
'''
|
||||
global _EPSILON
|
||||
_EPSILON = e
|
||||
|
||||
|
||||
def floatx():
|
||||
'''Returns the default float type, as a string
|
||||
(e.g. 'float16', 'float32', 'float64').
|
||||
'''
|
||||
return _FLOATX
|
||||
|
||||
|
||||
@@ -22,11 +35,44 @@ def set_floatx(floatx):
|
||||
global _FLOATX
|
||||
if floatx not in {'float16', 'float32', 'float64'}:
|
||||
raise Exception('Unknown floatx type: ' + str(floatx))
|
||||
floatx = str(floatx)
|
||||
_FLOATX = floatx
|
||||
_FLOATX = str(floatx)
|
||||
|
||||
|
||||
def cast_to_floatx(x):
|
||||
'''Cast a Numpy array to floatx.
|
||||
'''
|
||||
return np.asarray(x, dtype=_FLOATX)
|
||||
|
||||
|
||||
def image_dim_ordering():
|
||||
'''Returns the image dimension ordering
|
||||
convention ('th' or 'tf').
|
||||
'''
|
||||
return _IMAGE_DIM_ORDERING
|
||||
|
||||
|
||||
def set_image_dim_ordering(dim_ordering):
|
||||
'''Sets the value of the image dimension
|
||||
ordering convention ('th' or 'tf').
|
||||
'''
|
||||
global _IMAGE_DIM_ORDERING
|
||||
if dim_ordering not in {'tf', 'th'}:
|
||||
raise Exception('Unknown dim_ordering:', dim_ordering)
|
||||
_IMAGE_DIM_ORDERING = str(dim_ordering)
|
||||
|
||||
|
||||
def get_uid(prefix=''):
|
||||
_UID_PREFIXES[prefix] += 1
|
||||
return _UID_PREFIXES[prefix]
|
||||
|
||||
|
||||
def reset_uids():
|
||||
global _UID_PREFIXES
|
||||
_UID_PREFIXES = defaultdict(int)
|
||||
|
||||
|
||||
def is_keras_tensor(x):
|
||||
if hasattr(x, '_keras_shape'):
|
||||
return True
|
||||
else:
|
||||
return False
|
||||
|
||||
Diferenças do arquivo suprimidas por serem muito extensas
Carregar Diff
@@ -3,13 +3,32 @@ from theano import tensor as T
|
||||
from theano.sandbox.rng_mrg import MRG_RandomStreams as RandomStreams
|
||||
from theano.tensor.signal import pool
|
||||
from theano.tensor.nnet import conv3d2d
|
||||
from theano.printing import Print
|
||||
try:
|
||||
from theano.tensor.nnet.nnet import softsign as T_softsign
|
||||
except ImportError:
|
||||
from theano.sandbox.softsign import softsign as T_softsign
|
||||
import inspect
|
||||
import numpy as np
|
||||
from .common import _FLOATX, _EPSILON
|
||||
from .common import _FLOATX, _EPSILON, _IMAGE_DIM_ORDERING
|
||||
|
||||
|
||||
# INTERNAL UTILS
|
||||
theano.config.floatX = _FLOATX
|
||||
_LEARNING_PHASE = T.scalar(dtype='uint8', name='keras_learning_phase') # 0 = test, 1 = train
|
||||
|
||||
|
||||
def learning_phase():
|
||||
# False = test, True = train
|
||||
return _LEARNING_PHASE
|
||||
|
||||
|
||||
def set_learning_phase(value):
|
||||
global _LEARNING_PHASE
|
||||
if value not in {0, 1}:
|
||||
raise ValueError('Expected learning phase to be '
|
||||
'0 or 1.')
|
||||
_LEARNING_PHASE = value
|
||||
|
||||
|
||||
# VARIABLE MANIPULATION
|
||||
@@ -28,9 +47,14 @@ def placeholder(shape=None, ndim=None, dtype=_FLOATX, name=None):
|
||||
raise Exception('Specify either a shape or ndim value.')
|
||||
if shape is not None:
|
||||
ndim = len(shape)
|
||||
else:
|
||||
shape = tuple([None for _ in range(ndim)])
|
||||
|
||||
broadcast = (False,) * ndim
|
||||
return T.TensorType(dtype, broadcast)(name)
|
||||
x = T.TensorType(dtype, broadcast)(name)
|
||||
x._keras_shape = shape
|
||||
x._uses_learning_phase = False
|
||||
return x
|
||||
|
||||
|
||||
def shape(x):
|
||||
@@ -46,6 +70,10 @@ def ndim(x):
|
||||
return x.ndim
|
||||
|
||||
|
||||
def dtype(x):
|
||||
return x.dtype
|
||||
|
||||
|
||||
def eval(x):
|
||||
'''Run a graph.
|
||||
'''
|
||||
@@ -64,6 +92,12 @@ def ones(shape, dtype=_FLOATX, name=None):
|
||||
return variable(np.ones(shape), dtype, name)
|
||||
|
||||
|
||||
def eye(size, dtype=_FLOATX, name=None):
|
||||
'''Instantiate an identity matrix.
|
||||
'''
|
||||
return variable(np.eye(size), dtype, name)
|
||||
|
||||
|
||||
def ones_like(x):
|
||||
return T.ones_like(x)
|
||||
|
||||
@@ -72,6 +106,16 @@ def zeros_like(x):
|
||||
return T.zeros_like(x)
|
||||
|
||||
|
||||
def random_uniform_variable(shape, low, high, dtype=_FLOATX, name=None):
|
||||
return variable(np.random.uniform(low=low, high=high, size=shape),
|
||||
dtype=dtype, name=name)
|
||||
|
||||
|
||||
def random_normal_variable(shape, mean, scale, dtype=_FLOATX, name=None):
|
||||
return variable(np.random.normal(loc=0.0, scale=scale, size=shape),
|
||||
dtype=dtype, name=name)
|
||||
|
||||
|
||||
def count_params(x):
|
||||
'''Return number of scalars in a tensor.
|
||||
|
||||
@@ -84,6 +128,25 @@ def cast(x, dtype):
|
||||
return T.cast(x, dtype)
|
||||
|
||||
|
||||
# UPDATES OPS
|
||||
|
||||
|
||||
def update(x, new_x):
|
||||
return (x, new_x)
|
||||
|
||||
|
||||
def update_add(x, increment):
|
||||
return (x, x + increment)
|
||||
|
||||
|
||||
def update_sub(x, decrement):
|
||||
return (x, x - decrement)
|
||||
|
||||
|
||||
def moving_average_update(variable, value, momentum):
|
||||
return (variable, variable * momentum + value * (1. - momentum))
|
||||
|
||||
|
||||
# LINEAR ALGEBRA
|
||||
|
||||
'''
|
||||
@@ -97,10 +160,52 @@ def dot(x, y):
|
||||
|
||||
|
||||
def batch_dot(x, y, axes=None):
|
||||
'''Batchwise dot product.
|
||||
|
||||
batch_dot results in a tensor with less dimensions than the input.
|
||||
If the number of dimensions is reduced to 1, we use `expand_dims` to
|
||||
make sure that ndim is at least 2.
|
||||
|
||||
# Arguments
|
||||
x, y: tensors with ndim >= 2
|
||||
axes: list (or single) int with target dimensions
|
||||
|
||||
# Returns
|
||||
A tensor with shape equal to the concatenation of x's shape
|
||||
(less the dimension that was summed over) and y's shape
|
||||
(less the batch dimension and the dimension that was summed over).
|
||||
If the final rank is 1, we reshape it to (batch_size, 1).
|
||||
|
||||
# Examples
|
||||
Assume x = [[1, 2], [3, 4]] and y = [[5, 6], [7, 8]]
|
||||
batch_dot(x, y, axes=1) = [[17, 53]] which is the main diagonal
|
||||
of x.dot(y.T), although we never have to calculate the off-diagonal
|
||||
elements.
|
||||
|
||||
Shape inference:
|
||||
Let x's shape be (100, 20) and y's shape be (100, 30, 20).
|
||||
If dot_axes is (1, 2), to find the output shape of resultant tensor,
|
||||
loop through each dimension in x's shape and y's shape:
|
||||
x.shape[0] : 100 : append to output shape
|
||||
x.shape[1] : 20 : do not append to output shape,
|
||||
dimension 1 of x has been summed over. (dot_axes[0] = 1)
|
||||
y.shape[0] : 100 : do not append to output shape,
|
||||
always ignore first dimension of y
|
||||
y.shape[1] : 30 : append to output shape
|
||||
y.shape[2] : 20 : do not append to output shape,
|
||||
dimension 2 of y has been summed over. (dot_axes[1] = 2)
|
||||
|
||||
output_shape = (100, 30)
|
||||
'''
|
||||
if type(axes) == int:
|
||||
axes = (axes, axes)
|
||||
if axes is None:
|
||||
# behaves like tf.batch_matmul as default
|
||||
axes = [(x.ndim-1,), (y.ndim-2,)]
|
||||
return T.batched_tensordot(x, y, axes=axes)
|
||||
axes = [x.ndim - 1, y.ndim - 2]
|
||||
out = T.batched_tensordot(x, y, axes=axes)
|
||||
if ndim(out) == 1:
|
||||
out = expand_dims(out, 1)
|
||||
return out
|
||||
|
||||
|
||||
def transpose(x):
|
||||
@@ -150,12 +255,22 @@ def std(x, axis=None, keepdims=False):
|
||||
return T.std(x, axis=axis, keepdims=keepdims)
|
||||
|
||||
|
||||
def var(x, axis=None, keepdims=False):
|
||||
return T.var(x, axis=axis, keepdims=keepdims)
|
||||
|
||||
|
||||
def any(x, axis=None, keepdims=False):
|
||||
'''Bitwise reduction (logical OR).
|
||||
'''
|
||||
return T.any(x, axis=axis, keepdims=keepdims)
|
||||
|
||||
|
||||
def all(x, axis=None, keepdims=False):
|
||||
'''Bitwise reduction (logical AND).
|
||||
'''
|
||||
return T.all(x, axis=axis, keepdims=keepdims)
|
||||
|
||||
|
||||
def argmax(x, axis=-1):
|
||||
return T.argmax(x, axis=axis, keepdims=False)
|
||||
|
||||
@@ -211,6 +326,22 @@ def not_equal(x, y):
|
||||
return T.neq(x, y)
|
||||
|
||||
|
||||
def greater(x, y):
|
||||
return T.gt(x, y)
|
||||
|
||||
|
||||
def greater_equal(x, y):
|
||||
return T.ge(x, y)
|
||||
|
||||
|
||||
def lesser(x, y):
|
||||
return T.lt(x, y)
|
||||
|
||||
|
||||
def lesser_equal(x, y):
|
||||
return T.le(x, y)
|
||||
|
||||
|
||||
def maximum(x, y):
|
||||
return T.maximum(x, y)
|
||||
|
||||
@@ -219,6 +350,48 @@ def minimum(x, y):
|
||||
return T.minimum(x, y)
|
||||
|
||||
|
||||
def sin(x):
|
||||
return T.sin(x)
|
||||
|
||||
|
||||
def cos(x):
|
||||
return T.cos(x)
|
||||
|
||||
|
||||
def normalize_batch_in_training(x, gamma, beta,
|
||||
reduction_axes, epsilon=0.0001):
|
||||
'''Compute mean and std for batch then apply batch_normalization on batch.
|
||||
'''
|
||||
var = x.var(reduction_axes)
|
||||
mean = x.mean(reduction_axes)
|
||||
|
||||
target_shape = []
|
||||
for axis in range(ndim(x)):
|
||||
if axis in reduction_axes:
|
||||
target_shape.append(1)
|
||||
else:
|
||||
target_shape.append(x.shape[axis])
|
||||
target_shape = T.stack(*target_shape)
|
||||
|
||||
broadcast_mean = T.reshape(mean, target_shape)
|
||||
broadcast_var = T.reshape(var, target_shape)
|
||||
broadcast_beta = T.reshape(beta, target_shape)
|
||||
broadcast_gamma = T.reshape(gamma, target_shape)
|
||||
normed = batch_normalization(x, broadcast_mean, broadcast_var,
|
||||
broadcast_beta, broadcast_gamma,
|
||||
epsilon)
|
||||
return normed, mean, var
|
||||
|
||||
|
||||
def batch_normalization(x, mean, var, beta, gamma, epsilon=0.0001):
|
||||
'''Apply batch normalization on x given mean, var, beta and gamma.
|
||||
'''
|
||||
normed = T.nnet.bn.batch_normalization(x, gamma, beta, mean,
|
||||
sqrt(var) + epsilon,
|
||||
mode='high_mem')
|
||||
return normed
|
||||
|
||||
|
||||
# SHAPE OPERATIONS
|
||||
|
||||
def concatenate(tensors, axis=-1):
|
||||
@@ -331,15 +504,18 @@ def expand_dims(x, dim=-1):
|
||||
def squeeze(x, axis):
|
||||
'''Remove a 1-dimension from the tensor at index "axis".
|
||||
'''
|
||||
x = T.addbroadcast(x, axis)
|
||||
return T.squeeze(x)
|
||||
broadcastable = x.broadcastable[:axis] + x.broadcastable[axis+1:]
|
||||
x = T.patternbroadcast(x, [i == axis for i in range(x.type.ndim)])
|
||||
x = T.squeeze(x)
|
||||
x = T.patternbroadcast(x, broadcastable)
|
||||
return x
|
||||
|
||||
|
||||
def temporal_padding(x, padding=1):
|
||||
'''Pad the middle dimension of a 3D tensor
|
||||
with "padding" zeros left and right.
|
||||
|
||||
Appologies for the inane API, but Theano makes this
|
||||
Apologies for the inane API, but Theano makes this
|
||||
really hard.
|
||||
'''
|
||||
input_shape = x.shape
|
||||
@@ -419,6 +595,19 @@ def spatial_3d_padding(x, padding=(1, 1, 1), dim_ordering='th'):
|
||||
def pack(x):
|
||||
return T.stack(*x)
|
||||
|
||||
|
||||
def one_hot(indices, nb_classes):
|
||||
'''
|
||||
Input: nD integer tensor of shape (batch_size, dim1, dim2, ... dim(n-1))
|
||||
Output: (n + 1)D one hot representation of the input with shape (batch_size, dim1, dim2, ... dim(n-1), nb_classes)
|
||||
'''
|
||||
input_shape = tuple((indices.shape[i] for i in range(indices.ndim)))
|
||||
indices = T.flatten(indices)
|
||||
oh = T.extra_ops.to_one_hot(indices, nb_classes)
|
||||
oh = T.reshape(oh, input_shape + (nb_classes,))
|
||||
return oh
|
||||
|
||||
|
||||
# VALUE MANIPULATION
|
||||
|
||||
|
||||
@@ -429,17 +618,39 @@ def get_value(x):
|
||||
return x.get_value()
|
||||
|
||||
|
||||
def batch_get_value(xs):
|
||||
'''Returns the value of more than one tensor variable,
|
||||
as a list of Numpy arrays.
|
||||
'''
|
||||
return [get_value(x) for x in xs]
|
||||
|
||||
|
||||
def set_value(x, value):
|
||||
x.set_value(np.asarray(value, dtype=x.dtype))
|
||||
|
||||
|
||||
def batch_set_value(tuples):
|
||||
for x, value in tuples:
|
||||
x.set_value(np.asarray(value, dtype=x.dtype))
|
||||
|
||||
|
||||
def print_tensor(x, message=''):
|
||||
'''Print the message and the tensor when evaluated and return the same
|
||||
tensor.
|
||||
'''
|
||||
p_op = Print(message)
|
||||
return p_op(x)
|
||||
|
||||
|
||||
# GRAPH MANIPULATION
|
||||
|
||||
class Function(object):
|
||||
|
||||
def __init__(self, inputs, outputs, updates=[], **kwargs):
|
||||
self.function = theano.function(inputs, outputs, updates=updates,
|
||||
allow_input_downcast=True, **kwargs)
|
||||
allow_input_downcast=True,
|
||||
on_unused_input='ignore',
|
||||
**kwargs)
|
||||
|
||||
def __call__(self, inputs):
|
||||
assert type(inputs) in {list, tuple}
|
||||
@@ -460,10 +671,18 @@ def gradients(loss, variables):
|
||||
return T.grad(loss, variables)
|
||||
|
||||
|
||||
def stop_gradient(variables):
|
||||
'''Returns `variables` but with zero gradient with respect to every other
|
||||
variables.
|
||||
'''
|
||||
return theano.gradient.disconnected_grad(variables)
|
||||
|
||||
|
||||
# CONTROL FLOW
|
||||
|
||||
def rnn(step_function, inputs, initial_states,
|
||||
go_backwards=False, mask=None, constants=None):
|
||||
go_backwards=False, mask=None, constants=None,
|
||||
unroll=False, input_length=None):
|
||||
'''Iterates over the time dimension of a tensor.
|
||||
|
||||
# Arguments
|
||||
@@ -487,7 +706,8 @@ def rnn(step_function, inputs, initial_states,
|
||||
mask: binary tensor with shape (samples, time),
|
||||
with a zero for every element that is masked.
|
||||
constants: a list of constant values passed at each step.
|
||||
|
||||
unroll: whether to unroll the RNN or to use a symbolic loop (`scan`).
|
||||
input_length: must be specified if using `unroll`.
|
||||
|
||||
# Returns
|
||||
A tuple (last_output, outputs, new_states).
|
||||
@@ -501,56 +721,118 @@ def rnn(step_function, inputs, initial_states,
|
||||
ndim = inputs.ndim
|
||||
assert ndim >= 3, 'Input should be at least 3D.'
|
||||
|
||||
if unroll:
|
||||
if input_length is None:
|
||||
raise Exception('When specifying `unroll=True`, an `input_length` '
|
||||
'must be provided to `rnn`.')
|
||||
|
||||
axes = [1, 0] + list(range(2, ndim))
|
||||
inputs = inputs.dimshuffle(axes)
|
||||
|
||||
if constants is None:
|
||||
constants = []
|
||||
|
||||
if mask is not None:
|
||||
if mask.ndim == ndim-1:
|
||||
mask = expand_dims(mask)
|
||||
assert mask.ndim == ndim
|
||||
mask = mask.dimshuffle(axes)
|
||||
|
||||
if constants is None:
|
||||
constants = []
|
||||
# build an all-zero tensor of shape (samples, output_dim)
|
||||
initial_output = step_function(inputs[0], initial_states + constants)[0] * 0
|
||||
# Theano gets confused by broadcasting patterns in the scan op
|
||||
initial_output = T.unbroadcast(initial_output, 0, 1)
|
||||
if unroll:
|
||||
indices = list(range(input_length))
|
||||
if go_backwards:
|
||||
indices = indices[::-1]
|
||||
|
||||
def _step(input, mask, output_tm1, *states):
|
||||
output, new_states = step_function(input, states)
|
||||
# output previous output if masked.
|
||||
output = T.switch(mask, output, output_tm1)
|
||||
return_states = []
|
||||
for state, new_state in zip(states, new_states):
|
||||
return_states.append(T.switch(mask, new_state, state))
|
||||
return [output] + return_states
|
||||
successive_outputs = []
|
||||
successive_states = []
|
||||
states = initial_states
|
||||
for i in indices:
|
||||
output, new_states = step_function(inputs[i], states + constants)
|
||||
|
||||
results, _ = theano.scan(
|
||||
_step,
|
||||
sequences=[inputs, mask],
|
||||
outputs_info=[initial_output] + initial_states,
|
||||
non_sequences=constants,
|
||||
go_backwards=go_backwards)
|
||||
if len(successive_outputs) == 0:
|
||||
prev_output = zeros_like(output)
|
||||
else:
|
||||
prev_output = successive_outputs[-1]
|
||||
|
||||
output = T.switch(mask[i], output, prev_output)
|
||||
kept_states = []
|
||||
for state, new_state in zip(states, new_states):
|
||||
kept_states.append(T.switch(mask[i], new_state, state))
|
||||
states = kept_states
|
||||
|
||||
successive_outputs.append(output)
|
||||
successive_states.append(states)
|
||||
|
||||
outputs = T.stack(*successive_outputs)
|
||||
states = []
|
||||
for i in range(len(successive_states[-1])):
|
||||
states.append(T.stack(*[states_at_step[i] for states_at_step in successive_states]))
|
||||
else:
|
||||
# build an all-zero tensor of shape (samples, output_dim)
|
||||
initial_output = step_function(inputs[0], initial_states + constants)[0] * 0
|
||||
# Theano gets confused by broadcasting patterns in the scan op
|
||||
initial_output = T.unbroadcast(initial_output, 0, 1)
|
||||
|
||||
def _step(input, mask, output_tm1, *states):
|
||||
output, new_states = step_function(input, states)
|
||||
# output previous output if masked.
|
||||
output = T.switch(mask, output, output_tm1)
|
||||
return_states = []
|
||||
for state, new_state in zip(states, new_states):
|
||||
return_states.append(T.switch(mask, new_state, state))
|
||||
return [output] + return_states
|
||||
|
||||
results, _ = theano.scan(
|
||||
_step,
|
||||
sequences=[inputs, mask],
|
||||
outputs_info=[initial_output] + initial_states,
|
||||
non_sequences=constants,
|
||||
go_backwards=go_backwards)
|
||||
|
||||
# deal with Theano API inconsistency
|
||||
if type(results) is list:
|
||||
outputs = results[0]
|
||||
states = results[1:]
|
||||
else:
|
||||
outputs = results
|
||||
states = []
|
||||
else:
|
||||
def _step(input, *states):
|
||||
output, new_states = step_function(input, states)
|
||||
return [output] + new_states
|
||||
if unroll:
|
||||
indices = list(range(input_length))
|
||||
if go_backwards:
|
||||
indices = indices[::-1]
|
||||
|
||||
results, _ = theano.scan(
|
||||
_step,
|
||||
sequences=inputs,
|
||||
outputs_info=[None] + initial_states,
|
||||
non_sequences=constants,
|
||||
go_backwards=go_backwards)
|
||||
successive_outputs = []
|
||||
successive_states = []
|
||||
states = initial_states
|
||||
for i in indices:
|
||||
output, states = step_function(inputs[i], states + constants)
|
||||
successive_outputs.append(output)
|
||||
successive_states.append(states)
|
||||
outputs = T.stack(*successive_outputs)
|
||||
states = []
|
||||
for i in range(len(successive_states[-1])):
|
||||
states.append(T.stack(*[states_at_step[i] for states_at_step in successive_states]))
|
||||
|
||||
# deal with Theano API inconsistency
|
||||
if type(results) is list:
|
||||
outputs = results[0]
|
||||
states = results[1:]
|
||||
else:
|
||||
outputs = results
|
||||
states = []
|
||||
else:
|
||||
def _step(input, *states):
|
||||
output, new_states = step_function(input, states)
|
||||
return [output] + new_states
|
||||
|
||||
results, _ = theano.scan(
|
||||
_step,
|
||||
sequences=inputs,
|
||||
outputs_info=[None] + initial_states,
|
||||
non_sequences=constants,
|
||||
go_backwards=go_backwards)
|
||||
|
||||
# deal with Theano API inconsistency
|
||||
if type(results) is list:
|
||||
outputs = results[0]
|
||||
states = results[1:]
|
||||
else:
|
||||
outputs = results
|
||||
states = []
|
||||
|
||||
outputs = T.squeeze(outputs)
|
||||
last_output = outputs[-1]
|
||||
@@ -567,6 +849,26 @@ def switch(condition, then_expression, else_expression):
|
||||
return T.switch(condition, then_expression, else_expression)
|
||||
|
||||
|
||||
def in_train_phase(x, alt):
|
||||
if _LEARNING_PHASE is 1:
|
||||
return x
|
||||
elif _LEARNING_PHASE is 0:
|
||||
return alt
|
||||
x = T.switch(_LEARNING_PHASE, x, alt)
|
||||
x._uses_learning_phase = True
|
||||
return x
|
||||
|
||||
|
||||
def in_test_phase(x, alt):
|
||||
if _LEARNING_PHASE is 1:
|
||||
return alt
|
||||
elif _LEARNING_PHASE is 0:
|
||||
return x
|
||||
x = T.switch(_LEARNING_PHASE, alt, x)
|
||||
x._uses_learning_phase = True
|
||||
return x
|
||||
|
||||
|
||||
# NN OPERATIONS
|
||||
|
||||
def relu(x, alpha=0., max_value=None):
|
||||
@@ -588,6 +890,10 @@ def softplus(x):
|
||||
return T.nnet.softplus(x)
|
||||
|
||||
|
||||
def softsign(x):
|
||||
return T_softsign(x)
|
||||
|
||||
|
||||
def categorical_crossentropy(output, target, from_logits=False):
|
||||
if from_logits:
|
||||
output = T.nnet.softmax(output)
|
||||
@@ -599,6 +905,13 @@ def categorical_crossentropy(output, target, from_logits=False):
|
||||
return T.nnet.categorical_crossentropy(output, target)
|
||||
|
||||
|
||||
def sparse_categorical_crossentropy(output, target, from_logits=False):
|
||||
target = T.cast(T.flatten(target), 'int32')
|
||||
target = T.extra_ops.to_one_hot(target, nb_class=output.shape[-1])
|
||||
target = reshape(target, shape(output))
|
||||
return categorical_crossentropy(output, target, from_logits)
|
||||
|
||||
|
||||
def binary_crossentropy(output, target, from_logits=False):
|
||||
if from_logits:
|
||||
output = T.nnet.sigmoid(output)
|
||||
@@ -623,7 +936,7 @@ def dropout(x, level, seed=None):
|
||||
if level < 0. or level >= 1:
|
||||
raise Exception('Dropout level must be in interval [0, 1[.')
|
||||
if seed is None:
|
||||
seed = np.random.randint(10e6)
|
||||
seed = np.random.randint(1, 10e6)
|
||||
rng = RandomStreams(seed=seed)
|
||||
retain_prob = 1. - level
|
||||
x *= rng.binomial(x.shape, p=retain_prob, dtype=x.dtype)
|
||||
@@ -638,70 +951,172 @@ def l2_normalize(x, axis):
|
||||
|
||||
# CONVOLUTIONS
|
||||
|
||||
def conv2d(x, kernel, strides=(1, 1), border_mode='valid', dim_ordering='th',
|
||||
image_shape=None, filter_shape=None):
|
||||
'''
|
||||
border_mode: string, "same" or "valid".
|
||||
'''
|
||||
if dim_ordering not in {'th', 'tf'}:
|
||||
raise Exception('Unknown dim_ordering ' + str(dim_ordering))
|
||||
|
||||
def _preprocess_conv2d_input(x, dim_ordering):
|
||||
if dim_ordering == 'tf':
|
||||
# TF uses the last dimension as channel dimension,
|
||||
# instead of the 2nd one.
|
||||
# TH input shape: (samples, input_depth, rows, cols)
|
||||
# TF input shape: (samples, rows, cols, input_depth)
|
||||
x = x.dimshuffle((0, 3, 1, 2))
|
||||
return x
|
||||
|
||||
|
||||
def _preprocess_conv2d_kernel(kernel, dim_ordering):
|
||||
if dim_ordering == 'tf':
|
||||
# TF uses the last dimension as channel dimension,
|
||||
# instead of the 2nd one.
|
||||
# TH kernel shape: (depth, input_depth, rows, cols)
|
||||
# TF kernel shape: (rows, cols, input_depth, depth)
|
||||
x = x.dimshuffle((0, 3, 1, 2))
|
||||
kernel = kernel.dimshuffle((3, 2, 0, 1))
|
||||
if image_shape:
|
||||
image_shape = (image_shape[0], image_shape[3],
|
||||
image_shape[1], image_shape[2])
|
||||
if filter_shape:
|
||||
filter_shape = (filter_shape[3], filter_shape[2],
|
||||
filter_shape[0], filter_shape[1])
|
||||
return kernel
|
||||
|
||||
|
||||
def _preprocess_border_mode(border_mode):
|
||||
if border_mode == 'same':
|
||||
th_border_mode = 'half'
|
||||
np_kernel = kernel.eval()
|
||||
assert strides[0] <= np_kernel.shape[2], 'strides should be smaller than the convolution window.'
|
||||
assert strides[1] <= np_kernel.shape[3], 'strides should be smaller than the convolution window.'
|
||||
elif border_mode == 'valid':
|
||||
th_border_mode = 'valid'
|
||||
else:
|
||||
raise Exception('Border mode not supported: ' + str(border_mode))
|
||||
return th_border_mode
|
||||
|
||||
# Theano might not accept like longs
|
||||
|
||||
def _preprocess_image_shape(dim_ordering, image_shape):
|
||||
# Theano might not accept long type
|
||||
def int_or_none(value):
|
||||
try:
|
||||
return int(value)
|
||||
except TypeError:
|
||||
return None
|
||||
|
||||
if dim_ordering == 'tf':
|
||||
if image_shape:
|
||||
image_shape = (image_shape[0], image_shape[3],
|
||||
image_shape[1], image_shape[2])
|
||||
if image_shape is not None:
|
||||
image_shape = tuple(int_or_none(v) for v in image_shape)
|
||||
return image_shape
|
||||
|
||||
|
||||
def _preprocess_filter_shape(dim_ordering, filter_shape):
|
||||
# Theano might not accept long type
|
||||
def int_or_none(value):
|
||||
try:
|
||||
return int(value)
|
||||
except TypeError:
|
||||
return None
|
||||
if dim_ordering == 'tf':
|
||||
if filter_shape:
|
||||
filter_shape = (filter_shape[3], filter_shape[2],
|
||||
filter_shape[0], filter_shape[1])
|
||||
if filter_shape is not None:
|
||||
filter_shape = tuple(int_or_none(v) for v in filter_shape)
|
||||
return filter_shape
|
||||
|
||||
conv_out = T.nnet.conv2d(x, kernel,
|
||||
border_mode=th_border_mode,
|
||||
subsample=strides,
|
||||
input_shape=image_shape,
|
||||
filter_shape=filter_shape)
|
||||
|
||||
def _postprocess_conv2d_output(conv_out, x, border_mode, np_kernel, strides, dim_ordering):
|
||||
if border_mode == 'same':
|
||||
if np_kernel.shape[2] % 2 == 0:
|
||||
conv_out = conv_out[:,:,:(x.shape[2]+strides[0]-1) // strides[0],:]
|
||||
conv_out = conv_out[:, :, :(x.shape[2] + strides[0] - 1) // strides[0], :]
|
||||
if np_kernel.shape[3] % 2 == 0:
|
||||
conv_out = conv_out[:,:,:,:(x.shape[3]+strides[1]-1) // strides[1]]
|
||||
|
||||
conv_out = conv_out[:, :, :, :(x.shape[3] + strides[1] - 1) // strides[1]]
|
||||
if dim_ordering == 'tf':
|
||||
conv_out = conv_out.dimshuffle((0, 2, 3, 1))
|
||||
return conv_out
|
||||
|
||||
|
||||
def conv2d(x, kernel, strides=(1, 1), border_mode='valid',
|
||||
dim_ordering=_IMAGE_DIM_ORDERING, image_shape=None,
|
||||
filter_shape=None, filter_dilation=(1, 1)):
|
||||
'''2D convolution.
|
||||
|
||||
# Arguments
|
||||
kernel: kernel tensor.
|
||||
strides: strides tuple.
|
||||
border_mode: string, "same" or "valid".
|
||||
dim_ordering: "tf" or "th".
|
||||
Whether to use Theano or TensorFlow dimension ordering
|
||||
in inputs/kernels/ouputs.
|
||||
'''
|
||||
if dim_ordering not in {'th', 'tf'}:
|
||||
raise Exception('Unknown dim_ordering ' + str(dim_ordering))
|
||||
|
||||
x = _preprocess_conv2d_input(x, dim_ordering)
|
||||
kernel = _preprocess_conv2d_kernel(kernel, dim_ordering)
|
||||
th_border_mode = _preprocess_border_mode(border_mode)
|
||||
np_kernel = kernel.eval()
|
||||
image_shape = _preprocess_image_shape(dim_ordering, image_shape)
|
||||
filter_shape = _preprocess_filter_shape(dim_ordering, filter_shape)
|
||||
|
||||
# TODO: remove the if statement when theano with no filter dilation is deprecated.
|
||||
if filter_dilation == (1, 1):
|
||||
conv_out = T.nnet.conv2d(x, kernel,
|
||||
border_mode=th_border_mode,
|
||||
subsample=strides,
|
||||
input_shape=image_shape,
|
||||
filter_shape=filter_shape)
|
||||
else:
|
||||
conv_out = T.nnet.conv2d(x, kernel,
|
||||
border_mode=th_border_mode,
|
||||
subsample=strides,
|
||||
input_shape=image_shape,
|
||||
filter_shape=filter_shape,
|
||||
filter_dilation=filter_dilation)
|
||||
|
||||
conv_out = _postprocess_conv2d_output(conv_out, x, border_mode, np_kernel,
|
||||
strides, dim_ordering)
|
||||
return conv_out
|
||||
|
||||
|
||||
def deconv2d(x, kernel, output_shape, strides=(1, 1),
|
||||
border_mode='valid',
|
||||
dim_ordering=_IMAGE_DIM_ORDERING,
|
||||
image_shape=None, filter_shape=None):
|
||||
'''2D deconvolution (transposed convolution).
|
||||
|
||||
# Arguments
|
||||
kernel: kernel tensor.
|
||||
output_shape: desired dimensions of output.
|
||||
strides: strides tuple.
|
||||
border_mode: string, "same" or "valid".
|
||||
dim_ordering: "tf" or "th".
|
||||
Whether to use Theano or TensorFlow dimension ordering
|
||||
in inputs/kernels/ouputs.
|
||||
'''
|
||||
flip_filters = False
|
||||
if dim_ordering not in {'th', 'tf'}:
|
||||
raise Exception('Unknown dim_ordering ' + str(dim_ordering))
|
||||
|
||||
x = _preprocess_conv2d_input(x, dim_ordering)
|
||||
kernel = _preprocess_conv2d_kernel(kernel, dim_ordering)
|
||||
kernel = kernel.dimshuffle((1, 0, 2, 3))
|
||||
th_border_mode = _preprocess_border_mode(border_mode)
|
||||
np_kernel = kernel.eval()
|
||||
filter_shape = _preprocess_filter_shape(dim_ordering, filter_shape)
|
||||
|
||||
op = T.nnet.abstract_conv.AbstractConv2d_gradInputs(imshp=output_shape,
|
||||
kshp=filter_shape,
|
||||
subsample=strides,
|
||||
border_mode=th_border_mode,
|
||||
filter_flip=not flip_filters)
|
||||
conv_out = op(kernel, x, output_shape[2:])
|
||||
|
||||
conv_out = _postprocess_conv2d_output(conv_out, x, border_mode, np_kernel,
|
||||
strides, dim_ordering)
|
||||
return conv_out
|
||||
|
||||
|
||||
def atrous_conv2d(x, kernel, rate=1,
|
||||
border_mode='valid',
|
||||
dim_ordering=_IMAGE_DIM_ORDERING,
|
||||
image_shape=None, filter_shape=None):
|
||||
raise NotImplementedError
|
||||
|
||||
|
||||
def separable_conv2d(x, depthwise_kernel, pointwise_kernel, strides=(1, 1),
|
||||
border_mode='valid', dim_ordering=_IMAGE_DIM_ORDERING):
|
||||
raise NotImplementedError
|
||||
|
||||
|
||||
def conv3d(x, kernel, strides=(1, 1, 1),
|
||||
border_mode='valid', dim_ordering='th',
|
||||
volume_shape=None, filter_shape=None):
|
||||
@@ -870,27 +1285,20 @@ def pool3d(x, pool_size, strides=(1, 1, 1), border_mode='valid',
|
||||
|
||||
def random_normal(shape, mean=0.0, std=1.0, dtype=_FLOATX, seed=None):
|
||||
if seed is None:
|
||||
seed = np.random.randint(10e6)
|
||||
seed = np.random.randint(1, 10e6)
|
||||
rng = RandomStreams(seed=seed)
|
||||
return rng.normal(size=shape, avg=mean, std=std, dtype=dtype)
|
||||
|
||||
|
||||
def random_uniform(shape, low=0.0, high=1.0, dtype=_FLOATX, seed=None):
|
||||
if seed is None:
|
||||
seed = np.random.randint(10e6)
|
||||
seed = np.random.randint(1, 10e6)
|
||||
rng = RandomStreams(seed=seed)
|
||||
return rng.uniform(shape, low=low, high=high, dtype=dtype)
|
||||
|
||||
|
||||
def random_binomial(shape, p=0.0, dtype=_FLOATX, seed=None):
|
||||
if seed is None:
|
||||
seed = np.random.randint(10e6)
|
||||
seed = np.random.randint(1, 10e6)
|
||||
rng = RandomStreams(seed=seed)
|
||||
return rng.binomial(shape, p=p, dtype=dtype)
|
||||
|
||||
'''
|
||||
more TODO:
|
||||
|
||||
tensordot -> soon to be introduced in TF
|
||||
batched_tensordot -> reimplement
|
||||
'''
|
||||
|
||||
+76
-55
@@ -9,6 +9,7 @@ import warnings
|
||||
from collections import deque
|
||||
from .utils.generic_utils import Progbar
|
||||
from keras import backend as K
|
||||
from pkg_resources import parse_version
|
||||
|
||||
|
||||
class CallbackList(object):
|
||||
@@ -60,8 +61,7 @@ class CallbackList(object):
|
||||
callback.on_batch_end(batch, logs)
|
||||
self._delta_ts_batch_end.append(time.time() - t_before_callbacks)
|
||||
delta_t_median = np.median(self._delta_ts_batch_end)
|
||||
if self._delta_t_batch > 0. and delta_t_median > 0.95 * \
|
||||
self._delta_t_batch and delta_t_median > 0.1:
|
||||
if self._delta_t_batch > 0. and (delta_t_median > 0.95 * self._delta_t_batch and delta_t_median > 0.1):
|
||||
warnings.warn('Method on_batch_end() is slow compared '
|
||||
'to the batch update (%f). Check your callbacks.'
|
||||
% delta_t_median)
|
||||
@@ -193,7 +193,7 @@ class ProgbarLogger(Callback):
|
||||
if k in logs:
|
||||
self.log_values.append((k, logs[k]))
|
||||
if self.verbose:
|
||||
self.progbar.update(self.seen, self.log_values)
|
||||
self.progbar.update(self.seen, self.log_values, force=True)
|
||||
|
||||
|
||||
class History(Callback):
|
||||
@@ -211,9 +211,7 @@ class History(Callback):
|
||||
def on_epoch_end(self, epoch, logs={}):
|
||||
self.epoch.append(epoch)
|
||||
for k, v in logs.items():
|
||||
if k not in self.history:
|
||||
self.history[k] = []
|
||||
self.history[k].append(v)
|
||||
self.history.setdefault(k, []).append(v)
|
||||
|
||||
|
||||
class ModelCheckpoint(Callback):
|
||||
@@ -233,25 +231,29 @@ class ModelCheckpoint(Callback):
|
||||
verbose: verbosity mode, 0 or 1.
|
||||
save_best_only: if `save_best_only=True`,
|
||||
the latest best model according to
|
||||
the validation loss will not be overwritten.
|
||||
the quantity monitored will not be overwritten.
|
||||
mode: one of {auto, min, max}.
|
||||
If `save_best_only=True`, the decision
|
||||
to overwrite the current save file is made
|
||||
based on either the maximization or the
|
||||
minization of the monitored. For `val_acc`,
|
||||
minimization of the monitored quantity. For `val_acc`,
|
||||
this should be `max`, for `val_loss` this should
|
||||
be `min`, etc. In `auto` mode, the direction is
|
||||
automatically inferred from the name of the monitored quantity.
|
||||
save_weights_only: if True, then only the model's weights will be
|
||||
saved (`model.save_weights(filepath)`), else the full model
|
||||
is saved (`model.save(filepath)`).
|
||||
|
||||
'''
|
||||
def __init__(self, filepath, monitor='val_loss', verbose=0,
|
||||
save_best_only=False, mode='auto'):
|
||||
|
||||
super(Callback, self).__init__()
|
||||
save_best_only=False, save_weights_only=False,
|
||||
mode='auto'):
|
||||
super(ModelCheckpoint, self).__init__()
|
||||
self.monitor = monitor
|
||||
self.verbose = verbose
|
||||
self.filepath = filepath
|
||||
self.save_best_only = save_best_only
|
||||
self.save_weights_only = save_weights_only
|
||||
|
||||
if mode not in ['auto', 'min', 'max']:
|
||||
warnings.warn('ModelCheckpoint mode %s is unknown, '
|
||||
@@ -288,7 +290,10 @@ class ModelCheckpoint(Callback):
|
||||
% (epoch, self.monitor, self.best,
|
||||
current, filepath))
|
||||
self.best = current
|
||||
self.model.save_weights(filepath, overwrite=True)
|
||||
if self.save_weights_only:
|
||||
self.model.save_weights(filepath, overwrite=True)
|
||||
else:
|
||||
self.model.save(filepath, overwrite=True)
|
||||
else:
|
||||
if self.verbose > 0:
|
||||
print('Epoch %05d: %s did not improve' %
|
||||
@@ -296,7 +301,10 @@ class ModelCheckpoint(Callback):
|
||||
else:
|
||||
if self.verbose > 0:
|
||||
print('Epoch %05d: saving model to %s' % (epoch, filepath))
|
||||
self.model.save_weights(filepath, overwrite=True)
|
||||
if self.save_weights_only:
|
||||
self.model.save_weights(filepath, overwrite=True)
|
||||
else:
|
||||
self.model.save(filepath, overwrite=True)
|
||||
|
||||
|
||||
class EarlyStopping(Callback):
|
||||
@@ -314,7 +322,7 @@ class EarlyStopping(Callback):
|
||||
monitored has stopped increasing.
|
||||
'''
|
||||
def __init__(self, monitor='val_loss', patience=0, verbose=0, mode='auto'):
|
||||
super(Callback, self).__init__()
|
||||
super(EarlyStopping, self).__init__()
|
||||
|
||||
self.monitor = monitor
|
||||
self.patience = patience
|
||||
@@ -323,22 +331,23 @@ class EarlyStopping(Callback):
|
||||
|
||||
if mode not in ['auto', 'min', 'max']:
|
||||
warnings.warn('EarlyStopping mode %s is unknown, '
|
||||
'fallback to auto mode.' % (self.mode), RuntimeWarning)
|
||||
'fallback to auto mode.' % (self.mode),
|
||||
RuntimeWarning)
|
||||
mode = 'auto'
|
||||
|
||||
if mode == 'min':
|
||||
self.monitor_op = np.less
|
||||
self.best = np.Inf
|
||||
elif mode == 'max':
|
||||
self.monitor_op = np.greater
|
||||
self.best = -np.Inf
|
||||
else:
|
||||
if 'acc' in self.monitor:
|
||||
self.monitor_op = np.greater
|
||||
self.best = -np.Inf
|
||||
else:
|
||||
self.monitor_op = np.less
|
||||
self.best = np.Inf
|
||||
|
||||
def on_train_begin(self, logs={}):
|
||||
self.wait = 0 # Allow instances to be re-used
|
||||
self.best = np.Inf if self.monitor_op == np.less else -np.Inf
|
||||
|
||||
def on_epoch_end(self, epoch, logs={}):
|
||||
current = logs.get(self.monitor)
|
||||
@@ -365,12 +374,19 @@ class RemoteMonitor(Callback):
|
||||
# Arguments
|
||||
root: root url to which the events will be sent (at the end
|
||||
of every epoch). Events are sent to
|
||||
`root + '/publish/epoch/end/'`. Calls are HTTP POST,
|
||||
with a `data` argument which is a JSON-encoded dictionary
|
||||
of event data.
|
||||
`root + '/publish/epoch/end/'` by default. Calls are
|
||||
HTTP POST, with a `data` argument which is a
|
||||
JSON-encoded dictionary of event data.
|
||||
'''
|
||||
def __init__(self, root='http://localhost:9000'):
|
||||
|
||||
def __init__(self,
|
||||
root='http://localhost:9000',
|
||||
path='/publish/epoch/end/',
|
||||
field='data'):
|
||||
super(RemoteMonitor, self).__init__()
|
||||
self.root = root
|
||||
self.path = path
|
||||
self.field = field
|
||||
|
||||
def on_epoch_end(self, epoch, logs={}):
|
||||
import requests
|
||||
@@ -378,10 +394,9 @@ class RemoteMonitor(Callback):
|
||||
send['epoch'] = epoch
|
||||
for k, v in logs.items():
|
||||
send[k] = v
|
||||
|
||||
try:
|
||||
requests.post(self.root + '/publish/epoch/end/',
|
||||
{'data': json.dumps(send)})
|
||||
requests.post(self.root + self.path,
|
||||
{self.field: json.dumps(send)})
|
||||
except:
|
||||
print('Warning: could not reach RemoteMonitor '
|
||||
'root server at ' + str(self.root))
|
||||
@@ -427,19 +442,24 @@ class TensorBoard(Callback):
|
||||
|
||||
# Arguments
|
||||
log_dir: the path of the directory where to save the log
|
||||
files to be parsed by tensorboard
|
||||
files to be parsed by Tensorboard
|
||||
histogram_freq: frequency (in epochs) at which to compute activation
|
||||
histograms for the layers of the model. If set to 0,
|
||||
histograms won't be computed.
|
||||
write_graph: whether to visualize the graph in Tensorboard.
|
||||
The log file can become quite large when
|
||||
write_graph is set to True.
|
||||
'''
|
||||
def __init__(self, log_dir='./logs', histogram_freq=0):
|
||||
super(Callback, self).__init__()
|
||||
|
||||
def __init__(self, log_dir='./logs', histogram_freq=0, write_graph=True):
|
||||
super(TensorBoard, self).__init__()
|
||||
if K._BACKEND != 'tensorflow':
|
||||
raise Exception('TensorBoard callback only works '
|
||||
'with the TensorFlow backend.')
|
||||
self.log_dir = log_dir
|
||||
self.histogram_freq = histogram_freq
|
||||
self.merged = None
|
||||
self.write_graph = write_graph
|
||||
|
||||
def _set_model(self, model):
|
||||
import tensorflow as tf
|
||||
@@ -447,41 +467,42 @@ class TensorBoard(Callback):
|
||||
|
||||
self.model = model
|
||||
self.sess = KTF.get_session()
|
||||
if self.histogram_freq and not self.merged:
|
||||
mod_type = self.model.get_config()['name']
|
||||
if mod_type == 'Sequential':
|
||||
layers = {l.get_config()['name']: l for l in self.model.layers}
|
||||
elif mod_type == 'Graph':
|
||||
layers = self.model.nodes
|
||||
else:
|
||||
raise Exception('Unrecognized model:',
|
||||
self.model.get_config()['name'])
|
||||
for l in layers:
|
||||
cur_layer = layers[l]
|
||||
if hasattr(cur_layer, 'W'):
|
||||
tf.histogram_summary('{}_W'.format(l), cur_layer.W)
|
||||
if hasattr(cur_layer, 'b'):
|
||||
tf.histogram_summary('{}_b'.format(l), cur_layer.b)
|
||||
if hasattr(cur_layer, 'get_output'):
|
||||
tf.histogram_summary('{}_out'.format(l),
|
||||
cur_layer.get_output())
|
||||
if self.histogram_freq and self.merged is None:
|
||||
layers = self.model.layers
|
||||
for layer in layers:
|
||||
if hasattr(layer, 'W'):
|
||||
tf.histogram_summary('{}_W'.format(layer), layer.W)
|
||||
if hasattr(layer, 'b'):
|
||||
tf.histogram_summary('{}_b'.format(layer), layer.b)
|
||||
if hasattr(layer, 'output'):
|
||||
tf.histogram_summary('{}_out'.format(layer),
|
||||
layer.output)
|
||||
self.merged = tf.merge_all_summaries()
|
||||
self.writer = tf.train.SummaryWriter(self.log_dir,
|
||||
self.sess.graph_def)
|
||||
if self.write_graph:
|
||||
if parse_version(tf.__version__) >= parse_version('0.8.0'):
|
||||
self.writer = tf.train.SummaryWriter(self.log_dir,
|
||||
self.sess.graph)
|
||||
else:
|
||||
self.writer = tf.train.SummaryWriter(self.log_dir,
|
||||
self.sess.graph_def)
|
||||
else:
|
||||
self.writer = tf.train.SummaryWriter(self.log_dir)
|
||||
|
||||
def on_epoch_end(self, epoch, logs={}):
|
||||
import tensorflow as tf
|
||||
|
||||
if self.model.validation_data and self.histogram_freq:
|
||||
if epoch % self.histogram_freq == 0:
|
||||
if self.params.get('show_accuracy'):
|
||||
test_function = self.model._test_with_acc
|
||||
else:
|
||||
test_function = self.model._test
|
||||
names = [v.name for v in test_function.inputs]
|
||||
# TODO: implement batched calls to sess.run
|
||||
# (current call will likely go OOM on GPU)
|
||||
feed_dict = dict(zip(names, self.model.validation_data))
|
||||
if self.model.uses_learning_phase:
|
||||
cut_v_data = len(self.model.inputs)
|
||||
val_data = self.model.validation_data[:cut_v_data] + [0]
|
||||
tensors = self.model.inputs + [K.learning_phase()]
|
||||
else:
|
||||
val_data = self.model.validation_data
|
||||
tensors = self.model.inputs
|
||||
feed_dict = dict(zip(tensors, val_data))
|
||||
result = self.sess.run([self.merged], feed_dict=feed_dict)
|
||||
summary_str = result[0]
|
||||
self.writer.add_summary(summary_str, epoch)
|
||||
|
||||
+8
-10
@@ -7,7 +7,7 @@ class Constraint(object):
|
||||
return p
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__}
|
||||
return {'name': self.__class__.__name__}
|
||||
|
||||
|
||||
class MaxNorm(Constraint):
|
||||
@@ -42,9 +42,9 @@ class MaxNorm(Constraint):
|
||||
return p
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"m": self.m,
|
||||
"axis": self.axis}
|
||||
return {'name': self.__class__.__name__,
|
||||
'm': self.m,
|
||||
'axis': self.axis}
|
||||
|
||||
|
||||
class NonNeg(Constraint):
|
||||
@@ -79,17 +79,15 @@ class UnitNorm(Constraint):
|
||||
return p / (K.epsilon() + K.sqrt(K.sum(K.square(p), axis=self.axis, keepdims=True)))
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"axis": self.axis}
|
||||
return {'name': self.__class__.__name__,
|
||||
'axis': self.axis}
|
||||
|
||||
|
||||
identity = Constraint
|
||||
maxnorm = MaxNorm
|
||||
nonneg = NonNeg
|
||||
unitnorm = UnitNorm
|
||||
|
||||
from .utils.generic_utils import get_from_module
|
||||
|
||||
|
||||
def get(identifier, kwargs=None):
|
||||
return get_from_module(identifier, globals(), 'constraint', instantiate=True, kwargs=kwargs)
|
||||
return get_from_module(identifier, globals(), 'constraint',
|
||||
instantiate=True, kwargs=kwargs)
|
||||
|
||||
@@ -2,7 +2,6 @@
|
||||
from __future__ import absolute_import
|
||||
import sys
|
||||
from six.moves import cPickle
|
||||
from six.moves import range
|
||||
|
||||
|
||||
def load_batch(fpath, label_key='labels'):
|
||||
|
||||
+58
-11
@@ -4,26 +4,58 @@ import gzip
|
||||
from ..utils.data_utils import get_file
|
||||
from six.moves import zip
|
||||
import numpy as np
|
||||
import sys
|
||||
|
||||
|
||||
def load_data(path="imdb.pkl", nb_words=None, skip_top=0,
|
||||
maxlen=None, test_split=0.2, seed=113,
|
||||
def load_data(path='imdb_full.pkl', nb_words=None, skip_top=0,
|
||||
maxlen=None, seed=113,
|
||||
start_char=1, oov_char=2, index_from=3):
|
||||
'''
|
||||
# Arguments
|
||||
path: where to store the data (in `/.keras/dataset`)
|
||||
nb_words: max number of words to include. Words are ranked
|
||||
by how often they occur (in the training set) and only
|
||||
the most frequent words are kept
|
||||
skip_top: skip the top N most frequently occuring words
|
||||
(which may not be informative).
|
||||
maxlen: truncate sequences after this length.
|
||||
seed: random seed for sample shuffling.
|
||||
start_char: The start of a sequence will be marked with this character.
|
||||
Set to 1 because 0 is usually the padding character.
|
||||
oov_char: words that were cut out because of the `nb_words`
|
||||
or `skip_top` limit will be replaced with this character.
|
||||
index_from: index actual words with this index and higher.
|
||||
|
||||
path = get_file(path, origin="https://s3.amazonaws.com/text-datasets/imdb.pkl")
|
||||
Note that the 'out of vocabulary' character is only used for
|
||||
words that were present in the training set but are not included
|
||||
because they're not making the `nb_words` cut here.
|
||||
Words that were not seen in the trining set but are in the test set
|
||||
have simply been skipped.
|
||||
'''
|
||||
path = get_file(path,
|
||||
origin='https://s3.amazonaws.com/text-datasets/imdb_full.pkl',
|
||||
md5_hash='d091312047c43cf9e4e38fef92437263')
|
||||
|
||||
if path.endswith(".gz"):
|
||||
if path.endswith('.gz'):
|
||||
f = gzip.open(path, 'rb')
|
||||
else:
|
||||
f = open(path, 'rb')
|
||||
|
||||
X, labels = cPickle.load(f)
|
||||
(x_train, labels_train), (x_test, labels_test) = cPickle.load(f)
|
||||
f.close()
|
||||
|
||||
np.random.seed(seed)
|
||||
np.random.shuffle(X)
|
||||
np.random.shuffle(x_train)
|
||||
np.random.seed(seed)
|
||||
np.random.shuffle(labels)
|
||||
np.random.shuffle(labels_train)
|
||||
|
||||
np.random.seed(seed * 2)
|
||||
np.random.shuffle(x_test)
|
||||
np.random.seed(seed * 2)
|
||||
np.random.shuffle(labels_test)
|
||||
|
||||
X = x_train + x_test
|
||||
labels = labels_train + labels_test
|
||||
|
||||
if start_char is not None:
|
||||
X = [[start_char] + [w + index_from for w in x] for x in X]
|
||||
@@ -60,10 +92,25 @@ def load_data(path="imdb.pkl", nb_words=None, skip_top=0,
|
||||
nX.append(nx)
|
||||
X = nX
|
||||
|
||||
X_train = X[:int(len(X) * (1 - test_split))]
|
||||
y_train = labels[:int(len(X) * (1 - test_split))]
|
||||
X_train = np.array(X[:len(x_train)])
|
||||
y_train = np.array(labels[:len(x_train)])
|
||||
|
||||
X_test = X[int(len(X) * (1 - test_split)):]
|
||||
y_test = labels[int(len(X) * (1 - test_split)):]
|
||||
X_test = np.array(X[len(x_train):])
|
||||
y_test = np.array(labels[len(x_train):])
|
||||
|
||||
return (X_train, y_train), (X_test, y_test)
|
||||
|
||||
|
||||
def get_word_index(path='imdb_word_index.pkl'):
|
||||
path = get_file(path,
|
||||
origin='https://s3.amazonaws.com/text-datasets/imdb_word_index.pkl',
|
||||
md5_hash='72d94b01291be4ff843198d3b0e1e4d7')
|
||||
f = open(path, 'rb')
|
||||
|
||||
if sys.version_info < (3,):
|
||||
data = cPickle.load(f)
|
||||
else:
|
||||
data = cPickle.load(f, encoding='latin1')
|
||||
|
||||
f.close()
|
||||
return data
|
||||
|
||||
@@ -4,13 +4,14 @@ from ..utils.data_utils import get_file
|
||||
from six.moves import cPickle
|
||||
from six.moves import zip
|
||||
import numpy as np
|
||||
import sys
|
||||
|
||||
|
||||
def load_data(path="reuters.pkl", nb_words=None, skip_top=0,
|
||||
def load_data(path='reuters.pkl', nb_words=None, skip_top=0,
|
||||
maxlen=None, test_split=0.2, seed=113,
|
||||
start_char=1, oov_char=2, index_from=3):
|
||||
|
||||
path = get_file(path, origin="https://s3.amazonaws.com/text-datasets/reuters.pkl")
|
||||
path = get_file(path, origin='https://s3.amazonaws.com/text-datasets/reuters.pkl')
|
||||
f = open(path, 'rb')
|
||||
X, labels = cPickle.load(f)
|
||||
f.close()
|
||||
@@ -61,7 +62,14 @@ def load_data(path="reuters.pkl", nb_words=None, skip_top=0,
|
||||
return (X_train, y_train), (X_test, y_test)
|
||||
|
||||
|
||||
def get_word_index(path="reuters_word_index.pkl"):
|
||||
path = get_file(path, origin="https://s3.amazonaws.com/text-datasets/reuters_word_index.pkl")
|
||||
def get_word_index(path='reuters_word_index.pkl'):
|
||||
path = get_file(path, origin='https://s3.amazonaws.com/text-datasets/reuters_word_index.pkl')
|
||||
f = open(path, 'rb')
|
||||
return cPickle.load(f)
|
||||
|
||||
if sys.version_info < (3,):
|
||||
data = cPickle.load(f)
|
||||
else:
|
||||
data = cPickle.load(f, encoding='latin1')
|
||||
|
||||
f.close()
|
||||
return data
|
||||
|
||||
@@ -0,0 +1,10 @@
|
||||
# note: topology.Node is an internal class,
|
||||
# it isn't meant to be used by Keras users.
|
||||
from .topology import InputSpec
|
||||
from .topology import Input
|
||||
from .topology import InputLayer
|
||||
from .topology import Layer
|
||||
from .topology import Merge
|
||||
from .topology import merge
|
||||
from .topology import get_source_inputs
|
||||
from .training import Model
|
||||
Diferenças do arquivo suprimidas por serem muito extensas
Carregar Diff
Diferenças do arquivo suprimidas por serem muito extensas
Carregar Diff
@@ -12,11 +12,13 @@ def get_fans(shape, dim_ordering='th'):
|
||||
# TH kernel shape: (depth, input_depth, ...)
|
||||
# TF kernel shape: (..., input_depth, depth)
|
||||
if dim_ordering == 'th':
|
||||
fan_in = np.prod(shape[1:])
|
||||
fan_out = shape[0]
|
||||
receptive_field_size = np.prod(shape[2:])
|
||||
fan_in = shape[1] * receptive_field_size
|
||||
fan_out = shape[0] * receptive_field_size
|
||||
elif dim_ordering == 'tf':
|
||||
fan_in = np.prod(shape[:-1])
|
||||
fan_out = shape[-1]
|
||||
receptive_field_size = np.prod(shape[:2])
|
||||
fan_in = shape[-2] * receptive_field_size
|
||||
fan_out = shape[-1] * receptive_field_size
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + dim_ordering)
|
||||
else:
|
||||
@@ -27,13 +29,11 @@ def get_fans(shape, dim_ordering='th'):
|
||||
|
||||
|
||||
def uniform(shape, scale=0.05, name=None):
|
||||
return K.variable(np.random.uniform(low=-scale, high=scale, size=shape),
|
||||
name=name)
|
||||
return K.random_uniform_variable(shape, -scale, scale, name=name)
|
||||
|
||||
|
||||
def normal(shape, scale=0.05, name=None):
|
||||
return K.variable(np.random.normal(loc=0.0, scale=scale, size=shape),
|
||||
name=name)
|
||||
return K.random_normal_variable(shape, 0.0, scale, name=name)
|
||||
|
||||
|
||||
def lecun_uniform(shape, name=None, dim_ordering='th'):
|
||||
|
||||
@@ -1,8 +1,12 @@
|
||||
from __future__ import absolute_import
|
||||
from ..engine import Layer, Input, InputLayer, Merge, merge, InputSpec
|
||||
from .core import *
|
||||
from .convolutional import *
|
||||
from .pooling import *
|
||||
from .local import *
|
||||
from .recurrent import *
|
||||
from .normalization import *
|
||||
from .embeddings import *
|
||||
from .noise import *
|
||||
from .advanced_activations import *
|
||||
from .wrappers import *
|
||||
|
||||
@@ -1,13 +1,14 @@
|
||||
from .. import initializations
|
||||
from ..layers.core import MaskedLayer
|
||||
from ..engine import Layer
|
||||
from .. import backend as K
|
||||
import numpy as np
|
||||
|
||||
|
||||
class LeakyReLU(MaskedLayer):
|
||||
class LeakyReLU(Layer):
|
||||
'''Special version of a Rectified Linear Unit
|
||||
that allows a small gradient when the unit is not active:
|
||||
`f(x) = alpha*x for x < 0`.
|
||||
`f(x) = alpha * x for x < 0`,
|
||||
`f(x) = x for x >= 0`.
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
@@ -21,22 +22,25 @@ class LeakyReLU(MaskedLayer):
|
||||
alpha: float >= 0. Negative slope coefficient.
|
||||
'''
|
||||
def __init__(self, alpha=0.3, **kwargs):
|
||||
super(LeakyReLU, self).__init__(**kwargs)
|
||||
self.supports_masking = True
|
||||
self.alpha = alpha
|
||||
super(LeakyReLU, self).__init__(**kwargs)
|
||||
|
||||
def get_output(self, train):
|
||||
X = self.get_input(train)
|
||||
return K.relu(X, alpha=self.alpha)
|
||||
def call(self, x, mask=None):
|
||||
return K.relu(x, alpha=self.alpha)
|
||||
|
||||
def get_config(self):
|
||||
config = {'name': self.__class__.__name__,
|
||||
'alpha': self.alpha}
|
||||
config = {'alpha': self.alpha}
|
||||
base_config = super(LeakyReLU, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class PReLU(MaskedLayer):
|
||||
'''
|
||||
class PReLU(Layer):
|
||||
'''Parametric Rectified Linear Unit:
|
||||
`f(x) = alphas * x for x < 0`,
|
||||
`f(x) = x for x >= 0`,
|
||||
where `alphas` is a learned array with the same shape as x.
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
(tuple of integers, does not include the samples axis)
|
||||
@@ -45,21 +49,21 @@ class PReLU(MaskedLayer):
|
||||
# Output shape
|
||||
Same shape as the input.
|
||||
|
||||
# Arguments:
|
||||
# Arguments
|
||||
init: initialization function for the weights.
|
||||
weights: initial weights, as a list of a single numpy array.
|
||||
weights: initial weights, as a list of a single Numpy array.
|
||||
|
||||
# References:
|
||||
# References
|
||||
- [Delving Deep into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification](http://arxiv.org/pdf/1502.01852v1.pdf)
|
||||
'''
|
||||
def __init__(self, init='zero', weights=None, **kwargs):
|
||||
self.supports_masking = True
|
||||
self.init = initializations.get(init)
|
||||
self.initial_weights = weights
|
||||
super(PReLU, self).__init__(**kwargs)
|
||||
|
||||
def build(self):
|
||||
input_shape = self.input_shape[1:]
|
||||
self.alphas = self.init(input_shape,
|
||||
def build(self, input_shape):
|
||||
self.alphas = self.init(input_shape[1:],
|
||||
name='{}_alphas'.format(self.name))
|
||||
self.trainable_weights = [self.alphas]
|
||||
|
||||
@@ -67,21 +71,22 @@ class PReLU(MaskedLayer):
|
||||
self.set_weights(self.initial_weights)
|
||||
del self.initial_weights
|
||||
|
||||
def get_output(self, train):
|
||||
X = self.get_input(train)
|
||||
pos = K.relu(X)
|
||||
neg = self.alphas * (X - abs(X)) * 0.5
|
||||
def call(self, x, mask=None):
|
||||
pos = K.relu(x)
|
||||
neg = self.alphas * (x - abs(x)) * 0.5
|
||||
return pos + neg
|
||||
|
||||
def get_config(self):
|
||||
config = {'name': self.__class__.__name__,
|
||||
'init': self.init.__name__}
|
||||
config = {'init': self.init.__name__}
|
||||
base_config = super(PReLU, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class ELU(MaskedLayer):
|
||||
'''
|
||||
class ELU(Layer):
|
||||
'''Exponential Linear Unit:
|
||||
`f(x) = alpha * (exp(x) - 1.) for x < 0`,
|
||||
`f(x) = x for x >= 0`.
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
(tuple of integers, does not include the samples axis)
|
||||
@@ -97,24 +102,24 @@ class ELU(MaskedLayer):
|
||||
- [Fast and Accurate Deep Network Learning by Exponential Linear Units (ELUs)](http://arxiv.org/pdf/1511.07289v1.pdf)
|
||||
'''
|
||||
def __init__(self, alpha=1.0, **kwargs):
|
||||
self.supports_masking = True
|
||||
self.alpha = K.cast_to_floatx(alpha)
|
||||
super(ELU, self).__init__(**kwargs)
|
||||
self.alpha = alpha
|
||||
|
||||
def get_output(self, train):
|
||||
X = self.get_input(train)
|
||||
pos = K.relu(X)
|
||||
neg = (X - abs(X)) * 0.5
|
||||
def call(self, x, mask=None):
|
||||
pos = K.relu(x)
|
||||
neg = (x - abs(x)) * 0.5
|
||||
return pos + self.alpha * (K.exp(neg) - 1.)
|
||||
|
||||
def get_config(self):
|
||||
config = {'name': self.__class__.__name__,
|
||||
'alpha': self.alpha}
|
||||
config = {'alpha': float(self.alpha)}
|
||||
base_config = super(ELU, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class ParametricSoftplus(MaskedLayer):
|
||||
'''Parametric Softplus of the form: alpha * log(1 + exp(beta * X))
|
||||
class ParametricSoftplus(Layer):
|
||||
'''Parametric Softplus:
|
||||
`alpha * log(1 + exp(beta * x))`
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
@@ -129,18 +134,19 @@ class ParametricSoftplus(MaskedLayer):
|
||||
beta_init: float. Initial values of the beta weights.
|
||||
weights: initial weights, as a list of 2 numpy arrays.
|
||||
|
||||
# References:
|
||||
# References
|
||||
- [Inferring Nonlinear Neuronal Computation Based on Physiologically Plausible Inputs](http://journals.plos.org/ploscompbiol/article?id=10.1371/journal.pcbi.1003143)
|
||||
'''
|
||||
def __init__(self, alpha_init=0.2, beta_init=5.0,
|
||||
weights=None, **kwargs):
|
||||
self.alpha_init = alpha_init
|
||||
self.beta_init = beta_init
|
||||
self.supports_masking = True
|
||||
self.alpha_init = K.cast_to_floatx(alpha_init)
|
||||
self.beta_init = K.cast_to_floatx(beta_init)
|
||||
self.initial_weights = weights
|
||||
super(ParametricSoftplus, self).__init__(**kwargs)
|
||||
|
||||
def build(self):
|
||||
input_shape = self.input_shape[1:]
|
||||
def build(self, input_shape):
|
||||
input_shape = input_shape[1:]
|
||||
self.alphas = K.variable(self.alpha_init * np.ones(input_shape),
|
||||
name='{}_alphas'.format(self.name))
|
||||
self.betas = K.variable(self.beta_init * np.ones(input_shape),
|
||||
@@ -151,20 +157,20 @@ class ParametricSoftplus(MaskedLayer):
|
||||
self.set_weights(self.initial_weights)
|
||||
del self.initial_weights
|
||||
|
||||
def get_output(self, train):
|
||||
X = self.get_input(train)
|
||||
return K.softplus(self.betas * X) * self.alphas
|
||||
def call(self, x, mask=None):
|
||||
return K.softplus(self.betas * x) * self.alphas
|
||||
|
||||
def get_config(self):
|
||||
config = {'name': self.__class__.__name__,
|
||||
'alpha_init': self.alpha_init,
|
||||
'beta_init': self.beta_init}
|
||||
config = {'alpha_init': float(self.alpha_init),
|
||||
'beta_init': float(self.beta_init)}
|
||||
base_config = super(ParametricSoftplus, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class ThresholdedLinear(MaskedLayer):
|
||||
'''Thresholded Linear Activation.
|
||||
class ThresholdedReLU(Layer):
|
||||
'''Thresholded Rectified Linear Unit:
|
||||
`f(x) = x for x > theta`
|
||||
`f(x) = 0 otherwise`.
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
@@ -178,57 +184,24 @@ class ThresholdedLinear(MaskedLayer):
|
||||
theta: float >= 0. Threshold location of activation.
|
||||
|
||||
# References
|
||||
[Zero-Bias Autoencoders and the Benefits of Co-Adapting Features](http://arxiv.org/pdf/1402.3337.pdf)
|
||||
'''
|
||||
def __init__(self, theta=1.0, **kwargs):
|
||||
super(ThresholdedLinear, self).__init__(**kwargs)
|
||||
self.theta = theta
|
||||
|
||||
def get_output(self, train):
|
||||
X = self.get_input(train)
|
||||
return K.switch(K.abs(X) < self.theta, 0, X)
|
||||
|
||||
def get_config(self):
|
||||
config = {'name': self.__class__.__name__,
|
||||
'theta': self.theta}
|
||||
base_config = super(ThresholdedLinear, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class ThresholdedReLU(MaskedLayer):
|
||||
'''Thresholded Rectified Activation.
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
(tuple of integers, does not include the samples axis)
|
||||
when using this layer as the first layer in a model.
|
||||
|
||||
# Output shape
|
||||
Same shape as the input.
|
||||
|
||||
# Arguments
|
||||
theta: float >= 0. Threshold location of activation.
|
||||
|
||||
# References
|
||||
[Zero-Bias Autoencoders and the Benefits of Co-Adapting Features](http://arxiv.org/pdf/1402.3337.pdf)
|
||||
- [Zero-Bias Autoencoders and the Benefits of Co-Adapting Features](http://arxiv.org/pdf/1402.3337.pdf)
|
||||
'''
|
||||
def __init__(self, theta=1.0, **kwargs):
|
||||
self.supports_masking = True
|
||||
self.theta = K.cast_to_floatx(theta)
|
||||
super(ThresholdedReLU, self).__init__(**kwargs)
|
||||
self.theta = theta
|
||||
|
||||
def get_output(self, train):
|
||||
X = self.get_input(train)
|
||||
return K.switch(X > self.theta, X, 0)
|
||||
def call(self, x, mask=None):
|
||||
return x * K.cast(x > self.theta, K.floatx())
|
||||
|
||||
def get_config(self):
|
||||
config = {'name': self.__class__.__name__,
|
||||
'theta': self.theta}
|
||||
config = {'theta': float(self.theta)}
|
||||
base_config = super(ThresholdedReLU, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class SReLU(MaskedLayer):
|
||||
'''SReLU
|
||||
class SReLU(Layer):
|
||||
'''S-shaped Rectified Linear Unit.
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
@@ -245,42 +218,49 @@ class SReLU(MaskedLayer):
|
||||
a_right_init: initialization function for the right part slope
|
||||
|
||||
# References
|
||||
[Deep Learning with S-shaped Rectified Linear Activation Units](http://arxiv.org/abs/1512.07030)
|
||||
- [Deep Learning with S-shaped Rectified Linear Activation Units](http://arxiv.org/abs/1512.07030)
|
||||
'''
|
||||
def __init__(self, t_left_init='zero', a_left_init='glorot_uniform',
|
||||
t_right_init='glorot_uniform', a_right_init='one', **kwargs):
|
||||
self.t_left_init = initializations.get(t_left_init)
|
||||
self.a_left_init = initializations.get(a_left_init)
|
||||
self.t_right_init = initializations.get(t_right_init)
|
||||
self.a_right_init = initializations.get(a_right_init)
|
||||
self.supports_masking = True
|
||||
self.t_left_init = t_left_init
|
||||
self.a_left_init = a_left_init
|
||||
self.t_right_init = t_right_init
|
||||
self.a_right_init = a_right_init
|
||||
super(SReLU, self).__init__(**kwargs)
|
||||
|
||||
def build(self):
|
||||
input_shape = self.input_shape[1:]
|
||||
self.t_left = self.t_left_init(input_shape,
|
||||
name='{}_t_left'.format(self.name))
|
||||
self.a_left = self.a_left_init(input_shape,
|
||||
name='{}_a_left'.format(self.name))
|
||||
self.t_right = self.t_right_init(input_shape,
|
||||
name='{}_t_right'.format(self.name))
|
||||
self.a_right = self.a_right_init(input_shape,
|
||||
name='{}_a_right'.format(self.name))
|
||||
def build(self, input_shape):
|
||||
input_shape = input_shape[1:]
|
||||
|
||||
t_left_init = initializations.get(self.t_left_init)
|
||||
a_left_init = initializations.get(self.a_left_init)
|
||||
t_right_init = initializations.get(self.t_right_init)
|
||||
a_right_init = initializations.get(self.a_right_init)
|
||||
|
||||
self.t_left = t_left_init(input_shape,
|
||||
name='{}_t_left'.format(self.name))
|
||||
self.a_left = a_left_init(input_shape,
|
||||
name='{}_a_left'.format(self.name))
|
||||
self.t_right = t_right_init(input_shape,
|
||||
name='{}_t_right'.format(self.name))
|
||||
self.a_right = a_right_init(input_shape,
|
||||
name='{}_a_right'.format(self.name))
|
||||
# ensure the the right part is always to the right of the left
|
||||
self.t_right_actual = self.t_left + abs(self.t_right)
|
||||
self.trainable_weights = [self.t_left, self.a_left,
|
||||
self.t_right, self.a_right]
|
||||
|
||||
def get_output(self, train=False):
|
||||
X = self.get_input(train)
|
||||
Y_left_and_center = self.t_left + K.relu(X - self.t_left,
|
||||
def call(self, x, mask=None):
|
||||
Y_left_and_center = self.t_left + K.relu(x - self.t_left,
|
||||
self.a_left,
|
||||
self.t_right_actual - self.t_left)
|
||||
Y_right = K.relu(X - self.t_right_actual) * self.a_right
|
||||
Y_right = K.relu(x - self.t_right_actual) * self.a_right
|
||||
return Y_left_and_center + Y_right
|
||||
|
||||
def get_config(self):
|
||||
return {'name': self.__class__.__name__,
|
||||
't_left_init': self.t_left_init.__name__,
|
||||
'a_left_init': self.a_left_init.__name__,
|
||||
't_right_init': self.t_right_init.__name__,
|
||||
'a_right_init': self.a_right_init.__name__}
|
||||
config = {'t_left_init': self.t_left_init,
|
||||
'a_left_init': self.a_left_init,
|
||||
't_right_init': self.t_right_init,
|
||||
'a_right_init': self.a_right_init}
|
||||
base_config = super(SReLU, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
@@ -1,616 +0,0 @@
|
||||
# -*- coding: utf-8 -*-
|
||||
from __future__ import absolute_import
|
||||
from __future__ import print_function
|
||||
|
||||
from collections import OrderedDict
|
||||
from .. import backend as K
|
||||
from ..layers.core import Layer, Merge, Siamese, SiameseHead
|
||||
from six.moves import range
|
||||
|
||||
|
||||
class Sequential(Layer):
|
||||
'''The Sequential container is a linear stack of layers.
|
||||
Apart from the `add` methods and the `layers` constructor argument,
|
||||
the API is identical to that of the `Layer` class.
|
||||
|
||||
This class is also the basis for the `keras.models.Sequential` model.
|
||||
|
||||
# Arguments
|
||||
layers: list of layers to be added to the container.
|
||||
'''
|
||||
def __init__(self, layers=[]):
|
||||
self.layers = []
|
||||
self.layer_cache = {}
|
||||
self.shape_cache = {}
|
||||
for layer in layers:
|
||||
self.add(layer)
|
||||
self._cache_enabled = True
|
||||
|
||||
@property
|
||||
def cache_enabled(self):
|
||||
return self._cache_enabled
|
||||
|
||||
@cache_enabled.setter
|
||||
def cache_enabled(self, value):
|
||||
self._cache_enabled = value
|
||||
for l in self.layers:
|
||||
l.cache_enabled = value
|
||||
|
||||
@property
|
||||
def layer_cache(self):
|
||||
return super(Sequential, self).layer_cache
|
||||
|
||||
@layer_cache.setter
|
||||
def layer_cache(self, value):
|
||||
self._layer_cache = value
|
||||
for layer in self.layers:
|
||||
layer.layer_cache = self._layer_cache
|
||||
|
||||
@property
|
||||
def shape_cache(self):
|
||||
return super(Sequential, self).shape_cache
|
||||
|
||||
@shape_cache.setter
|
||||
def shape_cache(self, value):
|
||||
self._shape_cache = value
|
||||
for layer in self.layers:
|
||||
layer.shape_cache = self._shape_cache
|
||||
|
||||
def set_previous(self, layer, reset_weights=True):
|
||||
self.layers[0].set_previous(layer, reset_weights)
|
||||
|
||||
def clear_previous(self, reset_weights=True):
|
||||
self.layers[0].clear_previous(reset_weights)
|
||||
|
||||
def add(self, layer):
|
||||
layer.layer_cache = self.layer_cache
|
||||
layer.shape_cache = self.shape_cache
|
||||
self.layers.append(layer)
|
||||
if len(self.layers) > 1:
|
||||
self.layers[-1].set_previous(self.layers[-2])
|
||||
if not hasattr(self.layers[0], 'input'):
|
||||
self.set_input()
|
||||
|
||||
@property
|
||||
def trainable_weights(self):
|
||||
weights = []
|
||||
for l in self.layers:
|
||||
if l.trainable:
|
||||
weights += l.get_params()[0]
|
||||
return weights
|
||||
|
||||
@property
|
||||
def regularizers(self):
|
||||
regularizers = []
|
||||
for l in self.layers:
|
||||
if l.trainable:
|
||||
regularizers += l.get_params()[1]
|
||||
return regularizers
|
||||
|
||||
@property
|
||||
def constraints(self):
|
||||
constraints = []
|
||||
for l in self.layers:
|
||||
if l.trainable:
|
||||
constraints += l.get_params()[2]
|
||||
return constraints
|
||||
|
||||
@property
|
||||
def updates(self):
|
||||
updates = []
|
||||
for l in self.layers:
|
||||
if l.trainable:
|
||||
updates += l.get_params()[3]
|
||||
return updates
|
||||
|
||||
@property
|
||||
def state_updates(self):
|
||||
"""
|
||||
Return the `updates` from all layers in the sequence that are
|
||||
stateful. This is useful for separating _training_ updates and
|
||||
_prediction_ updates for when we need to update a layers internal state
|
||||
during a stateful prediction.
|
||||
"""
|
||||
state_updates = []
|
||||
for l in self.layers:
|
||||
if getattr(l, 'stateful', False):
|
||||
state_updates += l.get_params()[3]
|
||||
return state_updates
|
||||
|
||||
def reset_states(self):
|
||||
for l in self.layers:
|
||||
if hasattr(l, 'reset_states') and getattr(l, 'stateful', False):
|
||||
l.reset_states()
|
||||
|
||||
@property
|
||||
def output_shape(self):
|
||||
return self.layers[-1].output_shape
|
||||
|
||||
def get_output(self, train=False):
|
||||
return self.layers[-1].get_output(train)
|
||||
|
||||
def set_input(self):
|
||||
for l in self.layers:
|
||||
if hasattr(l, 'input'):
|
||||
ndim = K.ndim(l.input)
|
||||
self.layers[0].input = K.placeholder(ndim=ndim)
|
||||
break
|
||||
|
||||
def get_input(self, train=False):
|
||||
if not hasattr(self.layers[0], 'input'):
|
||||
self.set_input()
|
||||
return self.layers[0].get_input(train)
|
||||
|
||||
@property
|
||||
def input_shape(self):
|
||||
return self.layers[0].input_shape
|
||||
|
||||
@property
|
||||
def input(self):
|
||||
return self.get_input()
|
||||
|
||||
def get_weights(self):
|
||||
weights = []
|
||||
for layer in self.layers:
|
||||
weights += layer.get_weights()
|
||||
return weights
|
||||
|
||||
def set_weights(self, weights):
|
||||
for layer in self.layers:
|
||||
nb_param = len(layer.get_weights())
|
||||
layer.set_weights(weights[:nb_param])
|
||||
weights = weights[nb_param:]
|
||||
|
||||
def get_config(self):
|
||||
return {'name': self.__class__.__name__,
|
||||
'layers': [layer.get_config() for layer in self.layers]}
|
||||
|
||||
def count_params(self):
|
||||
return sum([layer.count_params() for layer in self.layers])
|
||||
|
||||
|
||||
class Graph(Layer):
|
||||
'''Implement a NN graph with arbitrary layer connections,
|
||||
arbitrary number of inputs and arbitrary number of outputs.
|
||||
|
||||
This class is also the basis for the `keras.models.Graph` model.
|
||||
|
||||
Note: `Graph` can only be used as a layer
|
||||
(connect, input, get_input, get_output)
|
||||
when it has exactly one input and one output.
|
||||
'''
|
||||
def __init__(self):
|
||||
self.namespace = set() # strings
|
||||
self.nodes = OrderedDict() # layer-like
|
||||
self.inputs = {} # layer-like
|
||||
self.input_order = [] # strings
|
||||
self.outputs = {} # layer-like
|
||||
self.output_order = [] # strings
|
||||
self.input_config = [] # dicts
|
||||
self.output_config = [] # dicts
|
||||
self.node_config = [] # dicts
|
||||
self.layer_cache = {}
|
||||
self.shape_cache = {}
|
||||
self._cache_enabled = True
|
||||
|
||||
def __call__(self, X, mask=None, train=False):
|
||||
if type(X) != dict:
|
||||
return super(Graph, self).__call__(X, mask, train)
|
||||
else:
|
||||
# turn off layer cache temporarily
|
||||
tmp_cache_enabled = self.cache_enabled
|
||||
self.cache_enabled = False
|
||||
# create a temporary layer for each input
|
||||
tmp_previous = {}
|
||||
for name, input in self.inputs.items():
|
||||
layer = Layer(batch_input_shape=input.input_shape)
|
||||
layer.input = X[name]
|
||||
if hasattr(self, 'get_input_mask'):
|
||||
layer.get_input_mask = lambda _: mask[name]
|
||||
# set temporary previous
|
||||
if hasattr(input, 'previous'):
|
||||
tmp_previous[name] = input.previous
|
||||
input.set_previous(layer, False)
|
||||
Y = self.get_output(train=train)
|
||||
# return previous to what it was
|
||||
for name, input in self.inputs.items():
|
||||
if name in tmp_previous:
|
||||
input.set_previous(tmp_previous[name], False)
|
||||
else:
|
||||
input.clear_previous(False)
|
||||
self.cache_enabled = tmp_cache_enabled
|
||||
return Y
|
||||
|
||||
@property
|
||||
def cache_enabled(self):
|
||||
return self._cache_enabled
|
||||
|
||||
@cache_enabled.setter
|
||||
def cache_enabled(self, value):
|
||||
self._cache_enabled = value
|
||||
for l in self.nodes.values():
|
||||
l.cache_enabled = value
|
||||
for l in self.inputs.values():
|
||||
l.cache_enabled = value
|
||||
|
||||
@property
|
||||
def layer_cache(self):
|
||||
return super(Graph, self).layer_cache
|
||||
|
||||
@layer_cache.setter
|
||||
def layer_cache(self, value):
|
||||
self._layer_cache = value
|
||||
for layer in self.nodes.values():
|
||||
layer.layer_cache = self._layer_cache
|
||||
for layer in self.inputs.values():
|
||||
layer.layer_cache = self._layer_cache
|
||||
|
||||
@property
|
||||
def shape_cache(self):
|
||||
return super(Graph, self).shape_cache
|
||||
|
||||
@shape_cache.setter
|
||||
def shape_cache(self, value):
|
||||
self._shape_cache = value
|
||||
for layer in self.nodes.values():
|
||||
layer.shape_cache = self._shape_cache
|
||||
for layer in self.inputs.values():
|
||||
layer.shape_cache = self._shape_cache
|
||||
|
||||
@property
|
||||
def nb_input(self):
|
||||
return len(self.inputs)
|
||||
|
||||
@property
|
||||
def nb_output(self):
|
||||
return len(self.outputs)
|
||||
|
||||
@property
|
||||
def trainable_weights(self):
|
||||
weights = []
|
||||
for l in self.nodes.values():
|
||||
if l.trainable:
|
||||
weights += l.get_params()[0]
|
||||
return weights
|
||||
|
||||
@property
|
||||
def regularizers(self):
|
||||
regularizers = []
|
||||
for l in self.nodes.values():
|
||||
if l.trainable:
|
||||
regularizers += l.get_params()[1]
|
||||
return regularizers
|
||||
|
||||
@property
|
||||
def constraints(self):
|
||||
constraints = []
|
||||
for l in self.nodes.values():
|
||||
if l.trainable:
|
||||
constraints += l.get_params()[2]
|
||||
return constraints
|
||||
|
||||
@property
|
||||
def updates(self):
|
||||
updates = []
|
||||
for l in self.nodes.values():
|
||||
if l.trainable:
|
||||
updates += l.get_params()[3]
|
||||
return updates
|
||||
|
||||
@property
|
||||
def state_updates(self):
|
||||
"""
|
||||
Return the `updates` from all nodes in that graph for nodes that are
|
||||
stateful. This is useful for separating _training_ updates and
|
||||
_prediction_ updates for when we need to update a layers internal state
|
||||
during a stateful prediction.
|
||||
"""
|
||||
state_updates = []
|
||||
for l in self.nodes.values():
|
||||
if getattr(l, 'stateful', False):
|
||||
state_updates += l.get_params()[3]
|
||||
return state_updates
|
||||
|
||||
def reset_states(self):
|
||||
for l in self.nodes.values():
|
||||
if hasattr(l, 'reset_states') and getattr(l, 'stateful', False):
|
||||
l.reset_states()
|
||||
|
||||
def set_previous(self, layer, connection_map={}, reset_weights=True):
|
||||
if self.nb_input != layer.nb_output:
|
||||
raise Exception('Cannot connect layers: '
|
||||
'input count does not match output count.')
|
||||
if self.nb_input == 1:
|
||||
self.inputs[self.input_order[0]].set_previous(layer, reset_weights)
|
||||
else:
|
||||
if not connection_map:
|
||||
raise Exception('Cannot attach multi-input layer: '
|
||||
'no connection_map provided.')
|
||||
for k, v in connection_map.items():
|
||||
if k in self.inputs and v in layer.outputs:
|
||||
self.inputs[k].set_previous(layer.outputs[v], reset_weights)
|
||||
else:
|
||||
raise Exception('Invalid connection map.')
|
||||
|
||||
def clear_previous(self, reset_weights=True):
|
||||
for k in self.inputs.values():
|
||||
k.clear_previous(reset_weights)
|
||||
|
||||
@property
|
||||
def input_shape(self):
|
||||
if self.nb_input == 1:
|
||||
# return tuple
|
||||
return self.inputs[self.input_order[0]].input_shape
|
||||
else:
|
||||
# return dictionary mapping input names to shape tuples
|
||||
return dict([(k, v.input_shape) for k, v in self.inputs.items()])
|
||||
|
||||
def get_input(self, train=False):
|
||||
if len(self.inputs) == len(self.outputs) == 1:
|
||||
return self.inputs[self.input_order[0]].get_input(train)
|
||||
else:
|
||||
return dict([(k, v.get_input(train)) for k, v in self.inputs.items()])
|
||||
|
||||
@property
|
||||
def input(self):
|
||||
return self.get_input()
|
||||
|
||||
@property
|
||||
def output_shape(self):
|
||||
if self.nb_output == 1:
|
||||
# return tuple
|
||||
return self.outputs[self.output_order[0]].output_shape
|
||||
else:
|
||||
# return dictionary mapping output names to shape tuples
|
||||
return dict([(k, v.output_shape) for k, v in self.outputs.items()])
|
||||
|
||||
def get_output(self, train=False):
|
||||
if len(self.inputs) == len(self.outputs) == 1:
|
||||
return self.outputs[self.output_order[0]].get_output(train)
|
||||
else:
|
||||
return dict([(k, v.get_output(train)) for k, v in self.outputs.items()])
|
||||
|
||||
def add_input(self, name, input_shape=None,
|
||||
batch_input_shape=None, dtype='float'):
|
||||
'''Add an input to the graph.
|
||||
|
||||
# Arguments:
|
||||
name: string. The name of the new input. Must be unique in the graph.
|
||||
input_shape: a tuple of integers, the expected shape of the input samples.
|
||||
Does not include the batch size.
|
||||
batch_input_shape: a tuple of integers, the expected shape of the
|
||||
whole input batch, including the batch size.
|
||||
dtype: 'float' or 'int'.
|
||||
'''
|
||||
if name in self.namespace:
|
||||
raise Exception('Duplicate node identifier: ' + name)
|
||||
self.namespace.add(name)
|
||||
self.input_order.append(name)
|
||||
layer = Layer(name=name) # empty layer
|
||||
if input_shape:
|
||||
layer.set_input_shape((None,) + tuple(input_shape))
|
||||
elif batch_input_shape:
|
||||
layer.set_input_shape(batch_input_shape)
|
||||
if dtype == 'float':
|
||||
layer.input = K.placeholder(shape=layer.input_shape, name=name)
|
||||
else:
|
||||
if (input_shape and len(input_shape) == 1) or (batch_input_shape and len(batch_input_shape) == 2):
|
||||
layer.input = K.placeholder(shape=layer.input_shape,
|
||||
dtype='int32',
|
||||
name=name)
|
||||
else:
|
||||
raise Exception('Type "int" can only be used with ndim==2 (Embedding).')
|
||||
self.inputs[name] = layer
|
||||
config = {'name': name, 'dtype': dtype}
|
||||
if batch_input_shape:
|
||||
config['batch_input_shape'] = batch_input_shape
|
||||
else:
|
||||
config['input_shape'] = input_shape
|
||||
self.input_config.append(config)
|
||||
|
||||
def add_node(self, layer, name, input=None, inputs=[],
|
||||
merge_mode='concat', concat_axis=-1, dot_axes=-1,
|
||||
create_output=False):
|
||||
'''Add a node in the graph. It can be connected to multiple
|
||||
inputs, which will first be merged into one tensor
|
||||
according to the mode specified.
|
||||
|
||||
# Arguments
|
||||
layer: the layer at the node.
|
||||
name: name for the node.
|
||||
input: when connecting the layer to a single input,
|
||||
this is the name of the incoming node.
|
||||
inputs: when connecting the layer to multiple inputs,
|
||||
this is a list of names of incoming nodes.
|
||||
merge_mode: one of {concat, sum, dot, ave, mul}
|
||||
concat_axis: when `merge_mode=='concat'`, this is the
|
||||
input concatenation axis.
|
||||
dot_axes: when `merge_mode='dot'`, this is the contraction axes
|
||||
specification; see the `Merge layer for details.
|
||||
create_output: boolean. Set this to `True` if you want the output
|
||||
of your node to be an output of the graph.
|
||||
'''
|
||||
if name in self.namespace:
|
||||
raise Exception('Duplicate node identifier: ' + name)
|
||||
layer.name = name
|
||||
if input:
|
||||
if input not in self.namespace:
|
||||
raise Exception('Unknown node/input identifier: ' + input)
|
||||
if input in self.nodes:
|
||||
layer.set_previous(self.nodes[input])
|
||||
elif input in self.inputs:
|
||||
layer.set_previous(self.inputs[input])
|
||||
if inputs:
|
||||
to_merge = []
|
||||
for n in inputs:
|
||||
if n in self.nodes:
|
||||
to_merge.append(self.nodes[n])
|
||||
elif n in self.inputs:
|
||||
to_merge.append(self.inputs[n])
|
||||
else:
|
||||
raise Exception('Unknown identifier: ' + n)
|
||||
merge = Merge(to_merge, mode=merge_mode,
|
||||
concat_axis=concat_axis, dot_axes=dot_axes)
|
||||
layer.set_previous(merge)
|
||||
|
||||
self.namespace.add(name)
|
||||
layer.layer_cache = self.layer_cache
|
||||
layer.shape_cache = self.shape_cache
|
||||
self.nodes[name] = layer
|
||||
self.node_config.append({'name': name,
|
||||
'input': input,
|
||||
'inputs': inputs,
|
||||
'merge_mode': merge_mode,
|
||||
'concat_axis': concat_axis,
|
||||
'dot_axes': dot_axes,
|
||||
'create_output': create_output})
|
||||
|
||||
if create_output:
|
||||
self.add_output(name, input=name)
|
||||
|
||||
def add_shared_node(self, layer, name, inputs=[], merge_mode=None,
|
||||
concat_axis=-1, dot_axes=-1, outputs=[],
|
||||
create_output=False):
|
||||
'''Used to share a same layer across multiple nodes.
|
||||
|
||||
Supposed, for instance, that you want to apply one same `Dense`
|
||||
layer after to the output of two different nodes.
|
||||
You can then add the `Dense` layer as a shared node.
|
||||
|
||||
# Arguments
|
||||
layer: The layer to be shared across multiple inputs
|
||||
name: Name of the shared node
|
||||
inputs: List of names of input nodes
|
||||
merge_mode: Same meaning as `merge_mode` argument of `add_node()`
|
||||
concat_axis: Same meaning as `concat_axis` argument of `add_node()`
|
||||
dot_axes: Same meaning as `dot_axes` argument of `add_node()`
|
||||
outputs: Used when `merge_mode=None`. Names for the output nodes.
|
||||
create_output: Same meaning as `create_output` argument of `add_node()`.
|
||||
'''
|
||||
if name in self.namespace:
|
||||
raise Exception('Duplicate node identifier: ' + name)
|
||||
for o in outputs:
|
||||
if o in self.namespace:
|
||||
raise Exception('Duplicate node identifier: ' + o)
|
||||
if merge_mode:
|
||||
if merge_mode not in {'sum', 'ave', 'mul', 'dot', 'cos', 'concat', 'join'}:
|
||||
raise Exception('Invalid merge mode')
|
||||
layers = []
|
||||
for i in range(len(inputs)):
|
||||
input = inputs[i]
|
||||
if input in self.nodes:
|
||||
n = self.nodes[input]
|
||||
if n.__class__.__name__ == 'Siamese':
|
||||
if n.merge_mode is None:
|
||||
for j in range(len(n.inputs)):
|
||||
sh = SiameseHead(j)
|
||||
sh.previous = n
|
||||
layers.append(sh)
|
||||
else:
|
||||
layers.append(n)
|
||||
else:
|
||||
layers.append(n)
|
||||
elif input in self.inputs:
|
||||
n = self.inputs[input]
|
||||
layers.append(n)
|
||||
else:
|
||||
raise Exception('Unknown identifier: ' + input)
|
||||
s = Siamese(layer, layers, merge_mode,
|
||||
concat_axis=concat_axis,
|
||||
dot_axes=dot_axes,
|
||||
is_graph=True)
|
||||
self.namespace.add(name)
|
||||
self.nodes[name] = s
|
||||
self.node_config.append({'name': name,
|
||||
'inputs': inputs,
|
||||
'merge_mode': merge_mode,
|
||||
'concat_axis': concat_axis,
|
||||
'dot_axes': dot_axes,
|
||||
'create_output': create_output if merge_mode else False})
|
||||
if not merge_mode:
|
||||
for i in range(len(outputs)):
|
||||
sh = SiameseHead(i)
|
||||
sh.previous = s
|
||||
sh_name = outputs[i]
|
||||
sh.name = sh_name
|
||||
self.namespace.add(sh_name)
|
||||
self.nodes[sh_name] = sh
|
||||
self.node_config.append({'name': sh_name,
|
||||
'inputs': [name],
|
||||
'create_output': create_output})
|
||||
if create_output:
|
||||
self.add_output(sh_name, input=sh_name)
|
||||
|
||||
if create_output and merge_mode:
|
||||
if merge_mode == 'join':
|
||||
raise Exception('Output can not be of type OrderedDict')
|
||||
self.add_output(name, input=name)
|
||||
|
||||
def add_output(self, name, input=None, inputs=[],
|
||||
merge_mode='concat', concat_axis=-1, dot_axes=-1):
|
||||
'''Add an output to the graph.
|
||||
|
||||
This output can merge several node outputs into a single output.
|
||||
|
||||
# Arguments
|
||||
name: name of the output.
|
||||
input: when connecting the layer to a single input,
|
||||
this is the name of the incoming node.
|
||||
inputs: when connecting the layer to multiple inputs,
|
||||
this is a list of names of incoming nodes.
|
||||
merge_mode: one of {concat, sum, dot, ave, mul}
|
||||
concat_axis: when `merge_mode=='concat'`, this is the
|
||||
input concatenation axis.
|
||||
dot_axes: when `merge_mode='dot'`, this is the contraction axes
|
||||
specification; see the `Merge layer for details.
|
||||
'''
|
||||
if name in self.output_order:
|
||||
raise Exception('Duplicate output identifier: ' + name)
|
||||
if input:
|
||||
if input not in self.namespace:
|
||||
raise Exception('Unknown node/input identifier: ' + input)
|
||||
if input in self.nodes:
|
||||
self.outputs[name] = self.nodes[input]
|
||||
elif input in self.inputs:
|
||||
self.outputs[name] = self.inputs[input]
|
||||
if inputs:
|
||||
to_merge = []
|
||||
for n in inputs:
|
||||
if n not in self.nodes:
|
||||
raise Exception('Unknown identifier: ' + n)
|
||||
to_merge.append(self.nodes[n])
|
||||
merge = Merge(to_merge, mode=merge_mode,
|
||||
concat_axis=concat_axis, dot_axes=dot_axes)
|
||||
self.outputs[name] = merge
|
||||
|
||||
self.output_order.append(name)
|
||||
self.output_config.append({'name': name,
|
||||
'input': input,
|
||||
'inputs': inputs,
|
||||
'merge_mode': merge_mode,
|
||||
'concat_axis': concat_axis,
|
||||
'dot_axes': dot_axes})
|
||||
|
||||
def get_config(self):
|
||||
return {'name': self.__class__.__name__,
|
||||
'input_config': self.input_config,
|
||||
'node_config': self.node_config,
|
||||
'output_config': self.output_config,
|
||||
'input_order': self.input_order,
|
||||
'output_order': self.output_order,
|
||||
'nodes': dict([(c['name'], self.nodes[c['name']].get_config()) for c in self.node_config])}
|
||||
|
||||
def count_params(self):
|
||||
return sum([layer.count_params() for layer in self.nodes.values()])
|
||||
|
||||
def get_weights(self):
|
||||
weights = []
|
||||
for layer in self.nodes.values():
|
||||
weights += layer.get_weights()
|
||||
return weights
|
||||
|
||||
def set_weights(self, weights):
|
||||
for layer in self.nodes.values():
|
||||
nb_param = len(layer.get_weights())
|
||||
layer.set_weights(weights[:nb_param])
|
||||
weights = weights[nb_param:]
|
||||
+744
-640
Diferenças do arquivo suprimidas por serem muito extensas
Carregar Diff
+747
-1676
Diferenças do arquivo suprimidas por serem muito extensas
Carregar Diff
@@ -2,7 +2,7 @@ from __future__ import absolute_import
|
||||
|
||||
from .. import backend as K
|
||||
from .. import initializations, regularizers, constraints
|
||||
from ..layers.core import Layer
|
||||
from ..engine import Layer
|
||||
|
||||
|
||||
class Embedding(Layer):
|
||||
@@ -11,21 +11,31 @@ class Embedding(Layer):
|
||||
|
||||
This layer can only be used as the first layer in a model.
|
||||
|
||||
# Input shape
|
||||
2D tensor with shape: `(nb_samples, sequence_length)`.
|
||||
# Example
|
||||
|
||||
# Output shape
|
||||
3D tensor with shape: `(nb_samples, sequence_length, output_dim)`.
|
||||
```python
|
||||
model = Sequential()
|
||||
model.add(Embedding(1000, 64, input_length=10))
|
||||
# the model will take as input an integer matrix of size (batch, input_length).
|
||||
# the largest integer (i.e. word index) in the input should be no larger than 999 (vocabulary size).
|
||||
# now model.output_shape == (None, 10, 64), where None is the batch dimension.
|
||||
|
||||
input_array = np.random.randint(1000, size=(32, 10))
|
||||
|
||||
model.compile('rmsprop', 'mse')
|
||||
output_array = model.predict(input_array)
|
||||
assert output_array.shape == (32, 10, 64)
|
||||
```
|
||||
|
||||
# Arguments
|
||||
input_dim: int >= 0. Size of the vocabulary, ie.
|
||||
input_dim: int > 0. Size of the vocabulary, ie.
|
||||
1 + maximum integer index occurring in the input data.
|
||||
output_dim: int >= 0. Dimension of the dense embedding.
|
||||
init: name of initialization function for the weights
|
||||
of the layer (see: [initializations](../initializations.md)),
|
||||
or alternatively, Theano function to use for weights initialization.
|
||||
This parameter is only relevant if you don't pass a `weights` argument.
|
||||
weights: list of numpy arrays to set as initial weights.
|
||||
weights: list of Numpy arrays to set as initial weights.
|
||||
The list should have 1 element, of shape `(input_dim, output_dim)`.
|
||||
W_regularizer: instance of the [regularizers](../regularizers.md) module
|
||||
(eg. L1 or L2 regularization), applied to the embedding matrix.
|
||||
@@ -36,12 +46,20 @@ class Embedding(Layer):
|
||||
This is useful for [recurrent layers](recurrent.md) which may take
|
||||
variable length input. If this is `True` then all subsequent layers
|
||||
in the model need to support masking or an exception will be raised.
|
||||
If mask_zero is set to True, as a consequence, index 0 cannot be
|
||||
used in the vocabulary (input_dim should equal |vocabulary| + 2).
|
||||
input_length: Length of input sequences, when it is constant.
|
||||
This argument is required if you are going to connect
|
||||
`Flatten` then `Dense` layers upstream
|
||||
(without it, the shape of the dense outputs cannot be computed).
|
||||
dropout: float between 0 and 1. Fraction of the embeddings to drop.
|
||||
|
||||
# Input shape
|
||||
2D tensor with shape: `(nb_samples, sequence_length)`.
|
||||
|
||||
# Output shape
|
||||
3D tensor with shape: `(nb_samples, sequence_length, output_dim)`.
|
||||
|
||||
# References
|
||||
- [A Theoretically Grounded Application of Dropout in Recurrent Neural Networks](http://arxiv.org/abs/1512.05287)
|
||||
'''
|
||||
@@ -61,21 +79,26 @@ class Embedding(Layer):
|
||||
self.dropout = dropout
|
||||
|
||||
self.W_constraint = constraints.get(W_constraint)
|
||||
self.constraints = [self.W_constraint]
|
||||
|
||||
self.W_regularizer = regularizers.get(W_regularizer)
|
||||
self.activity_regularizer = regularizers.get(activity_regularizer)
|
||||
|
||||
if 0. < self.dropout < 1.:
|
||||
self.uses_learning_phase = True
|
||||
self.initial_weights = weights
|
||||
kwargs['input_shape'] = (self.input_dim,)
|
||||
kwargs['input_shape'] = (self.input_length,)
|
||||
kwargs['input_dtype'] = 'int32'
|
||||
super(Embedding, self).__init__(**kwargs)
|
||||
|
||||
def build(self):
|
||||
self.input = K.placeholder(shape=(self.input_shape[0], self.input_length),
|
||||
dtype='int32')
|
||||
def build(self, input_shape):
|
||||
self.W = self.init((self.input_dim, self.output_dim),
|
||||
name='{}_W'.format(self.name))
|
||||
self.trainable_weights = [self.W]
|
||||
|
||||
self.constraints = {}
|
||||
if self.W_constraint:
|
||||
self.constraints[self.W] = self.W_constraint
|
||||
|
||||
self.regularizers = []
|
||||
if self.W_regularizer:
|
||||
self.W_regularizer.set_param(self.W)
|
||||
@@ -88,38 +111,41 @@ class Embedding(Layer):
|
||||
if self.initial_weights is not None:
|
||||
self.set_weights(self.initial_weights)
|
||||
|
||||
def get_output_mask(self, train=None):
|
||||
X = self.get_input(train)
|
||||
def compute_mask(self, x, mask=None):
|
||||
if not self.mask_zero:
|
||||
return None
|
||||
else:
|
||||
return K.not_equal(X, 0)
|
||||
return K.not_equal(x, 0)
|
||||
|
||||
@property
|
||||
def output_shape(self):
|
||||
return (self.input_shape[0], self.input_length, self.output_dim)
|
||||
|
||||
def get_output(self, train=False):
|
||||
X = self.get_input(train)
|
||||
retain_p = 1. - self.dropout
|
||||
if train and self.dropout > 0:
|
||||
B = K.random_binomial((self.input_dim,), p=retain_p)
|
||||
def get_output_shape_for(self, input_shape):
|
||||
if not self.input_length:
|
||||
input_length = input_shape[1]
|
||||
else:
|
||||
B = K.ones((self.input_dim)) * retain_p
|
||||
# we zero-out rows of W at random
|
||||
out = K.gather(self.W * K.expand_dims(B), X)
|
||||
input_length = self.input_length
|
||||
return (input_shape[0], input_length, self.output_dim)
|
||||
|
||||
def call(self, x, mask=None):
|
||||
if K.dtype(x) != 'int32':
|
||||
x = K.cast(x, 'int32')
|
||||
if 0. < self.dropout < 1.:
|
||||
retain_p = 1. - self.dropout
|
||||
B = K.random_binomial((self.input_dim,), p=retain_p) * (1. / retain_p)
|
||||
B = K.expand_dims(B)
|
||||
W = K.in_train_phase(self.W * B, self.W)
|
||||
else:
|
||||
W = self.W
|
||||
out = K.gather(W, x)
|
||||
return out
|
||||
|
||||
def get_config(self):
|
||||
config = {"name": self.__class__.__name__,
|
||||
"input_dim": self.input_dim,
|
||||
"output_dim": self.output_dim,
|
||||
"init": self.init.__name__,
|
||||
"input_length": self.input_length,
|
||||
"mask_zero": self.mask_zero,
|
||||
"activity_regularizer": self.activity_regularizer.get_config() if self.activity_regularizer else None,
|
||||
"W_regularizer": self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
"W_constraint": self.W_constraint.get_config() if self.W_constraint else None,
|
||||
"dropout": self.dropout}
|
||||
config = {'input_dim': self.input_dim,
|
||||
'output_dim': self.output_dim,
|
||||
'init': self.init.__name__,
|
||||
'input_length': self.input_length,
|
||||
'mask_zero': self.mask_zero,
|
||||
'activity_regularizer': self.activity_regularizer.get_config() if self.activity_regularizer else None,
|
||||
'W_regularizer': self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
'W_constraint': self.W_constraint.get_config() if self.W_constraint else None,
|
||||
'dropout': self.dropout}
|
||||
base_config = super(Embedding, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
@@ -0,0 +1,423 @@
|
||||
# -*- coding: utf-8 -*-
|
||||
from __future__ import absolute_import
|
||||
|
||||
from keras import backend as K
|
||||
from keras.layers import activations, initializations, regularizers, constraints
|
||||
from keras.engine import Layer, InputSpec
|
||||
from ..utils.np_utils import conv_output_length
|
||||
|
||||
|
||||
class LocallyConnected1D(Layer):
|
||||
'''LocallyConnected1D layer works almost the same as Convolution1D layer,
|
||||
except that weights are unshared, that is, a different set of filters is
|
||||
applied at each different patch of the input. When using this layer as the
|
||||
first layer in a model, either provide the keyword argument `input_dim`
|
||||
(int, e.g. 128 for sequences of 128-dimensional vectors), or `input_shape`
|
||||
(tuple of integers, e.g. (10, 128) for sequences of 10 vectors of
|
||||
128-dimensional vectors). Also, you will need to fix shape of the previous
|
||||
layer, since the weights can only be defined with determined output shape.
|
||||
|
||||
# Example
|
||||
```python
|
||||
# apply a unshared weight convolution 1d of length 3 to a sequence with
|
||||
# 10 timesteps, with 64 output filters
|
||||
model = Sequential()
|
||||
model.add(LocallyConnected1D(64, 3, input_shape=(10, 32)))
|
||||
# now model.output_shape == (None, 8, 64)
|
||||
# add a new conv1d on top
|
||||
model.add(LocallyConnected1D(32, 3))
|
||||
# now model.output_shape == (None, 6, 32)
|
||||
```
|
||||
# Arguments
|
||||
nb_filter: Dimensionality of the output.
|
||||
filter_length: The extension (spatial or temporal) of each filter.
|
||||
init: name of initialization function for the weights of the layer
|
||||
(see [initializations](../initializations.md)),
|
||||
or alternatively, Theano function to use for weights initialization.
|
||||
This parameter is only relevant if you don't pass a `weights` argument.
|
||||
activation: name of activation function to use
|
||||
(see [activations](../activations.md)),
|
||||
or alternatively, elementwise Theano function.
|
||||
If you don't specify anything, no activation is applied
|
||||
(ie. "linear" activation: a(x) = x).
|
||||
weights: list of numpy arrays to set as initial weights.
|
||||
border_mode: Only support 'valid'. Please make good use of
|
||||
ZeroPadding1D to achieve same output length.
|
||||
subsample_length: factor by which to subsample output.
|
||||
W_regularizer: instance of [WeightRegularizer](../regularizers.md)
|
||||
(eg. L1 or L2 regularization), applied to the main weights matrix.
|
||||
b_regularizer: instance of [WeightRegularizer](../regularizers.md),
|
||||
applied to the bias.
|
||||
activity_regularizer: instance of [ActivityRegularizer](../regularizers.md),
|
||||
applied to the network output.
|
||||
W_constraint: instance of the [constraints](../constraints.md) module
|
||||
(eg. maxnorm, nonneg), applied to the main weights matrix.
|
||||
b_constraint: instance of the [constraints](../constraints.md) module,
|
||||
applied to the bias.
|
||||
bias: whether to include a bias (i.e. make the layer affine rather than linear).
|
||||
input_dim: Number of channels/dimensions in the input.
|
||||
Either this argument or the keyword argument `input_shape`must be
|
||||
provided when using this layer as the first layer in a model.
|
||||
input_length: Length of input sequences, when it is constant.
|
||||
This argument is required if you are going to connect
|
||||
`Flatten` then `Dense` layers upstream
|
||||
(without it, the shape of the dense outputs cannot be computed).
|
||||
# Input shape
|
||||
3D tensor with shape: `(samples, steps, input_dim)`.
|
||||
# Output shape
|
||||
3D tensor with shape: `(samples, new_steps, nb_filter)`.
|
||||
`steps` value might have changed due to padding.
|
||||
'''
|
||||
def __init__(self, nb_filter, filter_length,
|
||||
init='uniform', activation='linear', weights=None,
|
||||
border_mode='valid', subsample_length=1,
|
||||
W_regularizer=None, b_regularizer=None, activity_regularizer=None,
|
||||
W_constraint=None, b_constraint=None,
|
||||
bias=True, input_dim=None, input_length=None, **kwargs):
|
||||
if border_mode != 'valid':
|
||||
raise Exception('Invalid border mode for LocallyConnected1D '
|
||||
'(only "valid" is supported):', border_mode)
|
||||
self.nb_filter = nb_filter
|
||||
self.filter_length = filter_length
|
||||
self.init = initializations.get(init, dim_ordering='th')
|
||||
self.activation = activations.get(activation)
|
||||
|
||||
self.border_mode = border_mode
|
||||
self.subsample_length = subsample_length
|
||||
|
||||
self.W_regularizer = regularizers.get(W_regularizer)
|
||||
self.b_regularizer = regularizers.get(b_regularizer)
|
||||
self.activity_regularizer = regularizers.get(activity_regularizer)
|
||||
|
||||
self.W_constraint = constraints.get(W_constraint)
|
||||
self.b_constraint = constraints.get(b_constraint)
|
||||
|
||||
self.bias = bias
|
||||
self.input_spec = [InputSpec(ndim=3)]
|
||||
self.initial_weights = weights
|
||||
self.input_dim = input_dim
|
||||
self.input_length = input_length
|
||||
if self.input_dim:
|
||||
kwargs['input_shape'] = (self.input_length, self.input_dim)
|
||||
super(LocallyConnected1D, self).__init__(**kwargs)
|
||||
|
||||
def build(self, input_shape):
|
||||
input_dim = input_shape[2]
|
||||
_, output_length, nb_filter = self.get_output_shape_for(input_shape)
|
||||
|
||||
self.W_shape = (output_length, self.filter_length * input_dim, nb_filter)
|
||||
self.W = self.init(self.W_shape, name='{}_W'.format(self.name))
|
||||
if self.bias:
|
||||
self.b = K.zeros((output_length, self.nb_filter), name='{}_b'.format(self.name))
|
||||
self.trainable_weights = [self.W, self.b]
|
||||
else:
|
||||
self.trainable_weights = [self.W]
|
||||
|
||||
self.regularizers = []
|
||||
if self.W_regularizer:
|
||||
self.W_regularizer.set_param(self.W)
|
||||
self.regularizers.append(self.W_regularizer)
|
||||
if self.b_regularizer:
|
||||
self.b_regularizer.set_param(self.b)
|
||||
self.regularizers.append(self.b_regularizer)
|
||||
if self.activity_regularizer:
|
||||
self.activity_regularizer.set_layer(self)
|
||||
self.regularizers.append(self.activity_regularizer)
|
||||
|
||||
self.constraints = {}
|
||||
if self.W_constraint:
|
||||
self.constraints[self.W] = self.W_constraint
|
||||
if self.b_constraint:
|
||||
self.constraints[self.b] = self.b_constraint
|
||||
|
||||
if self.initial_weights is not None:
|
||||
self.set_weights(self.initial_weights)
|
||||
del self.initial_weights
|
||||
|
||||
def get_output_shape_for(self, input_shape):
|
||||
length = conv_output_length(input_shape[1],
|
||||
self.filter_length,
|
||||
self.border_mode,
|
||||
self.subsample_length)
|
||||
return (input_shape[0], length, self.nb_filter)
|
||||
|
||||
def call(self, x, mask=None):
|
||||
stride = self.subsample_length
|
||||
output_length, feature_dim, nb_filter = self.W_shape
|
||||
|
||||
xs = []
|
||||
for i in range(output_length):
|
||||
slice_length = slice(i * stride, i * stride + self.filter_length)
|
||||
xs.append(K.reshape(x[:, slice_length, :], (1, -1, feature_dim)))
|
||||
x_aggregate = K.concatenate(xs, axis=0)
|
||||
# (output_length, batch_size, nb_filter)
|
||||
output = K.batch_dot(x_aggregate, self.W)
|
||||
output = K.permute_dimensions(output, (1, 0, 2))
|
||||
|
||||
if self.bias:
|
||||
output += K.reshape(self.b, (1, output_length, nb_filter))
|
||||
|
||||
output = self.activation(output)
|
||||
return output
|
||||
|
||||
def get_config(self):
|
||||
config = {'nb_filter': self.nb_filter,
|
||||
'filter_length': self.filter_length,
|
||||
'init': self.init.__name__,
|
||||
'activation': self.activation.__name__,
|
||||
'border_mode': self.border_mode,
|
||||
'subsample_length': self.subsample_length,
|
||||
'W_regularizer': self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
'b_regularizer': self.b_regularizer.get_config() if self.b_regularizer else None,
|
||||
'activity_regularizer': self.activity_regularizer.get_config() if self.activity_regularizer else None,
|
||||
'W_constraint': self.W_constraint.get_config() if self.W_constraint else None,
|
||||
'b_constraint': self.b_constraint.get_config() if self.b_constraint else None,
|
||||
'bias': self.bias,
|
||||
'input_dim': self.input_dim,
|
||||
'input_length': self.input_length}
|
||||
base_config = super(LocallyConnected1D, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class LocallyConnected2D(Layer):
|
||||
'''LocallyConnected2D layer works almost the same as Convolution2D layer,
|
||||
except that weights are unshared, that is, a different set of filters is
|
||||
applied at each different patch of the input. When using this layer as the
|
||||
first layer in a model, provide the keyword argument `input_shape` (tuple
|
||||
of integers, does not include the sample axis), e.g.
|
||||
`input_shape=(3, 128, 128)` for 128x128 RGB pictures. Also, you will need
|
||||
to fix shape of the previous layer, since the weights can only be defined
|
||||
with determined output shape.
|
||||
|
||||
# Examples
|
||||
```python
|
||||
# apply a 3x3 unshared weights convolution with 64 output filters on a 32x32 image:
|
||||
model = Sequential()
|
||||
model.add(LocallyConnected2D(64, 3, 3, input_shape=(3, 32, 32)))
|
||||
# now model.output_shape == (None, 64, 30, 30)
|
||||
# notice that this layer will consume (30*30)*(3*3*3*64) + (30*30)*64 parameters
|
||||
|
||||
# add a 3x3 unshared weights convolution on top, with 32 output filters:
|
||||
model.add(LocallyConnected2D(32, 3, 3))
|
||||
# now model.output_shape == (None, 32, 28, 28)
|
||||
```
|
||||
|
||||
# Arguments
|
||||
nb_filter: Number of convolution filters to use.
|
||||
nb_row: Number of rows in the convolution kernel.
|
||||
nb_col: Number of columns in the convolution kernel.
|
||||
init: name of initialization function for the weights of the layer
|
||||
(see [initializations](../initializations.md)), or alternatively,
|
||||
Theano function to use for weights initialization.
|
||||
This parameter is only relevant if you don't pass
|
||||
a `weights` argument.
|
||||
activation: name of activation function to use
|
||||
(see [activations](../activations.md)),
|
||||
or alternatively, elementwise Theano function.
|
||||
If you don't specify anything, no activation is applied
|
||||
(ie. "linear" activation: a(x) = x).
|
||||
weights: list of numpy arrays to set as initial weights.
|
||||
border_mode: Only support 'valid'. Please make good use of
|
||||
ZeroPadding2D to achieve same output shape.
|
||||
subsample: tuple of length 2. Factor by which to subsample output.
|
||||
Also called strides elsewhere.
|
||||
W_regularizer: instance of [WeightRegularizer](../regularizers.md)
|
||||
(eg. L1 or L2 regularization), applied to the main weights matrix.
|
||||
b_regularizer: instance of [WeightRegularizer](../regularizers.md),
|
||||
applied to the bias.
|
||||
activity_regularizer: instance of [ActivityRegularizer](../regularizers.md),
|
||||
applied to the network output.
|
||||
W_constraint: instance of the [constraints](../constraints.md) module
|
||||
(eg. maxnorm, nonneg), applied to the main weights matrix.
|
||||
b_constraint: instance of the [constraints](../constraints.md) module,
|
||||
applied to the bias.
|
||||
dim_ordering: 'th' or 'tf'. In 'th' mode, the channels dimension
|
||||
(the depth) is at index 1, in 'tf' mode is it at index 3.
|
||||
bias: whether to include a bias (i.e. make the layer affine rather than linear).
|
||||
|
||||
# Input shape
|
||||
4D tensor with shape:
|
||||
`(samples, channels, rows, cols)` if dim_ordering='th'
|
||||
or 4D tensor with shape:
|
||||
`(samples, rows, cols, channels)` if dim_ordering='tf'.
|
||||
|
||||
# Output shape
|
||||
4D tensor with shape:
|
||||
`(samples, nb_filter, new_rows, new_cols)` if dim_ordering='th'
|
||||
or 4D tensor with shape:
|
||||
`(samples, new_rows, new_cols, nb_filter)` if dim_ordering='tf'.
|
||||
`rows` and `cols` values might have changed due to padding.
|
||||
'''
|
||||
def __init__(self, nb_filter, nb_row, nb_col,
|
||||
init='glorot_uniform', activation='linear', weights=None,
|
||||
border_mode='valid', subsample=(1, 1),
|
||||
dim_ordering='default',
|
||||
W_regularizer=None, b_regularizer=None, activity_regularizer=None,
|
||||
W_constraint=None, b_constraint=None,
|
||||
bias=True, **kwargs):
|
||||
if dim_ordering == 'default':
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
if border_mode != 'valid':
|
||||
raise Exception('Invalid border mode for LocallyConnected2D '
|
||||
'(only "valid" is supported):', border_mode)
|
||||
self.nb_filter = nb_filter
|
||||
self.nb_row = nb_row
|
||||
self.nb_col = nb_col
|
||||
self.init = initializations.get(init, dim_ordering=dim_ordering)
|
||||
self.activation = activations.get(activation)
|
||||
|
||||
self.border_mode = border_mode
|
||||
self.subsample = tuple(subsample)
|
||||
assert dim_ordering in {'tf', 'th'}, 'dim_ordering must be in {tf, th}'
|
||||
self.dim_ordering = dim_ordering
|
||||
|
||||
self.W_regularizer = regularizers.get(W_regularizer)
|
||||
self.b_regularizer = regularizers.get(b_regularizer)
|
||||
self.activity_regularizer = regularizers.get(activity_regularizer)
|
||||
|
||||
self.W_constraint = constraints.get(W_constraint)
|
||||
self.b_constraint = constraints.get(b_constraint)
|
||||
|
||||
self.bias = bias
|
||||
self.input_spec = [InputSpec(ndim=4)]
|
||||
self.initial_weights = weights
|
||||
super(LocallyConnected2D, self).__init__(**kwargs)
|
||||
|
||||
def build(self, input_shape):
|
||||
output_shape = self.get_output_shape_for(input_shape)
|
||||
if self.dim_ordering == 'th':
|
||||
_, nb_filter, output_row, output_col = output_shape
|
||||
input_filter = input_shape[1]
|
||||
elif self.dim_ordering == 'tf':
|
||||
_, output_row, output_col, nb_filter = output_shape
|
||||
input_filter = input_shape[3]
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + self.dim_ordering)
|
||||
|
||||
self.output_row = output_row
|
||||
self.output_col = output_col
|
||||
self.W_shape = (output_row * output_col, self.nb_row * self.nb_col * input_filter, nb_filter)
|
||||
self.W = self.init(self.W_shape, name='{}_W'.format(self.name))
|
||||
|
||||
if self.bias:
|
||||
self.b = K.zeros((output_row, output_col, nb_filter), name='{}_b'.format(self.name))
|
||||
self.trainable_weights = [self.W, self.b]
|
||||
else:
|
||||
self.trainable_weights = [self.W]
|
||||
|
||||
self.regularizers = []
|
||||
if self.W_regularizer:
|
||||
self.W_regularizer.set_param(self.W)
|
||||
self.regularizers.append(self.W_regularizer)
|
||||
if self.bias and self.b_regularizer:
|
||||
self.b_regularizer.set_param(self.b)
|
||||
self.regularizers.append(self.b_regularizer)
|
||||
if self.activity_regularizer:
|
||||
self.activity_regularizer.set_layer(self)
|
||||
self.regularizers.append(self.activity_regularizer)
|
||||
|
||||
self.constraints = {}
|
||||
if self.W_constraint:
|
||||
self.constraints[self.W] = self.W_constraint
|
||||
if self.bias and self.b_constraint:
|
||||
self.constraints[self.b] = self.b_constraint
|
||||
|
||||
if self.initial_weights is not None:
|
||||
self.set_weights(self.initial_weights)
|
||||
del self.initial_weights
|
||||
|
||||
def get_output_shape_for(self, input_shape):
|
||||
if self.dim_ordering == 'th':
|
||||
rows = input_shape[2]
|
||||
cols = input_shape[3]
|
||||
elif self.dim_ordering == 'tf':
|
||||
rows = input_shape[1]
|
||||
cols = input_shape[2]
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + self.dim_ordering)
|
||||
|
||||
rows = conv_output_length(rows, self.nb_row,
|
||||
self.border_mode, self.subsample[0])
|
||||
cols = conv_output_length(cols, self.nb_col,
|
||||
self.border_mode, self.subsample[1])
|
||||
|
||||
if self.dim_ordering == 'th':
|
||||
return (input_shape[0], self.nb_filter, rows, cols)
|
||||
elif self.dim_ordering == 'tf':
|
||||
return (input_shape[0], rows, cols, self.nb_filter)
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + self.dim_ordering)
|
||||
|
||||
def call(self, x, mask=None):
|
||||
stride_row, stride_col = self.subsample
|
||||
_, feature_dim, nb_filter = self.W_shape
|
||||
|
||||
if self.dim_ordering == 'th':
|
||||
if K._backend == 'theano':
|
||||
output = []
|
||||
for i in range(self.output_row):
|
||||
for j in range(self.output_col):
|
||||
slice_row = slice(i * stride_row,
|
||||
i * stride_row + self.nb_row)
|
||||
slice_col = slice(j * stride_col,
|
||||
j * stride_col + self.nb_col)
|
||||
x_flatten = K.reshape(x[:, :, slice_row, slice_col], (1, -1, feature_dim))
|
||||
output.append(K.dot(x_flatten, self.W[i * self.output_col + j, :, :]))
|
||||
output = K.concatenate(output, axis=0)
|
||||
else:
|
||||
xs = []
|
||||
for i in range(self.output_row):
|
||||
for j in range(self.output_col):
|
||||
slice_row = slice(i * stride_row,
|
||||
i * stride_row + self.nb_row)
|
||||
slice_col = slice(j * stride_col,
|
||||
j * stride_col + self.nb_col)
|
||||
xs.append(K.reshape(x[:, :, slice_row, slice_col], (1, -1, feature_dim)))
|
||||
x_aggregate = K.concatenate(xs, axis=0)
|
||||
output = K.batch_dot(x_aggregate, self.W)
|
||||
output = K.reshape(output, (self.output_row, self.output_col, -1, nb_filter))
|
||||
output = K.permute_dimensions(output, (2, 3, 0, 1))
|
||||
elif self.dim_ordering == 'tf':
|
||||
xs = []
|
||||
for i in range(self.output_row):
|
||||
for j in range(self.output_col):
|
||||
slice_row = slice(i * stride_row,
|
||||
i * stride_row + self.nb_row)
|
||||
slice_col = slice(j * stride_col,
|
||||
j * stride_col + self.nb_col)
|
||||
xs.append(K.reshape(x[:, slice_row, slice_col, :], (1, -1, feature_dim)))
|
||||
x_aggregate = K.concatenate(xs, axis=0)
|
||||
output = K.batch_dot(x_aggregate, self.W)
|
||||
output = K.reshape(output, (self.output_row, self.output_col, -1, nb_filter))
|
||||
output = K.permute_dimensions(output, (2, 0, 1, 3))
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + self.dim_ordering)
|
||||
|
||||
if self.bias:
|
||||
if self.dim_ordering == 'th':
|
||||
output += K.reshape(self.b, (1, nb_filter, self.output_row, self.output_col))
|
||||
elif self.dim_ordering == 'tf':
|
||||
output += K.reshape(self.b, (1, self.output_row, self.output_col, nb_filter))
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + self.dim_ordering)
|
||||
|
||||
output = self.activation(output)
|
||||
return output
|
||||
|
||||
def get_config(self):
|
||||
config = {'nb_filter': self.nb_filter,
|
||||
'nb_row': self.nb_row,
|
||||
'nb_col': self.nb_col,
|
||||
'init': self.init.__name__,
|
||||
'activation': self.activation.__name__,
|
||||
'border_mode': self.border_mode,
|
||||
'subsample': self.subsample,
|
||||
'dim_ordering': self.dim_ordering,
|
||||
'W_regularizer': self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
'b_regularizer': self.b_regularizer.get_config() if self.b_regularizer else None,
|
||||
'activity_regularizer': self.activity_regularizer.get_config() if self.activity_regularizer else None,
|
||||
'W_constraint': self.W_constraint.get_config() if self.W_constraint else None,
|
||||
'b_constraint': self.b_constraint.get_config() if self.b_constraint else None,
|
||||
'bias': self.bias}
|
||||
base_config = super(LocallyConnected2D, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
+54
-47
@@ -1,10 +1,11 @@
|
||||
from __future__ import absolute_import
|
||||
from .core import MaskedLayer
|
||||
from ..engine import Layer
|
||||
from .. import backend as K
|
||||
import numpy as np
|
||||
|
||||
|
||||
class GaussianNoise(MaskedLayer):
|
||||
'''Apply to the input an additive zero-centred gaussian noise with
|
||||
class GaussianNoise(Layer):
|
||||
'''Apply to the input an additive zero-centered Gaussian noise with
|
||||
standard deviation `sigma`. This is useful to mitigate overfitting
|
||||
(you could see it as a kind of random data augmentation).
|
||||
Gaussian Noise (GS) is a natural choice as corruption process
|
||||
@@ -12,6 +13,44 @@ class GaussianNoise(MaskedLayer):
|
||||
|
||||
As it is a regularization layer, it is only active at training time.
|
||||
|
||||
# Arguments
|
||||
sigma: float, standard deviation of the noise distribution.
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
(tuple of integers, does not include the samples axis)
|
||||
when using this layer as the first layer in a model.
|
||||
|
||||
# Output shape
|
||||
Same shape as input.
|
||||
'''
|
||||
def __init__(self, sigma, **kwargs):
|
||||
self.supports_masking = True
|
||||
self.sigma = sigma
|
||||
self.uses_learning_phase = True
|
||||
super(GaussianNoise, self).__init__(**kwargs)
|
||||
|
||||
def call(self, x, mask=None):
|
||||
noise_x = x + K.random_normal(shape=K.shape(x),
|
||||
mean=0.,
|
||||
std=self.sigma)
|
||||
return K.in_train_phase(noise_x, x)
|
||||
|
||||
def get_config(self):
|
||||
config = {'sigma': self.sigma}
|
||||
base_config = super(GaussianNoise, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class GaussianDropout(Layer):
|
||||
'''Apply to the input an multiplicative one-centered Gaussian noise
|
||||
with standard deviation `sqrt(p/(1-p))`.
|
||||
|
||||
As it is a regularization layer, it is only active at training time.
|
||||
|
||||
# Arguments
|
||||
p: float, drop probability (as with `Dropout`).
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
(tuple of integers, does not include the samples axis)
|
||||
@@ -20,56 +59,24 @@ class GaussianNoise(MaskedLayer):
|
||||
# Output shape
|
||||
Same shape as input.
|
||||
|
||||
# Arguments
|
||||
sigma: float, standard deviation of the noise distribution.
|
||||
'''
|
||||
def __init__(self, sigma, **kwargs):
|
||||
super(GaussianNoise, self).__init__(**kwargs)
|
||||
self.sigma = sigma
|
||||
|
||||
def get_output(self, train=False):
|
||||
X = self.get_input(train)
|
||||
if not train or self.sigma == 0:
|
||||
return X
|
||||
else:
|
||||
return X + K.random_normal(shape=K.shape(X),
|
||||
mean=0.,
|
||||
std=self.sigma)
|
||||
|
||||
def get_config(self):
|
||||
config = {"name": self.__class__.__name__,
|
||||
"sigma": self.sigma}
|
||||
base_config = super(GaussianNoise, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class GaussianDropout(MaskedLayer):
|
||||
'''Apply to the input an multiplicative one-centred gaussian noise
|
||||
with standard deviation `sqrt(p/(1-p))`.
|
||||
|
||||
As it is a regularization layer, it is only active at training time.
|
||||
|
||||
# Arguments
|
||||
p: float, drop probability (as with `Dropout`).
|
||||
|
||||
# References:
|
||||
# References
|
||||
[Dropout: A Simple Way to Prevent Neural Networks from Overfitting Srivastava, Hinton, et al. 2014](http://www.cs.toronto.edu/~rsalakhu/papers/srivastava14a.pdf)
|
||||
'''
|
||||
def __init__(self, p, **kwargs):
|
||||
super(GaussianDropout, self).__init__(**kwargs)
|
||||
self.supports_masking = True
|
||||
self.p = p
|
||||
if 0 < p < 1:
|
||||
self.uses_learning_phase = True
|
||||
super(GaussianDropout, self).__init__(**kwargs)
|
||||
|
||||
def get_output(self, train):
|
||||
X = self.get_input(train)
|
||||
if train:
|
||||
# self.p refers to drop probability rather than
|
||||
# retain probability (as in paper), for consistency
|
||||
X *= K.random_normal(shape=K.shape(X), mean=1.0,
|
||||
std=K.sqrt(self.p / (1.0 - self.p)))
|
||||
return X
|
||||
def call(self, x, mask=None):
|
||||
if 0 < self.p < 1:
|
||||
noise_x = x * K.random_normal(shape=K.shape(x), mean=1.0,
|
||||
std=np.sqrt(self.p / (1.0 - self.p)))
|
||||
return K.in_train_phase(noise_x, x)
|
||||
return x
|
||||
|
||||
def get_config(self):
|
||||
config = {"name": self.__class__.__name__,
|
||||
"p": self.p}
|
||||
config = {'p': self.p}
|
||||
base_config = super(GaussianDropout, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
@@ -1,4 +1,4 @@
|
||||
from ..layers.core import Layer
|
||||
from ..engine import Layer, InputSpec
|
||||
from .. import initializations
|
||||
from .. import backend as K
|
||||
|
||||
@@ -8,17 +8,9 @@ class BatchNormalization(Layer):
|
||||
i.e. applies a transformation that maintains the mean activation
|
||||
close to 0 and the activation standard deviation close to 1.
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
(tuple of integers, does not include the samples axis)
|
||||
when using this layer as the first layer in a model.
|
||||
|
||||
# Output shape
|
||||
Same shape as input.
|
||||
|
||||
# Arguments
|
||||
epsilon: small float > 0. Fuzz parameter.
|
||||
mode: integer, 0 or 1.
|
||||
mode: integer, 0, 1 or 2.
|
||||
- 0: feature-wise normalization.
|
||||
Each feature map in the input will
|
||||
be normalized separately. The axis on which
|
||||
@@ -27,7 +19,13 @@ class BatchNormalization(Layer):
|
||||
using Theano conventions (samples, channels, rows, cols)
|
||||
then you should set `axis` to `1` to normalize along
|
||||
the channels axis.
|
||||
During training we use per-batch statistics to normalize
|
||||
the data, and during testing we use running averages
|
||||
computed during the training phase.
|
||||
- 1: sample-wise normalization. This mode assumes a 2D input.
|
||||
- 2: feature-wise normalization, like mode 0, but
|
||||
using per-batch statistics to normalize the data during both
|
||||
testing and training.
|
||||
axis: integer, axis along which to normalize in mode 0. For instance,
|
||||
if your input tensor has shape (samples, channels, rows, cols),
|
||||
set axis to 1 to normalize per feature map (channels axis).
|
||||
@@ -35,8 +33,9 @@ class BatchNormalization(Layer):
|
||||
exponential average of the mean and standard deviation
|
||||
of the data, for feature-wise normalization.
|
||||
weights: Initialization weights.
|
||||
List of 2 numpy arrays, with shapes:
|
||||
List of 2 Numpy arrays, with shapes:
|
||||
`[(input_shape,), (input_shape,)]`
|
||||
Note that the order of this list is [gamma, beta, mean, std]
|
||||
beta_init: name of initialization function for shift parameter
|
||||
(see [initializations](../initializations.md)), or alternatively,
|
||||
Theano/TensorFlow function to use for weights initialization.
|
||||
@@ -45,11 +44,21 @@ class BatchNormalization(Layer):
|
||||
[initializations](../initializations.md)), or alternatively,
|
||||
Theano/TensorFlow function to use for weights initialization.
|
||||
This parameter is only relevant if you don't pass a `weights` argument.
|
||||
|
||||
# Input shape
|
||||
Arbitrary. Use the keyword argument `input_shape`
|
||||
(tuple of integers, does not include the samples axis)
|
||||
when using this layer as the first layer in a model.
|
||||
|
||||
# Output shape
|
||||
Same shape as input.
|
||||
|
||||
# References
|
||||
- [Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift](http://arxiv.org/pdf/1502.03167v3.pdf)
|
||||
- [Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift](http://jmlr.org/proceedings/papers/v37/ioffe15.html)
|
||||
'''
|
||||
def __init__(self, epsilon=1e-6, mode=0, axis=-1, momentum=0.9,
|
||||
def __init__(self, epsilon=1e-6, mode=0, axis=-1, momentum=0.99,
|
||||
weights=None, beta_init='zero', gamma_init='one', **kwargs):
|
||||
self.supports_masking = True
|
||||
self.beta_init = initializations.get(beta_init)
|
||||
self.gamma_init = initializations.get(gamma_init)
|
||||
self.epsilon = epsilon
|
||||
@@ -57,10 +66,12 @@ class BatchNormalization(Layer):
|
||||
self.axis = axis
|
||||
self.momentum = momentum
|
||||
self.initial_weights = weights
|
||||
if self.mode == 0:
|
||||
self.uses_learning_phase = True
|
||||
super(BatchNormalization, self).__init__(**kwargs)
|
||||
|
||||
def build(self):
|
||||
input_shape = self.input_shape # starts with samples axis
|
||||
def build(self, input_shape):
|
||||
self.input_spec = [InputSpec(shape=input_shape)]
|
||||
shape = (input_shape[self.axis],)
|
||||
|
||||
self.gamma = self.gamma_init(shape, name='{}_gamma'.format(self.name))
|
||||
@@ -76,42 +87,72 @@ class BatchNormalization(Layer):
|
||||
if self.initial_weights is not None:
|
||||
self.set_weights(self.initial_weights)
|
||||
del self.initial_weights
|
||||
self.built = True
|
||||
self.called_with = None
|
||||
|
||||
def call(self, x, mask=None):
|
||||
if self.mode == 0 or self.mode == 2:
|
||||
assert self.built, 'Layer must be built before being called'
|
||||
input_shape = self.input_spec[0].shape
|
||||
|
||||
def get_output(self, train):
|
||||
X = self.get_input(train)
|
||||
if self.mode == 0:
|
||||
input_shape = self.input_shape
|
||||
reduction_axes = list(range(len(input_shape)))
|
||||
del reduction_axes[self.axis]
|
||||
broadcast_shape = [1] * len(input_shape)
|
||||
broadcast_shape[self.axis] = input_shape[self.axis]
|
||||
if train:
|
||||
m = K.mean(X, axis=reduction_axes)
|
||||
brodcast_m = K.reshape(m, broadcast_shape)
|
||||
std = K.mean(K.square(X - brodcast_m) + self.epsilon, axis=reduction_axes)
|
||||
std = K.sqrt(std)
|
||||
brodcast_std = K.reshape(std, broadcast_shape)
|
||||
mean_update = self.momentum * self.running_mean + (1-self.momentum) * m
|
||||
std_update = self.momentum * self.running_std + (1-self.momentum) * std
|
||||
self.updates = [(self.running_mean, mean_update),
|
||||
(self.running_std, std_update)]
|
||||
X_normed = (X - brodcast_m) / (brodcast_std + self.epsilon)
|
||||
|
||||
if self.mode == 2:
|
||||
x_normed, mean, std = K.normalize_batch_in_training(
|
||||
x, self.gamma, self.beta, reduction_axes,
|
||||
epsilon=self.epsilon)
|
||||
else:
|
||||
brodcast_m = K.reshape(self.running_mean, broadcast_shape)
|
||||
brodcast_std = K.reshape(self.running_std, broadcast_shape)
|
||||
X_normed = ((X - brodcast_m) /
|
||||
(brodcast_std + self.epsilon))
|
||||
out = K.reshape(self.gamma, broadcast_shape) * X_normed + K.reshape(self.beta, broadcast_shape)
|
||||
# mode 0
|
||||
if self.called_with not in {None, x}:
|
||||
raise Exception('You are attempting to share a '
|
||||
'same `BatchNormalization` layer across '
|
||||
'different data flows. '
|
||||
'This is not possible. '
|
||||
'You should use `mode=2` in '
|
||||
'`BatchNormalization`, which has '
|
||||
'a similar behavior but is shareable '
|
||||
'(see docs for a description of '
|
||||
'the behavior).')
|
||||
self.called_with = x
|
||||
x_normed, mean, std = K.normalize_batch_in_training(
|
||||
x, self.gamma, self.beta, reduction_axes,
|
||||
epsilon=self.epsilon)
|
||||
|
||||
self.updates = [K.moving_average_update(self.running_mean, mean, self.momentum),
|
||||
K.moving_average_update(self.running_std, std, self.momentum)]
|
||||
|
||||
if sorted(reduction_axes) == range(K.ndim(x))[:-1]:
|
||||
x_normed_running = K.batch_normalization(
|
||||
x, self.running_mean, self.running_std,
|
||||
self.beta, self.gamma,
|
||||
epsilon=self.epsilon)
|
||||
else:
|
||||
# need broadcasting
|
||||
broadcast_running_mean = K.reshape(self.running_mean, broadcast_shape)
|
||||
broadcast_running_std = K.reshape(self.running_std, broadcast_shape)
|
||||
broadcast_beta = K.reshape(self.beta, broadcast_shape)
|
||||
broadcast_gamma = K.reshape(self.gamma, broadcast_shape)
|
||||
x_normed_running = K.batch_normalization(
|
||||
x, broadcast_running_mean, broadcast_running_std,
|
||||
broadcast_beta, broadcast_gamma,
|
||||
epsilon=self.epsilon)
|
||||
|
||||
# pick the normalized form of x corresponding to the training phase
|
||||
x_normed = K.in_train_phase(x_normed, x_normed_running)
|
||||
|
||||
elif self.mode == 1:
|
||||
m = K.mean(X, axis=-1, keepdims=True)
|
||||
std = K.std(X, axis=-1, keepdims=True)
|
||||
X_normed = (X - m) / (std + self.epsilon)
|
||||
out = self.gamma * X_normed + self.beta
|
||||
return out
|
||||
# sample-wise normalization
|
||||
m = K.mean(x, axis=-1, keepdims=True)
|
||||
std = K.sqrt(K.var(x, axis=-1, keepdims=True) + self.epsilon)
|
||||
x_normed = (x - m) / (std + self.epsilon)
|
||||
x_normed = self.gamma * x_normed + self.beta
|
||||
return x_normed
|
||||
|
||||
def get_config(self):
|
||||
config = {"name": self.__class__.__name__,
|
||||
"epsilon": self.epsilon,
|
||||
config = {"epsilon": self.epsilon,
|
||||
"mode": self.mode,
|
||||
"axis": self.axis,
|
||||
"momentum": self.momentum}
|
||||
|
||||
@@ -0,0 +1,400 @@
|
||||
# -*- coding: utf-8 -*-
|
||||
from __future__ import absolute_import
|
||||
|
||||
from .. import backend as K
|
||||
from ..engine import Layer, InputSpec
|
||||
from ..utils.np_utils import conv_output_length
|
||||
|
||||
|
||||
class _Pooling1D(Layer):
|
||||
'''Abstract class for different pooling 1D layers.
|
||||
'''
|
||||
input_dim = 3
|
||||
|
||||
def __init__(self, pool_length=2, stride=None,
|
||||
border_mode='valid', **kwargs):
|
||||
super(_Pooling1D, self).__init__(**kwargs)
|
||||
if stride is None:
|
||||
stride = pool_length
|
||||
self.pool_length = pool_length
|
||||
self.stride = stride
|
||||
self.st = (self.stride, 1)
|
||||
self.pool_size = (pool_length, 1)
|
||||
assert border_mode in {'valid', 'same'}, 'border_mode must be in {valid, same}'
|
||||
self.border_mode = border_mode
|
||||
self.input_spec = [InputSpec(ndim=3)]
|
||||
|
||||
def get_output_shape_for(self, input_shape):
|
||||
length = conv_output_length(input_shape[1], self.pool_length,
|
||||
self.border_mode, self.stride)
|
||||
return (input_shape[0], length, input_shape[2])
|
||||
|
||||
def _pooling_function(self, back_end, inputs, pool_size, strides,
|
||||
border_mode, dim_ordering):
|
||||
raise NotImplementedError
|
||||
|
||||
def call(self, x, mask=None):
|
||||
x = K.expand_dims(x, -1) # add dummy last dimension
|
||||
x = K.permute_dimensions(x, (0, 2, 1, 3))
|
||||
output = self._pooling_function(inputs=x, pool_size=self.pool_size,
|
||||
strides=self.st,
|
||||
border_mode=self.border_mode,
|
||||
dim_ordering='th')
|
||||
output = K.permute_dimensions(output, (0, 2, 1, 3))
|
||||
return K.squeeze(output, 3) # remove dummy last dimension
|
||||
|
||||
def get_config(self):
|
||||
config = {'stride': self.stride,
|
||||
'pool_length': self.pool_length,
|
||||
'border_mode': self.border_mode}
|
||||
base_config = super(_Pooling1D, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class MaxPooling1D(_Pooling1D):
|
||||
'''Max pooling operation for temporal data.
|
||||
|
||||
# Input shape
|
||||
3D tensor with shape: `(samples, steps, features)`.
|
||||
|
||||
# Output shape
|
||||
3D tensor with shape: `(samples, downsampled_steps, features)`.
|
||||
|
||||
# Arguments
|
||||
pool_length: size of the region to which max pooling is applied
|
||||
stride: integer, or None. factor by which to downscale.
|
||||
2 will halve the input.
|
||||
If None, it will default to `pool_length`.
|
||||
border_mode: 'valid' or 'same'.
|
||||
Note: 'same' will only work with TensorFlow for the time being.
|
||||
'''
|
||||
|
||||
def __init__(self, pool_length=2, stride=None,
|
||||
border_mode='valid', **kwargs):
|
||||
super(MaxPooling1D, self).__init__(pool_length, stride,
|
||||
border_mode, **kwargs)
|
||||
|
||||
def _pooling_function(self, inputs, pool_size, strides,
|
||||
border_mode, dim_ordering):
|
||||
output = K.pool2d(inputs, pool_size, strides,
|
||||
border_mode, dim_ordering, pool_mode='max')
|
||||
return output
|
||||
|
||||
|
||||
class AveragePooling1D(_Pooling1D):
|
||||
'''Average pooling for temporal data.
|
||||
|
||||
# Arguments
|
||||
pool_length: factor by which to downscale. 2 will halve the input.
|
||||
stride: integer, or None. Stride value.
|
||||
If None, it will default to `pool_length`.
|
||||
border_mode: 'valid' or 'same'.
|
||||
Note: 'same' will only work with TensorFlow for the time being.
|
||||
|
||||
# Input shape
|
||||
3D tensor with shape: `(samples, steps, features)`.
|
||||
|
||||
# Output shape
|
||||
3D tensor with shape: `(samples, downsampled_steps, features)`.
|
||||
'''
|
||||
|
||||
def __init__(self, pool_length=2, stride=None,
|
||||
border_mode='valid', **kwargs):
|
||||
super(AveragePooling1D, self).__init__(pool_length, stride,
|
||||
border_mode, **kwargs)
|
||||
|
||||
def _pooling_function(self, inputs, pool_size, strides,
|
||||
border_mode, dim_ordering):
|
||||
output = K.pool2d(inputs, pool_size, strides,
|
||||
border_mode, dim_ordering, pool_mode='avg')
|
||||
return output
|
||||
|
||||
|
||||
class _Pooling2D(Layer):
|
||||
'''Abstract class for different pooling 2D layers.
|
||||
'''
|
||||
|
||||
def __init__(self, pool_size=(2, 2), strides=None, border_mode='valid',
|
||||
dim_ordering='default', **kwargs):
|
||||
super(_Pooling2D, self).__init__(**kwargs)
|
||||
if dim_ordering == 'default':
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
self.pool_size = tuple(pool_size)
|
||||
if strides is None:
|
||||
strides = self.pool_size
|
||||
self.strides = tuple(strides)
|
||||
assert border_mode in {'valid', 'same'}, 'border_mode must be in {valid, same}'
|
||||
self.border_mode = border_mode
|
||||
assert dim_ordering in {'tf', 'th'}, 'dim_ordering must be in {tf, th}'
|
||||
self.dim_ordering = dim_ordering
|
||||
self.input_spec = [InputSpec(ndim=4)]
|
||||
|
||||
def get_output_shape_for(self, input_shape):
|
||||
if self.dim_ordering == 'th':
|
||||
rows = input_shape[2]
|
||||
cols = input_shape[3]
|
||||
elif self.dim_ordering == 'tf':
|
||||
rows = input_shape[1]
|
||||
cols = input_shape[2]
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + self.dim_ordering)
|
||||
|
||||
rows = conv_output_length(rows, self.pool_size[0],
|
||||
self.border_mode, self.strides[0])
|
||||
cols = conv_output_length(cols, self.pool_size[1],
|
||||
self.border_mode, self.strides[1])
|
||||
|
||||
if self.dim_ordering == 'th':
|
||||
return (input_shape[0], input_shape[1], rows, cols)
|
||||
elif self.dim_ordering == 'tf':
|
||||
return (input_shape[0], rows, cols, input_shape[3])
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + self.dim_ordering)
|
||||
|
||||
def _pooling_function(self, inputs, pool_size, strides,
|
||||
border_mode, dim_ordering):
|
||||
raise NotImplementedError
|
||||
|
||||
def call(self, x, mask=None):
|
||||
output = self._pooling_function(inputs=x, pool_size=self.pool_size,
|
||||
strides=self.strides,
|
||||
border_mode=self.border_mode,
|
||||
dim_ordering=self.dim_ordering)
|
||||
return output
|
||||
|
||||
def get_config(self):
|
||||
config = {'pool_size': self.pool_size,
|
||||
'border_mode': self.border_mode,
|
||||
'strides': self.strides,
|
||||
'dim_ordering': self.dim_ordering}
|
||||
base_config = super(_Pooling2D, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class MaxPooling2D(_Pooling2D):
|
||||
'''Max pooling operation for spatial data.
|
||||
|
||||
# Arguments
|
||||
pool_size: tuple of 2 integers,
|
||||
factors by which to downscale (vertical, horizontal).
|
||||
(2, 2) will halve the image in each dimension.
|
||||
strides: tuple of 2 integers, or None. Strides values.
|
||||
If None, it will default to `pool_size`.
|
||||
border_mode: 'valid' or 'same'.
|
||||
Note: 'same' will only work with TensorFlow for the time being.
|
||||
dim_ordering: 'th' or 'tf'. In 'th' mode, the channels dimension
|
||||
(the depth) is at index 1, in 'tf' mode is it at index 3.
|
||||
It defaults to the `image_dim_ordering` value found in your
|
||||
Keras config file at `~/.keras/keras.json`.
|
||||
If you never set it, then it will be "th".
|
||||
|
||||
# Input shape
|
||||
4D tensor with shape:
|
||||
`(samples, channels, rows, cols)` if dim_ordering='th'
|
||||
or 4D tensor with shape:
|
||||
`(samples, rows, cols, channels)` if dim_ordering='tf'.
|
||||
|
||||
# Output shape
|
||||
4D tensor with shape:
|
||||
`(nb_samples, channels, pooled_rows, pooled_cols)` if dim_ordering='th'
|
||||
or 4D tensor with shape:
|
||||
`(samples, pooled_rows, pooled_cols, channels)` if dim_ordering='tf'.
|
||||
'''
|
||||
|
||||
def __init__(self, pool_size=(2, 2), strides=None, border_mode='valid',
|
||||
dim_ordering='default', **kwargs):
|
||||
super(MaxPooling2D, self).__init__(pool_size, strides, border_mode,
|
||||
dim_ordering, **kwargs)
|
||||
|
||||
def _pooling_function(self, inputs, pool_size, strides,
|
||||
border_mode, dim_ordering):
|
||||
output = K.pool2d(inputs, pool_size, strides,
|
||||
border_mode, dim_ordering, pool_mode='max')
|
||||
return output
|
||||
|
||||
|
||||
class AveragePooling2D(_Pooling2D):
|
||||
'''Average pooling operation for spatial data.
|
||||
|
||||
# Arguments
|
||||
pool_size: tuple of 2 integers,
|
||||
factors by which to downscale (vertical, horizontal).
|
||||
(2, 2) will halve the image in each dimension.
|
||||
strides: tuple of 2 integers, or None. Strides values.
|
||||
If None, it will default to `pool_size`.
|
||||
border_mode: 'valid' or 'same'.
|
||||
Note: 'same' will only work with TensorFlow for the time being.
|
||||
dim_ordering: 'th' or 'tf'. In 'th' mode, the channels dimension
|
||||
(the depth) is at index 1, in 'tf' mode is it at index 3.
|
||||
It defaults to the `image_dim_ordering` value found in your
|
||||
Keras config file at `~/.keras/keras.json`.
|
||||
If you never set it, then it will be "th".
|
||||
|
||||
# Input shape
|
||||
4D tensor with shape:
|
||||
`(samples, channels, rows, cols)` if dim_ordering='th'
|
||||
or 4D tensor with shape:
|
||||
`(samples, rows, cols, channels)` if dim_ordering='tf'.
|
||||
|
||||
# Output shape
|
||||
4D tensor with shape:
|
||||
`(nb_samples, channels, pooled_rows, pooled_cols)` if dim_ordering='th'
|
||||
or 4D tensor with shape:
|
||||
`(samples, pooled_rows, pooled_cols, channels)` if dim_ordering='tf'.
|
||||
'''
|
||||
|
||||
def __init__(self, pool_size=(2, 2), strides=None, border_mode='valid',
|
||||
dim_ordering='default', **kwargs):
|
||||
super(AveragePooling2D, self).__init__(pool_size, strides, border_mode,
|
||||
dim_ordering, **kwargs)
|
||||
|
||||
def _pooling_function(self, inputs, pool_size, strides,
|
||||
border_mode, dim_ordering):
|
||||
output = K.pool2d(inputs, pool_size, strides,
|
||||
border_mode, dim_ordering, pool_mode='avg')
|
||||
return output
|
||||
|
||||
|
||||
class _Pooling3D(Layer):
|
||||
'''Abstract class for different pooling 3D layers.
|
||||
'''
|
||||
|
||||
def __init__(self, pool_size=(2, 2, 2), strides=None, border_mode='valid',
|
||||
dim_ordering='default', **kwargs):
|
||||
super(_Pooling3D, self).__init__(**kwargs)
|
||||
if dim_ordering == 'default':
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
self.pool_size = tuple(pool_size)
|
||||
if strides is None:
|
||||
strides = self.pool_size
|
||||
self.strides = tuple(strides)
|
||||
assert border_mode in {'valid', 'same'}, 'border_mode must be in {valid, same}'
|
||||
self.border_mode = border_mode
|
||||
assert dim_ordering in {'tf', 'th'}, 'dim_ordering must be in {tf, th}'
|
||||
self.dim_ordering = dim_ordering
|
||||
self.input_spec = [InputSpec(ndim=5)]
|
||||
|
||||
def get_output_shape_for(self, input_shape):
|
||||
if self.dim_ordering == 'th':
|
||||
len_dim1 = input_shape[2]
|
||||
len_dim2 = input_shape[3]
|
||||
len_dim3 = input_shape[4]
|
||||
elif self.dim_ordering == 'tf':
|
||||
len_dim1 = input_shape[1]
|
||||
len_dim2 = input_shape[2]
|
||||
len_dim3 = input_shape[3]
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + self.dim_ordering)
|
||||
|
||||
len_dim1 = conv_output_length(len_dim1, self.pool_size[0],
|
||||
self.border_mode, self.strides[0])
|
||||
len_dim2 = conv_output_length(len_dim2, self.pool_size[1],
|
||||
self.border_mode, self.strides[1])
|
||||
len_dim3 = conv_output_length(len_dim3, self.pool_size[2],
|
||||
self.border_mode, self.strides[2])
|
||||
|
||||
if self.dim_ordering == 'th':
|
||||
return (input_shape[0], input_shape[1], len_dim1, len_dim2, len_dim3)
|
||||
elif self.dim_ordering == 'tf':
|
||||
return (input_shape[0], len_dim1, len_dim2, len_dim3, input_shape[4])
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + self.dim_ordering)
|
||||
|
||||
def _pooling_function(self, inputs, pool_size, strides,
|
||||
border_mode, dim_ordering):
|
||||
raise NotImplementedError
|
||||
|
||||
def call(self, x, mask=None):
|
||||
output = self._pooling_function(inputs=x, pool_size=self.pool_size,
|
||||
strides=self.strides,
|
||||
border_mode=self.border_mode,
|
||||
dim_ordering=self.dim_ordering)
|
||||
return output
|
||||
|
||||
def get_config(self):
|
||||
config = {'pool_size': self.pool_size,
|
||||
'border_mode': self.border_mode,
|
||||
'strides': self.strides,
|
||||
'dim_ordering': self.dim_ordering}
|
||||
base_config = super(_Pooling3D, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class MaxPooling3D(_Pooling3D):
|
||||
'''Max pooling operation for 3D data (spatial or spatio-temporal).
|
||||
|
||||
# Arguments
|
||||
pool_size: tuple of 3 integers,
|
||||
factors by which to downscale (dim1, dim2, dim3).
|
||||
(2, 2, 2) will halve the size of the 3D input in each dimension.
|
||||
strides: tuple of 3 integers, or None. Strides values.
|
||||
border_mode: 'valid' or 'same'.
|
||||
dim_ordering: 'th' or 'tf'. In 'th' mode, the channels dimension
|
||||
(the depth) is at index 1, in 'tf' mode is it at index 4.
|
||||
It defaults to the `image_dim_ordering` value found in your
|
||||
Keras config file at `~/.keras/keras.json`.
|
||||
If you never set it, then it will be "th".
|
||||
|
||||
# Input shape
|
||||
5D tensor with shape:
|
||||
`(samples, channels, len_pool_dim1, len_pool_dim2, len_pool_dim3)` if dim_ordering='th'
|
||||
or 5D tensor with shape:
|
||||
`(samples, len_pool_dim1, len_pool_dim2, len_pool_dim3, channels)` if dim_ordering='tf'.
|
||||
|
||||
# Output shape
|
||||
5D tensor with shape:
|
||||
`(nb_samples, channels, pooled_dim1, pooled_dim2, pooled_dim3)` if dim_ordering='th'
|
||||
or 5D tensor with shape:
|
||||
`(samples, pooled_dim1, pooled_dim2, pooled_dim3, channels)` if dim_ordering='tf'.
|
||||
'''
|
||||
|
||||
def __init__(self, pool_size=(2, 2, 2), strides=None, border_mode='valid',
|
||||
dim_ordering='default', **kwargs):
|
||||
super(MaxPooling3D, self).__init__(pool_size, strides, border_mode,
|
||||
dim_ordering, **kwargs)
|
||||
|
||||
def _pooling_function(self, inputs, pool_size, strides,
|
||||
border_mode, dim_ordering):
|
||||
output = K.pool3d(inputs, pool_size, strides,
|
||||
border_mode, dim_ordering, pool_mode='max')
|
||||
return output
|
||||
|
||||
|
||||
class AveragePooling3D(_Pooling3D):
|
||||
'''Average pooling operation for 3D data (spatial or spatio-temporal).
|
||||
|
||||
# Arguments
|
||||
pool_size: tuple of 3 integers,
|
||||
factors by which to downscale (dim1, dim2, dim3).
|
||||
(2, 2, 2) will halve the size of the 3D input in each dimension.
|
||||
strides: tuple of 3 integers, or None. Strides values.
|
||||
border_mode: 'valid' or 'same'.
|
||||
dim_ordering: 'th' or 'tf'. In 'th' mode, the channels dimension
|
||||
(the depth) is at index 1, in 'tf' mode is it at index 4.
|
||||
It defaults to the `image_dim_ordering` value found in your
|
||||
Keras config file at `~/.keras/keras.json`.
|
||||
If you never set it, then it will be "th".
|
||||
|
||||
# Input shape
|
||||
5D tensor with shape:
|
||||
`(samples, channels, len_pool_dim1, len_pool_dim2, len_pool_dim3)` if dim_ordering='th'
|
||||
or 5D tensor with shape:
|
||||
`(samples, len_pool_dim1, len_pool_dim2, len_pool_dim3, channels)` if dim_ordering='tf'.
|
||||
|
||||
# Output shape
|
||||
5D tensor with shape:
|
||||
`(nb_samples, channels, pooled_dim1, pooled_dim2, pooled_dim3)` if dim_ordering='th'
|
||||
or 5D tensor with shape:
|
||||
`(samples, pooled_dim1, pooled_dim2, pooled_dim3, channels)` if dim_ordering='tf'.
|
||||
'''
|
||||
|
||||
def __init__(self, pool_size=(2, 2, 2), strides=None, border_mode='valid',
|
||||
dim_ordering='default', **kwargs):
|
||||
super(AveragePooling3D, self).__init__(pool_size, strides, border_mode,
|
||||
dim_ordering, **kwargs)
|
||||
|
||||
def _pooling_function(self, inputs, pool_size, strides,
|
||||
border_mode, dim_ordering):
|
||||
output = K.pool3d(inputs, pool_size, strides,
|
||||
border_mode, dim_ordering, pool_mode='avg')
|
||||
return output
|
||||
+414
-258
@@ -4,7 +4,7 @@ import numpy as np
|
||||
|
||||
from .. import backend as K
|
||||
from .. import activations, initializations, regularizers
|
||||
from ..layers.core import MaskedLayer
|
||||
from ..engine import Layer, InputSpec
|
||||
|
||||
|
||||
def time_distributed_dense(x, w, b=None, dropout=None,
|
||||
@@ -21,12 +21,12 @@ def time_distributed_dense(x, w, b=None, dropout=None,
|
||||
# won't work with TensorFlow
|
||||
output_dim = K.shape(w)[1]
|
||||
|
||||
if dropout:
|
||||
if dropout is not None and 0. < dropout < 1.:
|
||||
# apply the same dropout pattern at every timestep
|
||||
ones = K.ones_like(K.reshape(x[:, 0, :], (-1, input_dim)))
|
||||
dropout_matrix = K.dropout(ones, dropout)
|
||||
expanded_dropout_matrix = K.repeat(dropout_matrix, timesteps)
|
||||
x *= expanded_dropout_matrix
|
||||
x = K.in_train_phase(x * expanded_dropout_matrix, x)
|
||||
|
||||
# collapse time dimension and batch dimension together
|
||||
x = K.reshape(x, (-1, input_dim))
|
||||
@@ -39,24 +39,34 @@ def time_distributed_dense(x, w, b=None, dropout=None,
|
||||
return x
|
||||
|
||||
|
||||
class Recurrent(MaskedLayer):
|
||||
class Recurrent(Layer):
|
||||
'''Abstract base class for recurrent layers.
|
||||
Do not use in a model -- it's not a functional layer!
|
||||
Do not use in a model -- it's not a valid layer!
|
||||
Use its children classes `LSTM`, `GRU` and `SimpleRNN` instead.
|
||||
|
||||
All recurrent layers (GRU, LSTM, SimpleRNN) also
|
||||
All recurrent layers (`LSTM`, `GRU`, `SimpleRNN`) also
|
||||
follow the specifications of this class and accept
|
||||
the keyword arguments listed below.
|
||||
|
||||
# Input shape
|
||||
3D tensor with shape `(nb_samples, timesteps, input_dim)`.
|
||||
# Example
|
||||
|
||||
# Output shape
|
||||
- if `return_sequences`: 3D tensor with shape
|
||||
`(nb_samples, timesteps, output_dim)`.
|
||||
- else, 2D tensor with shape `(nb_samples, output_dim)`.
|
||||
```python
|
||||
# as the first layer in a Sequential model
|
||||
model = Sequential()
|
||||
model.add(LSTM(32, input_shape=(10, 64)))
|
||||
# now model.output_shape == (None, 32)
|
||||
# note: `None` is the batch dimension.
|
||||
|
||||
# the following is identical:
|
||||
model = Sequential()
|
||||
model.add(LSTM(32, input_dim=64, input_length=10))
|
||||
|
||||
# for subsequent layers, not need to specify the input size:
|
||||
model.add(LSTM(16))
|
||||
```
|
||||
|
||||
# Arguments
|
||||
weights: list of numpy arrays to set as initial weights.
|
||||
weights: list of Numpy arrays to set as initial weights.
|
||||
The list should have 3 elements, of shapes:
|
||||
`[(input_dim, output_dim), (output_dim, output_dim), (output_dim,)]`.
|
||||
return_sequences: Boolean. Whether to return the last output
|
||||
@@ -66,6 +76,23 @@ class Recurrent(MaskedLayer):
|
||||
stateful: Boolean (default False). If True, the last state
|
||||
for each sample at index i in a batch will be used as initial
|
||||
state for the sample of index i in the following batch.
|
||||
unroll: Boolean (default False). If True, the network will be unrolled,
|
||||
else a symbolic loop will be used. When using TensorFlow, the network
|
||||
is always unrolled, so this argument does not do anything.
|
||||
Unrolling can speed-up a RNN, although it tends to be more memory-intensive.
|
||||
Unrolling is only suitable for short sequences.
|
||||
consume_less: one of "cpu", "mem", or "gpu" (LSTM/GRU only).
|
||||
If set to "cpu", the RNN will use
|
||||
an implementation that uses fewer, larger matrix products,
|
||||
thus running faster on CPU but consuming more memory.
|
||||
If set to "mem", the RNN will use more matrix products,
|
||||
but smaller ones, thus running slower (may actually be faster on GPU)
|
||||
while consuming less memory.
|
||||
If set to "gpu" (LSTM/GRU only), the RNN will combine the input gate,
|
||||
the forget gate and the output gate into a single matrix,
|
||||
enabling more time-efficient parallelization on the GPU. Note: RNN
|
||||
dropout must be shared for all gates, resulting in a slightly
|
||||
reduced regularization.
|
||||
input_dim: dimensionality of the input (integer).
|
||||
This argument (or alternatively, the keyword argument `input_shape`)
|
||||
is required when using this layer as the first layer in a model.
|
||||
@@ -79,6 +106,14 @@ class Recurrent(MaskedLayer):
|
||||
at the level of the first layer
|
||||
(e.g. via the `input_shape` argument)
|
||||
|
||||
# Input shape
|
||||
3D tensor with shape `(nb_samples, timesteps, input_dim)`.
|
||||
|
||||
# Output shape
|
||||
- if `return_sequences`: 3D tensor with shape
|
||||
`(nb_samples, timesteps, output_dim)`.
|
||||
- else, 2D tensor with shape `(nb_samples, output_dim)`.
|
||||
|
||||
# Masking
|
||||
This layer supports masking for input data with a variable number
|
||||
of timesteps. To introduce masks to your data,
|
||||
@@ -104,7 +139,10 @@ class Recurrent(MaskedLayer):
|
||||
To enable statefulness:
|
||||
- specify `stateful=True` in the layer constructor.
|
||||
- specify a fixed batch size for your model, by passing
|
||||
a `batch_input_shape=(...)` to the first layer in your model.
|
||||
if sequential model:
|
||||
a `batch_input_shape=(...)` to the first layer in your model.
|
||||
else for functional model with 1 or more Input layers:
|
||||
a `batch_shape=(...)` to all the first layers in your model.
|
||||
This is the expected shape of your inputs *including the batch size*.
|
||||
It should be a tuple of integers, e.g. `(32, 10, 100)`.
|
||||
|
||||
@@ -115,83 +153,87 @@ class Recurrent(MaskedLayer):
|
||||
When using the TensorFlow backend, specify a fixed batch size for your model
|
||||
following the notes on statefulness RNNs.
|
||||
'''
|
||||
input_ndim = 3
|
||||
|
||||
def __init__(self, weights=None,
|
||||
return_sequences=False, go_backwards=False, stateful=False,
|
||||
unroll=False, consume_less='cpu',
|
||||
input_dim=None, input_length=None, **kwargs):
|
||||
self.return_sequences = return_sequences
|
||||
self.initial_weights = weights
|
||||
self.go_backwards = go_backwards
|
||||
self.stateful = stateful
|
||||
self.unroll = unroll
|
||||
self.consume_less = consume_less
|
||||
|
||||
self.supports_masking = True
|
||||
self.input_spec = [InputSpec(ndim=3)]
|
||||
self.input_dim = input_dim
|
||||
self.input_length = input_length
|
||||
if self.input_dim:
|
||||
kwargs['input_shape'] = (self.input_length, self.input_dim)
|
||||
super(Recurrent, self).__init__(**kwargs)
|
||||
|
||||
def get_output_mask(self, train=False):
|
||||
if self.return_sequences:
|
||||
return super(Recurrent, self).get_output_mask(train)
|
||||
else:
|
||||
return None
|
||||
|
||||
@property
|
||||
def output_shape(self):
|
||||
input_shape = self.input_shape
|
||||
def get_output_shape_for(self, input_shape):
|
||||
if self.return_sequences:
|
||||
return (input_shape[0], input_shape[1], self.output_dim)
|
||||
else:
|
||||
return (input_shape[0], self.output_dim)
|
||||
|
||||
def compute_mask(self, input, mask):
|
||||
if self.return_sequences:
|
||||
return mask
|
||||
else:
|
||||
return None
|
||||
|
||||
def step(self, x, states):
|
||||
raise NotImplementedError
|
||||
|
||||
def get_constants(self, x, train=False):
|
||||
def get_constants(self, x):
|
||||
return []
|
||||
|
||||
def get_initial_states(self, x):
|
||||
# build an all-zero tensor of shape (samples, output_dim)
|
||||
initial_state = K.zeros_like(x) # (samples, timesteps, input_dim)
|
||||
initial_state = K.sum(initial_state, axis=1) # (samples, input_dim)
|
||||
reducer = K.zeros((self.input_dim, self.output_dim))
|
||||
initial_state = K.dot(initial_state, reducer) # (samples, output_dim)
|
||||
initial_state = K.sum(initial_state, axis=(1, 2)) # (samples,)
|
||||
initial_state = K.expand_dims(initial_state) # (samples, 1)
|
||||
initial_state = K.tile(initial_state, [1, self.output_dim]) # (samples, output_dim)
|
||||
initial_states = [initial_state for _ in range(len(self.states))]
|
||||
return initial_states
|
||||
|
||||
def preprocess_input(self, x, train=False):
|
||||
def preprocess_input(self, x):
|
||||
return x
|
||||
|
||||
def get_output(self, train=False):
|
||||
def call(self, x, mask=None):
|
||||
# input shape: (nb_samples, time (padded with zeros), input_dim)
|
||||
X = self.get_input(train)
|
||||
mask = self.get_input_mask(train)
|
||||
|
||||
assert K.ndim(X) == 3
|
||||
# note that the .build() method of subclasses MUST define
|
||||
# self.input_spec with a complete input shape.
|
||||
input_shape = self.input_spec[0].shape
|
||||
if K._BACKEND == 'tensorflow':
|
||||
if not self.input_shape[1]:
|
||||
raise Exception('When using TensorFlow, you should define ' +
|
||||
'explicitly the number of timesteps of ' +
|
||||
'your sequences.\n' +
|
||||
'If your first layer is an Embedding, ' +
|
||||
'make sure to pass it an "input_length" ' +
|
||||
'argument. Otherwise, make sure ' +
|
||||
'the first layer has ' +
|
||||
'an "input_shape" or "batch_input_shape" ' +
|
||||
'argument, including the time axis.')
|
||||
if not input_shape[1]:
|
||||
raise Exception('When using TensorFlow, you should define '
|
||||
'explicitly the number of timesteps of '
|
||||
'your sequences.\n'
|
||||
'If your first layer is an Embedding, '
|
||||
'make sure to pass it an "input_length" '
|
||||
'argument. Otherwise, make sure '
|
||||
'the first layer has '
|
||||
'an "input_shape" or "batch_input_shape" '
|
||||
'argument, including the time axis. '
|
||||
'Found input shape at layer ' + self.name +
|
||||
': ' + str(input_shape))
|
||||
if self.stateful:
|
||||
initial_states = self.states
|
||||
else:
|
||||
initial_states = self.get_initial_states(X)
|
||||
constants = self.get_constants(X, train)
|
||||
preprocessed_input = self.preprocess_input(X, train)
|
||||
initial_states = self.get_initial_states(x)
|
||||
constants = self.get_constants(x)
|
||||
preprocessed_input = self.preprocess_input(x)
|
||||
|
||||
last_output, outputs, states = K.rnn(self.step, preprocessed_input,
|
||||
initial_states,
|
||||
go_backwards=self.go_backwards,
|
||||
mask=mask,
|
||||
constants=constants)
|
||||
constants=constants,
|
||||
unroll=self.unroll,
|
||||
input_length=input_shape[1])
|
||||
if self.stateful:
|
||||
self.updates = []
|
||||
for i in range(len(states)):
|
||||
@@ -203,12 +245,13 @@ class Recurrent(MaskedLayer):
|
||||
return last_output
|
||||
|
||||
def get_config(self):
|
||||
config = {"name": self.__class__.__name__,
|
||||
"return_sequences": self.return_sequences,
|
||||
"go_backwards": self.go_backwards,
|
||||
"stateful": self.stateful}
|
||||
config = {'return_sequences': self.return_sequences,
|
||||
'go_backwards': self.go_backwards,
|
||||
'stateful': self.stateful,
|
||||
'unroll': self.unroll,
|
||||
'consume_less': self.consume_less}
|
||||
if self.stateful:
|
||||
config['batch_input_shape'] = self.input_shape
|
||||
config['batch_input_shape'] = self.input_spec[0].shape
|
||||
else:
|
||||
config['input_dim'] = self.input_dim
|
||||
config['input_length'] = self.input_length
|
||||
@@ -254,10 +297,13 @@ class SimpleRNN(Recurrent):
|
||||
self.U_regularizer = regularizers.get(U_regularizer)
|
||||
self.b_regularizer = regularizers.get(b_regularizer)
|
||||
self.dropout_W, self.dropout_U = dropout_W, dropout_U
|
||||
|
||||
if self.dropout_W or self.dropout_U:
|
||||
self.uses_learning_phase = True
|
||||
super(SimpleRNN, self).__init__(**kwargs)
|
||||
|
||||
def build(self):
|
||||
input_shape = self.input_shape
|
||||
def build(self, input_shape):
|
||||
self.input_spec = [InputSpec(shape=input_shape)]
|
||||
if self.stateful:
|
||||
self.reset_states()
|
||||
else:
|
||||
@@ -277,10 +323,10 @@ class SimpleRNN(Recurrent):
|
||||
self.W_regularizer.set_param(self.W)
|
||||
self.regularizers.append(self.W_regularizer)
|
||||
if self.U_regularizer:
|
||||
self.W_regularizer.set_param(self.U)
|
||||
self.U_regularizer.set_param(self.U)
|
||||
self.regularizers.append(self.U_regularizer)
|
||||
if self.b_regularizer:
|
||||
self.W_regularizer.set_param(self.b)
|
||||
self.b_regularizer.set_param(self.b)
|
||||
self.regularizers.append(self.b_regularizer)
|
||||
|
||||
self.trainable_weights = [self.W, self.U, self.b]
|
||||
@@ -291,7 +337,7 @@ class SimpleRNN(Recurrent):
|
||||
|
||||
def reset_states(self):
|
||||
assert self.stateful, 'Layer must be stateful.'
|
||||
input_shape = self.input_shape
|
||||
input_shape = self.input_spec[0].shape
|
||||
if not input_shape[0]:
|
||||
raise Exception('If a RNN is stateful, a complete ' +
|
||||
'input_shape must be provided (including batch size).')
|
||||
@@ -301,44 +347,60 @@ class SimpleRNN(Recurrent):
|
||||
else:
|
||||
self.states = [K.zeros((input_shape[0], self.output_dim))]
|
||||
|
||||
def preprocess_input(self, x, train=False):
|
||||
if train and (0 < self.dropout_W < 1):
|
||||
dropout = self.dropout_W
|
||||
def preprocess_input(self, x):
|
||||
if self.consume_less == 'cpu':
|
||||
input_shape = self.input_spec[0].shape
|
||||
input_dim = input_shape[2]
|
||||
timesteps = input_shape[1]
|
||||
return time_distributed_dense(x, self.W, self.b, self.dropout_W,
|
||||
input_dim, self.output_dim,
|
||||
timesteps)
|
||||
else:
|
||||
dropout = 0
|
||||
input_shape = self.input_shape
|
||||
input_dim = input_shape[2]
|
||||
timesteps = input_shape[1]
|
||||
return time_distributed_dense(x, self.W, self.b, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
return x
|
||||
|
||||
def step(self, h, states):
|
||||
def step(self, x, states):
|
||||
prev_output = states[0]
|
||||
if len(states) == 2:
|
||||
B_U = states[1]
|
||||
B_U = states[1]
|
||||
B_W = states[2]
|
||||
|
||||
if self.consume_less == 'cpu':
|
||||
h = x
|
||||
else:
|
||||
B_U = 1.
|
||||
h = K.dot(x * B_W, self.W) + self.b
|
||||
|
||||
output = self.activation(h + K.dot(prev_output * B_U, self.U))
|
||||
return output, [output]
|
||||
|
||||
def get_constants(self, x, train=False):
|
||||
if train and (0 < self.dropout_U < 1):
|
||||
def get_constants(self, x):
|
||||
constants = []
|
||||
if 0 < self.dropout_U < 1:
|
||||
ones = K.ones_like(K.reshape(x[:, 0, 0], (-1, 1)))
|
||||
ones = K.concatenate([ones] * self.output_dim, 1)
|
||||
B_U = K.dropout(ones, self.dropout_U)
|
||||
return [B_U]
|
||||
return []
|
||||
B_U = K.in_train_phase(K.dropout(ones, self.dropout_U), ones)
|
||||
constants.append(B_U)
|
||||
else:
|
||||
constants.append(K.cast_to_floatx(1.))
|
||||
if self.consume_less == 'cpu' and 0 < self.dropout_W < 1:
|
||||
input_shape = self.input_spec[0].shape
|
||||
input_dim = input_shape[-1]
|
||||
ones = K.ones_like(K.reshape(x[:, 0, 0], (-1, 1)))
|
||||
ones = K.concatenate([ones] * input_dim, 1)
|
||||
B_W = K.in_train_phase(K.dropout(ones, self.dropout_W), ones)
|
||||
constants.append(B_W)
|
||||
else:
|
||||
constants.append(K.cast_to_floatx(1.))
|
||||
return constants
|
||||
|
||||
def get_config(self):
|
||||
config = {"output_dim": self.output_dim,
|
||||
"init": self.init.__name__,
|
||||
"inner_init": self.inner_init.__name__,
|
||||
"activation": self.activation.__name__,
|
||||
"W_regularizer": self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
"U_regularizer": self.U_regularizer.get_config() if self.U_regularizer else None,
|
||||
"b_regularizer": self.b_regularizer.get_config() if self.b_regularizer else None,
|
||||
"dropout_W": self.dropout_W,
|
||||
"dropout_U": self.dropout_U}
|
||||
config = {'output_dim': self.output_dim,
|
||||
'init': self.init.__name__,
|
||||
'inner_init': self.inner_init.__name__,
|
||||
'activation': self.activation.__name__,
|
||||
'W_regularizer': self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
'U_regularizer': self.U_regularizer.get_config() if self.U_regularizer else None,
|
||||
'b_regularizer': self.b_regularizer.get_config() if self.b_regularizer else None,
|
||||
'dropout_W': self.dropout_W,
|
||||
'dropout_U': self.dropout_U}
|
||||
base_config = super(SimpleRNN, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
@@ -384,64 +446,80 @@ class GRU(Recurrent):
|
||||
self.U_regularizer = regularizers.get(U_regularizer)
|
||||
self.b_regularizer = regularizers.get(b_regularizer)
|
||||
self.dropout_W, self.dropout_U = dropout_W, dropout_U
|
||||
|
||||
if self.dropout_W or self.dropout_U:
|
||||
self.uses_learning_phase = True
|
||||
super(GRU, self).__init__(**kwargs)
|
||||
|
||||
def build(self):
|
||||
input_shape = self.input_shape
|
||||
input_dim = input_shape[2]
|
||||
self.input_dim = input_dim
|
||||
def build(self, input_shape):
|
||||
self.input_spec = [InputSpec(shape=input_shape)]
|
||||
self.input_dim = input_shape[2]
|
||||
|
||||
self.W_z = self.init((input_dim, self.output_dim),
|
||||
name='{}_W_z'.format(self.name))
|
||||
self.U_z = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_z'.format(self.name))
|
||||
self.b_z = K.zeros((self.output_dim,), name='{}_b_z'.format(self.name))
|
||||
|
||||
self.W_r = self.init((input_dim, self.output_dim),
|
||||
name='{}_W_r'.format(self.name))
|
||||
self.U_r = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_r'.format(self.name))
|
||||
self.b_r = K.zeros((self.output_dim,), name='{}_b_r'.format(self.name))
|
||||
|
||||
self.W_h = self.init((input_dim, self.output_dim),
|
||||
name='{}_W_h'.format(self.name))
|
||||
self.U_h = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_h'.format(self.name))
|
||||
self.b_h = K.zeros((self.output_dim,), name='{}_b_h'.format(self.name))
|
||||
|
||||
self.regularizers = []
|
||||
if self.W_regularizer:
|
||||
self.W_regularizer.set_param(K.concatenate([self.W_z,
|
||||
self.W_r,
|
||||
self.W_h]))
|
||||
self.regularizers.append(self.W_regularizer)
|
||||
if self.U_regularizer:
|
||||
self.U_regularizer.set_param(K.concatenate([self.U_z,
|
||||
self.U_r,
|
||||
self.U_h]))
|
||||
self.regularizers.append(self.U_regularizer)
|
||||
if self.b_regularizer:
|
||||
self.b_regularizer.set_param(K.concatenate([self.b_z,
|
||||
self.b_r,
|
||||
self.b_h]))
|
||||
self.regularizers.append(self.b_regularizer)
|
||||
|
||||
self.trainable_weights = [self.W_z, self.U_z, self.b_z,
|
||||
self.W_r, self.U_r, self.b_r,
|
||||
self.W_h, self.U_h, self.b_h]
|
||||
if self.stateful:
|
||||
self.reset_states()
|
||||
else:
|
||||
# initial states: all-zero tensor of shape (output_dim)
|
||||
self.states = [None]
|
||||
|
||||
if self.consume_less == 'gpu':
|
||||
|
||||
self.W = self.init((self.input_dim, 3 * self.output_dim),
|
||||
name='{}_W'.format(self.name))
|
||||
self.U = self.inner_init((self.output_dim, 3 * self.output_dim),
|
||||
name='{}_U'.format(self.name))
|
||||
|
||||
self.b = K.variable(np.hstack((np.zeros(self.output_dim),
|
||||
np.zeros(self.output_dim),
|
||||
np.zeros(self.output_dim))),
|
||||
name='{}_b'.format(self.name))
|
||||
|
||||
self.trainable_weights = [self.W, self.U, self.b]
|
||||
else:
|
||||
|
||||
self.W_z = self.init((self.input_dim, self.output_dim),
|
||||
name='{}_W_z'.format(self.name))
|
||||
self.U_z = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_z'.format(self.name))
|
||||
self.b_z = K.zeros((self.output_dim,), name='{}_b_z'.format(self.name))
|
||||
|
||||
self.W_r = self.init((self.input_dim, self.output_dim),
|
||||
name='{}_W_r'.format(self.name))
|
||||
self.U_r = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_r'.format(self.name))
|
||||
self.b_r = K.zeros((self.output_dim,), name='{}_b_r'.format(self.name))
|
||||
|
||||
self.W_h = self.init((self.input_dim, self.output_dim),
|
||||
name='{}_W_h'.format(self.name))
|
||||
self.U_h = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_h'.format(self.name))
|
||||
self.b_h = K.zeros((self.output_dim,), name='{}_b_h'.format(self.name))
|
||||
|
||||
self.trainable_weights = [self.W_z, self.U_z, self.b_z,
|
||||
self.W_r, self.U_r, self.b_r,
|
||||
self.W_h, self.U_h, self.b_h]
|
||||
|
||||
self.W = K.concatenate([self.W_z, self.W_r, self.W_h])
|
||||
self.U = K.concatenate([self.U_z, self.U_r, self.U_h])
|
||||
self.b = K.concatenate([self.b_z, self.b_r, self.b_h])
|
||||
|
||||
self.regularizers = []
|
||||
if self.W_regularizer:
|
||||
self.W_regularizer.set_param(self.W)
|
||||
self.regularizers.append(self.W_regularizer)
|
||||
if self.U_regularizer:
|
||||
self.U_regularizer.set_param(self.U)
|
||||
self.regularizers.append(self.U_regularizer)
|
||||
if self.b_regularizer:
|
||||
self.b_regularizer.set_param(self.b)
|
||||
self.regularizers.append(self.b_regularizer)
|
||||
|
||||
if self.initial_weights is not None:
|
||||
self.set_weights(self.initial_weights)
|
||||
del self.initial_weights
|
||||
|
||||
def reset_states(self):
|
||||
assert self.stateful, 'Layer must be stateful.'
|
||||
input_shape = self.input_shape
|
||||
input_shape = self.input_spec[0].shape
|
||||
if not input_shape[0]:
|
||||
raise Exception('If a RNN is stateful, a complete ' +
|
||||
'input_shape must be provided (including batch size).')
|
||||
@@ -451,60 +529,93 @@ class GRU(Recurrent):
|
||||
else:
|
||||
self.states = [K.zeros((input_shape[0], self.output_dim))]
|
||||
|
||||
def preprocess_input(self, x, train=False):
|
||||
if train and (0 < self.dropout_W < 1):
|
||||
dropout = self.dropout_W
|
||||
else:
|
||||
dropout = 0
|
||||
input_shape = self.input_shape
|
||||
input_dim = input_shape[2]
|
||||
timesteps = input_shape[1]
|
||||
def preprocess_input(self, x):
|
||||
if self.consume_less == 'cpu':
|
||||
input_shape = self.input_spec[0].shape
|
||||
input_dim = input_shape[2]
|
||||
timesteps = input_shape[1]
|
||||
|
||||
x_z = time_distributed_dense(x, self.W_z, self.b_z, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_r = time_distributed_dense(x, self.W_r, self.b_r, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_h = time_distributed_dense(x, self.W_h, self.b_h, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
return K.concatenate([x_z, x_r, x_h], axis=2)
|
||||
x_z = time_distributed_dense(x, self.W_z, self.b_z, self.dropout_W,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_r = time_distributed_dense(x, self.W_r, self.b_r, self.dropout_W,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_h = time_distributed_dense(x, self.W_h, self.b_h, self.dropout_W,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
return K.concatenate([x_z, x_r, x_h], axis=2)
|
||||
else:
|
||||
return x
|
||||
|
||||
def step(self, x, states):
|
||||
h_tm1 = states[0] # previous memory
|
||||
if len(states) == 2:
|
||||
B_U = states[1] # dropout matrices for recurrent units
|
||||
B_U = states[1] # dropout matrices for recurrent units
|
||||
B_W = states[2]
|
||||
|
||||
if self.consume_less == 'gpu':
|
||||
|
||||
matrix_x = K.dot(x * B_W[0], self.W) + self.b
|
||||
matrix_inner = K.dot(h_tm1 * B_U[0], self.U[:, :2 * self.output_dim])
|
||||
|
||||
x_z = matrix_x[:, :self.output_dim]
|
||||
x_r = matrix_x[:, self.output_dim: 2 * self.output_dim]
|
||||
inner_z = matrix_inner[:, :self.output_dim]
|
||||
inner_r = matrix_inner[:, self.output_dim: 2 * self.output_dim]
|
||||
|
||||
z = self.inner_activation(x_z + inner_z)
|
||||
r = self.inner_activation(x_r + inner_r)
|
||||
|
||||
x_h = matrix_x[:, 2 * self.output_dim:]
|
||||
inner_h = K.dot(r * h_tm1 * B_U[0], self.U[:, 2 * self.output_dim:])
|
||||
hh = self.activation(x_h + inner_h)
|
||||
else:
|
||||
B_U = [1., 1., 1.]
|
||||
if self.consume_less == 'cpu':
|
||||
x_z = x[:, :self.output_dim]
|
||||
x_r = x[:, self.output_dim: 2 * self.output_dim]
|
||||
x_h = x[:, 2 * self.output_dim:]
|
||||
elif self.consume_less == 'mem':
|
||||
x_z = K.dot(x * B_W[0], self.W_z) + self.b_z
|
||||
x_r = K.dot(x * B_W[1], self.W_r) + self.b_r
|
||||
x_h = K.dot(x * B_W[2], self.W_h) + self.b_h
|
||||
else:
|
||||
raise Exception('Unknown `consume_less` mode.')
|
||||
z = self.inner_activation(x_z + K.dot(h_tm1 * B_U[0], self.U_z))
|
||||
r = self.inner_activation(x_r + K.dot(h_tm1 * B_U[1], self.U_r))
|
||||
|
||||
x_z = x[:, :self.output_dim]
|
||||
x_r = x[:, self.output_dim: 2 * self.output_dim]
|
||||
x_h = x[:, 2 * self.output_dim:]
|
||||
|
||||
z = self.inner_activation(x_z + K.dot(h_tm1 * B_U[0], self.U_z))
|
||||
r = self.inner_activation(x_r + K.dot(h_tm1 * B_U[1], self.U_r))
|
||||
|
||||
hh = self.activation(x_h + K.dot(r * h_tm1 * B_U[2], self.U_h))
|
||||
hh = self.activation(x_h + K.dot(r * h_tm1 * B_U[2], self.U_h))
|
||||
h = z * h_tm1 + (1 - z) * hh
|
||||
return h, [h]
|
||||
|
||||
def get_constants(self, x, train=False):
|
||||
if train and (0 < self.dropout_U < 1):
|
||||
def get_constants(self, x):
|
||||
constants = []
|
||||
if 0 < self.dropout_U < 1:
|
||||
ones = K.ones_like(K.reshape(x[:, 0, 0], (-1, 1)))
|
||||
ones = K.concatenate([ones] * self.output_dim, 1)
|
||||
B_U = [K.dropout(ones, self.dropout_U) for _ in range(3)]
|
||||
return [B_U]
|
||||
return []
|
||||
B_U = [K.in_train_phase(K.dropout(ones, self.dropout_U), ones) for _ in range(3)]
|
||||
constants.append(B_U)
|
||||
else:
|
||||
constants.append([K.cast_to_floatx(1.) for _ in range(3)])
|
||||
|
||||
if 0 < self.dropout_W < 1:
|
||||
input_shape = self.input_spec[0].shape
|
||||
input_dim = input_shape[-1]
|
||||
ones = K.ones_like(K.reshape(x[:, 0, 0], (-1, 1)))
|
||||
ones = K.concatenate([ones] * input_dim, 1)
|
||||
B_W = [K.in_train_phase(K.dropout(ones, self.dropout_W), ones) for _ in range(3)]
|
||||
constants.append(B_W)
|
||||
else:
|
||||
constants.append([K.cast_to_floatx(1.) for _ in range(3)])
|
||||
return constants
|
||||
|
||||
def get_config(self):
|
||||
config = {"output_dim": self.output_dim,
|
||||
"init": self.init.__name__,
|
||||
"inner_init": self.inner_init.__name__,
|
||||
"activation": self.activation.__name__,
|
||||
"inner_activation": self.inner_activation.__name__,
|
||||
"W_regularizer": self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
"U_regularizer": self.U_regularizer.get_config() if self.U_regularizer else None,
|
||||
"b_regularizer": self.b_regularizer.get_config() if self.b_regularizer else None,
|
||||
"dropout_W": self.dropout_W,
|
||||
"dropout_U": self.dropout_U}
|
||||
config = {'output_dim': self.output_dim,
|
||||
'init': self.init.__name__,
|
||||
'inner_init': self.inner_init.__name__,
|
||||
'activation': self.activation.__name__,
|
||||
'inner_activation': self.inner_activation.__name__,
|
||||
'W_regularizer': self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
'U_regularizer': self.U_regularizer.get_config() if self.U_regularizer else None,
|
||||
'b_regularizer': self.b_regularizer.get_config() if self.b_regularizer else None,
|
||||
'dropout_W': self.dropout_W,
|
||||
'dropout_U': self.dropout_U}
|
||||
base_config = super(GRU, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
@@ -559,12 +670,14 @@ class LSTM(Recurrent):
|
||||
self.U_regularizer = regularizers.get(U_regularizer)
|
||||
self.b_regularizer = regularizers.get(b_regularizer)
|
||||
self.dropout_W, self.dropout_U = dropout_W, dropout_U
|
||||
|
||||
if self.dropout_W or self.dropout_U:
|
||||
self.uses_learning_phase = True
|
||||
super(LSTM, self).__init__(**kwargs)
|
||||
|
||||
def build(self):
|
||||
input_shape = self.input_shape
|
||||
input_dim = input_shape[2]
|
||||
self.input_dim = input_dim
|
||||
def build(self, input_shape):
|
||||
self.input_spec = [InputSpec(shape=input_shape)]
|
||||
self.input_dim = input_shape[2]
|
||||
|
||||
if self.stateful:
|
||||
self.reset_states()
|
||||
@@ -572,63 +685,71 @@ class LSTM(Recurrent):
|
||||
# initial states: 2 all-zero tensors of shape (output_dim)
|
||||
self.states = [None, None]
|
||||
|
||||
self.W_i = self.init((input_dim, self.output_dim),
|
||||
name='{}_W_i'.format(self.name))
|
||||
self.U_i = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_i'.format(self.name))
|
||||
self.b_i = K.zeros((self.output_dim,), name='{}_b_i'.format(self.name))
|
||||
if self.consume_less == 'gpu':
|
||||
self.W = self.init((self.input_dim, 4 * self.output_dim),
|
||||
name='{}_W'.format(self.name))
|
||||
self.U = self.inner_init((self.output_dim, 4 * self.output_dim),
|
||||
name='{}_U'.format(self.name))
|
||||
|
||||
self.W_f = self.init((input_dim, self.output_dim),
|
||||
name='{}_W_f'.format(self.name))
|
||||
self.U_f = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_f'.format(self.name))
|
||||
self.b_f = self.forget_bias_init((self.output_dim,),
|
||||
name='{}_b_f'.format(self.name))
|
||||
self.b = K.variable(np.hstack((np.zeros(self.output_dim),
|
||||
K.get_value(self.forget_bias_init((self.output_dim,))),
|
||||
np.zeros(self.output_dim),
|
||||
np.zeros(self.output_dim))),
|
||||
name='{}_b'.format(self.name))
|
||||
self.trainable_weights = [self.W, self.U, self.b]
|
||||
else:
|
||||
self.W_i = self.init((self.input_dim, self.output_dim),
|
||||
name='{}_W_i'.format(self.name))
|
||||
self.U_i = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_i'.format(self.name))
|
||||
self.b_i = K.zeros((self.output_dim,), name='{}_b_i'.format(self.name))
|
||||
|
||||
self.W_c = self.init((input_dim, self.output_dim),
|
||||
name='{}_W_c'.format(self.name))
|
||||
self.U_c = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_c'.format(self.name))
|
||||
self.b_c = K.zeros((self.output_dim,), name='{}_b_c'.format(self.name))
|
||||
self.W_f = self.init((self.input_dim, self.output_dim),
|
||||
name='{}_W_f'.format(self.name))
|
||||
self.U_f = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_f'.format(self.name))
|
||||
self.b_f = self.forget_bias_init((self.output_dim,),
|
||||
name='{}_b_f'.format(self.name))
|
||||
|
||||
self.W_o = self.init((input_dim, self.output_dim),
|
||||
name='{}_W_o'.format(self.name))
|
||||
self.U_o = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_o'.format(self.name))
|
||||
self.b_o = K.zeros((self.output_dim,), name='{}_b_o'.format(self.name))
|
||||
self.W_c = self.init((self.input_dim, self.output_dim),
|
||||
name='{}_W_c'.format(self.name))
|
||||
self.U_c = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_c'.format(self.name))
|
||||
self.b_c = K.zeros((self.output_dim,), name='{}_b_c'.format(self.name))
|
||||
|
||||
self.W_o = self.init((self.input_dim, self.output_dim),
|
||||
name='{}_W_o'.format(self.name))
|
||||
self.U_o = self.inner_init((self.output_dim, self.output_dim),
|
||||
name='{}_U_o'.format(self.name))
|
||||
self.b_o = K.zeros((self.output_dim,), name='{}_b_o'.format(self.name))
|
||||
|
||||
self.trainable_weights = [self.W_i, self.U_i, self.b_i,
|
||||
self.W_c, self.U_c, self.b_c,
|
||||
self.W_f, self.U_f, self.b_f,
|
||||
self.W_o, self.U_o, self.b_o]
|
||||
|
||||
self.W = K.concatenate([self.W_i, self.W_f, self.W_c, self.W_o])
|
||||
self.U = K.concatenate([self.U_i, self.U_f, self.U_c, self.U_o])
|
||||
self.b = K.concatenate([self.b_i, self.b_f, self.b_c, self.b_o])
|
||||
|
||||
self.regularizers = []
|
||||
if self.W_regularizer:
|
||||
self.W_regularizer.set_param(K.concatenate([self.W_i,
|
||||
self.W_f,
|
||||
self.W_c,
|
||||
self.W_o]))
|
||||
self.W_regularizer.set_param(self.W)
|
||||
self.regularizers.append(self.W_regularizer)
|
||||
if self.U_regularizer:
|
||||
self.U_regularizer.set_param(K.concatenate([self.U_i,
|
||||
self.U_f,
|
||||
self.U_c,
|
||||
self.U_o]))
|
||||
self.U_regularizer.set_param(self.U)
|
||||
self.regularizers.append(self.U_regularizer)
|
||||
if self.b_regularizer:
|
||||
self.b_regularizer.set_param(K.concatenate([self.b_i,
|
||||
self.b_f,
|
||||
self.b_c,
|
||||
self.b_o]))
|
||||
self.b_regularizer.set_param(self.b)
|
||||
self.regularizers.append(self.b_regularizer)
|
||||
|
||||
self.trainable_weights = [self.W_i, self.U_i, self.b_i,
|
||||
self.W_c, self.U_c, self.b_c,
|
||||
self.W_f, self.U_f, self.b_f,
|
||||
self.W_o, self.U_o, self.b_o]
|
||||
|
||||
if self.initial_weights is not None:
|
||||
self.set_weights(self.initial_weights)
|
||||
del self.initial_weights
|
||||
|
||||
def reset_states(self):
|
||||
assert self.stateful, 'Layer must be stateful.'
|
||||
input_shape = self.input_shape
|
||||
input_shape = self.input_spec[0].shape
|
||||
if not input_shape[0]:
|
||||
raise Exception('If a RNN is stateful, a complete ' +
|
||||
'input_shape must be provided (including batch size).')
|
||||
@@ -641,65 +762,100 @@ class LSTM(Recurrent):
|
||||
self.states = [K.zeros((input_shape[0], self.output_dim)),
|
||||
K.zeros((input_shape[0], self.output_dim))]
|
||||
|
||||
def preprocess_input(self, x, train=False):
|
||||
if train and (0 < self.dropout_W < 1):
|
||||
dropout = self.dropout_W
|
||||
else:
|
||||
dropout = 0
|
||||
input_shape = self.input_shape
|
||||
input_dim = input_shape[2]
|
||||
timesteps = input_shape[1]
|
||||
def preprocess_input(self, x):
|
||||
if self.consume_less == 'cpu':
|
||||
if 0 < self.dropout_W < 1:
|
||||
dropout = self.dropout_W
|
||||
else:
|
||||
dropout = 0
|
||||
input_shape = self.input_spec[0].shape
|
||||
input_dim = input_shape[2]
|
||||
timesteps = input_shape[1]
|
||||
|
||||
x_i = time_distributed_dense(x, self.W_i, self.b_i, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_f = time_distributed_dense(x, self.W_f, self.b_f, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_c = time_distributed_dense(x, self.W_c, self.b_c, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_o = time_distributed_dense(x, self.W_o, self.b_o, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
return K.concatenate([x_i, x_f, x_c, x_o], axis=2)
|
||||
x_i = time_distributed_dense(x, self.W_i, self.b_i, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_f = time_distributed_dense(x, self.W_f, self.b_f, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_c = time_distributed_dense(x, self.W_c, self.b_c, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
x_o = time_distributed_dense(x, self.W_o, self.b_o, dropout,
|
||||
input_dim, self.output_dim, timesteps)
|
||||
return K.concatenate([x_i, x_f, x_c, x_o], axis=2)
|
||||
else:
|
||||
return x
|
||||
|
||||
def step(self, x, states):
|
||||
h_tm1 = states[0]
|
||||
c_tm1 = states[1]
|
||||
if len(states) == 3:
|
||||
B_U = states[2]
|
||||
B_U = states[2]
|
||||
B_W = states[3]
|
||||
|
||||
if self.consume_less == 'gpu':
|
||||
z = K.dot(x * B_W[0], self.W) + K.dot(h_tm1 * B_U[0], self.U) + self.b
|
||||
|
||||
z0 = z[:, :self.output_dim]
|
||||
z1 = z[:, self.output_dim: 2 * self.output_dim]
|
||||
z2 = z[:, 2 * self.output_dim: 3 * self.output_dim]
|
||||
z3 = z[:, 3 * self.output_dim:]
|
||||
|
||||
i = self.inner_activation(z0)
|
||||
f = self.inner_activation(z1)
|
||||
c = f * c_tm1 + i * self.activation(z2)
|
||||
o = self.inner_activation(z3)
|
||||
else:
|
||||
B_U = [1. for _ in range(4)]
|
||||
if self.consume_less == 'cpu':
|
||||
x_i = x[:, :self.output_dim]
|
||||
x_f = x[:, self.output_dim: 2 * self.output_dim]
|
||||
x_c = x[:, 2 * self.output_dim: 3 * self.output_dim]
|
||||
x_o = x[:, 3 * self.output_dim:]
|
||||
elif self.consume_less == 'mem':
|
||||
x_i = K.dot(x * B_W[0], self.W_i) + self.b_i
|
||||
x_f = K.dot(x * B_W[1], self.W_f) + self.b_f
|
||||
x_c = K.dot(x * B_W[2], self.W_c) + self.b_c
|
||||
x_o = K.dot(x * B_W[3], self.W_o) + self.b_o
|
||||
else:
|
||||
raise Exception('Unknown `consume_less` mode.')
|
||||
|
||||
x_i = x[:, :self.output_dim]
|
||||
x_f = x[:, self.output_dim: 2 * self.output_dim]
|
||||
x_c = x[:, 2 * self.output_dim: 3 * self.output_dim]
|
||||
x_o = x[:, 3 * self.output_dim:]
|
||||
|
||||
i = self.inner_activation(x_i + K.dot(h_tm1 * B_U[0], self.U_i))
|
||||
f = self.inner_activation(x_f + K.dot(h_tm1 * B_U[1], self.U_f))
|
||||
c = f * c_tm1 + i * self.activation(x_c + K.dot(h_tm1 * B_U[2], self.U_c))
|
||||
o = self.inner_activation(x_o + K.dot(h_tm1 * B_U[3], self.U_o))
|
||||
i = self.inner_activation(x_i + K.dot(h_tm1 * B_U[0], self.U_i))
|
||||
f = self.inner_activation(x_f + K.dot(h_tm1 * B_U[1], self.U_f))
|
||||
c = f * c_tm1 + i * self.activation(x_c + K.dot(h_tm1 * B_U[2], self.U_c))
|
||||
o = self.inner_activation(x_o + K.dot(h_tm1 * B_U[3], self.U_o))
|
||||
|
||||
h = o * self.activation(c)
|
||||
return h, [h, c]
|
||||
|
||||
def get_constants(self, x, train=False):
|
||||
if train and (0 < self.dropout_U < 1):
|
||||
def get_constants(self, x):
|
||||
constants = []
|
||||
if 0 < self.dropout_U < 1:
|
||||
ones = K.ones_like(K.reshape(x[:, 0, 0], (-1, 1)))
|
||||
ones = K.concatenate([ones] * self.output_dim, 1)
|
||||
B_U = [K.dropout(ones, self.dropout_U) for _ in range(4)]
|
||||
return [B_U]
|
||||
return []
|
||||
B_U = [K.in_train_phase(K.dropout(ones, self.dropout_U), ones) for _ in range(4)]
|
||||
constants.append(B_U)
|
||||
else:
|
||||
constants.append([K.cast_to_floatx(1.) for _ in range(4)])
|
||||
|
||||
if 0 < self.dropout_W < 1:
|
||||
input_shape = self.input_spec[0].shape
|
||||
input_dim = input_shape[-1]
|
||||
ones = K.ones_like(K.reshape(x[:, 0, 0], (-1, 1)))
|
||||
ones = K.concatenate([ones] * input_dim, 1)
|
||||
B_W = [K.in_train_phase(K.dropout(ones, self.dropout_W), ones) for _ in range(4)]
|
||||
constants.append(B_W)
|
||||
else:
|
||||
constants.append([K.cast_to_floatx(1.) for _ in range(4)])
|
||||
return constants
|
||||
|
||||
def get_config(self):
|
||||
config = {"output_dim": self.output_dim,
|
||||
"init": self.init.__name__,
|
||||
"inner_init": self.inner_init.__name__,
|
||||
"forget_bias_init": self.forget_bias_init.__name__,
|
||||
"activation": self.activation.__name__,
|
||||
"inner_activation": self.inner_activation.__name__,
|
||||
"W_regularizer": self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
"U_regularizer": self.U_regularizer.get_config() if self.U_regularizer else None,
|
||||
"b_regularizer": self.b_regularizer.get_config() if self.b_regularizer else None,
|
||||
"dropout_W": self.dropout_W,
|
||||
"dropout_U": self.dropout_U}
|
||||
config = {'output_dim': self.output_dim,
|
||||
'init': self.init.__name__,
|
||||
'inner_init': self.inner_init.__name__,
|
||||
'forget_bias_init': self.forget_bias_init.__name__,
|
||||
'activation': self.activation.__name__,
|
||||
'inner_activation': self.inner_activation.__name__,
|
||||
'W_regularizer': self.W_regularizer.get_config() if self.W_regularizer else None,
|
||||
'U_regularizer': self.U_regularizer.get_config() if self.U_regularizer else None,
|
||||
'b_regularizer': self.b_regularizer.get_config() if self.b_regularizer else None,
|
||||
'dropout_W': self.dropout_W,
|
||||
'dropout_U': self.dropout_U}
|
||||
base_config = super(LSTM, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
+78
-57
@@ -1,8 +1,46 @@
|
||||
from .core import MaskedLayer
|
||||
from ..engine import Layer, InputSpec
|
||||
from .. import backend as K
|
||||
|
||||
|
||||
class TimeDistributed(MaskedLayer):
|
||||
class Wrapper(Layer):
|
||||
|
||||
def __init__(self, layer, **kwargs):
|
||||
self.layer = layer
|
||||
self.uses_learning_phase = layer.uses_learning_phase
|
||||
super(Wrapper, self).__init__(**kwargs)
|
||||
|
||||
def build(self, input_shape=None):
|
||||
'''Assumes that self.layer is already set.
|
||||
Should be called at the end of .build() in the
|
||||
children classes.
|
||||
'''
|
||||
self.trainable_weights = getattr(self.layer, 'trainable_weights', [])
|
||||
self.non_trainable_weights = getattr(self.layer, 'non_trainable_weights', [])
|
||||
self.updates = getattr(self.layer, 'updates', [])
|
||||
self.regularizers = getattr(self.layer, 'regularizers', [])
|
||||
self.constraints = getattr(self.layer, 'constraints', {})
|
||||
|
||||
def get_weights(self):
|
||||
weights = self.layer.get_weights()
|
||||
return weights
|
||||
|
||||
def set_weights(self, weights):
|
||||
self.layer.set_weights(weights)
|
||||
|
||||
def get_config(self):
|
||||
config = {'layer': {'class_name': self.layer.__class__.__name__,
|
||||
'config': self.layer.get_config()}}
|
||||
base_config = super(Wrapper, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
@classmethod
|
||||
def from_config(cls, config):
|
||||
from keras.utils.layer_utils import layer_from_config
|
||||
layer = layer_from_config(config.pop('layer'))
|
||||
return cls(layer, **config)
|
||||
|
||||
|
||||
class TimeDistributed(Wrapper):
|
||||
"""This wrapper allows to apply a layer to every
|
||||
temporal slice of an input.
|
||||
|
||||
@@ -16,8 +54,14 @@ class TimeDistributed(MaskedLayer):
|
||||
|
||||
You can then use `TimeDistributed` to apply a `Dense` layer to each of the 10 timesteps, independently:
|
||||
```python
|
||||
# as the first layer in a model
|
||||
model = Sequential()
|
||||
model.add(TimeDistributed(Dense(8), input_shape=(10, 16)))
|
||||
# now model.output_shape == (None, 10, 8)
|
||||
|
||||
# subsequent layers: no need for input_shape
|
||||
model.add(TimeDistributed(Dense(32)))
|
||||
# now model.output_shape == (None, 10, 32)
|
||||
```
|
||||
|
||||
The output will then have shape `(32, 10, 8)`.
|
||||
@@ -35,80 +79,57 @@ class TimeDistributed(MaskedLayer):
|
||||
# Arguments
|
||||
layer: a layer instance.
|
||||
"""
|
||||
|
||||
def __init__(self, layer, **kwargs):
|
||||
self.layer = layer
|
||||
super(TimeDistributed, self).__init__(**kwargs)
|
||||
self.supports_masking = True
|
||||
super(TimeDistributed, self).__init__(layer, **kwargs)
|
||||
|
||||
def build(self):
|
||||
input_shape = self.input_shape
|
||||
def build(self, input_shape):
|
||||
assert len(input_shape) >= 3
|
||||
self.input_spec = [InputSpec(shape=input_shape)]
|
||||
if K._BACKEND == 'tensorflow':
|
||||
if not input_shape[1]:
|
||||
raise Exception('When using TensorFlow, you should define '
|
||||
'explicitly the number of timesteps of '
|
||||
'your sequences.\n'
|
||||
'If your first layer is an Embedding, '
|
||||
'make sure to pass it an "input_length" '
|
||||
'argument. Otherwise, make sure '
|
||||
'the first layer has '
|
||||
'an "input_shape" or "batch_input_shape" '
|
||||
'argument, including the time axis.')
|
||||
child_input_shape = (input_shape[0],) + input_shape[2:]
|
||||
self.layer.set_input_shape(child_input_shape)
|
||||
self.layer.build()
|
||||
if not self.layer.built:
|
||||
self.layer.build(child_input_shape)
|
||||
self.layer.built = True
|
||||
super(TimeDistributed, self).build()
|
||||
|
||||
trainable_weights, regularizers, constraints, updates = self.layer.get_params()
|
||||
self.trainable_weights = trainable_weights
|
||||
self.non_trainable_weights = self.layer.non_trainable_weights
|
||||
self.regularizers = regularizers
|
||||
self.constraints = constraints
|
||||
self.updates = updates
|
||||
|
||||
@property
|
||||
def output_shape(self):
|
||||
child_output_shape = self.layer.output_shape
|
||||
timesteps = self.input_shape[1]
|
||||
def get_output_shape_for(self, input_shape):
|
||||
child_input_shape = (input_shape[0],) + input_shape[2:]
|
||||
child_output_shape = self.layer.get_output_shape_for(child_input_shape)
|
||||
timesteps = input_shape[1]
|
||||
return (child_output_shape[0], timesteps) + child_output_shape[1:]
|
||||
|
||||
def get_output(self, train=False):
|
||||
X = self.get_input(train)
|
||||
mask = self.get_input_mask(train)
|
||||
|
||||
if K._BACKEND == 'tensorflow':
|
||||
if not self.input_shape[1]:
|
||||
raise Exception('When using TensorFlow, you should define ' +
|
||||
'explicitly the number of timesteps of ' +
|
||||
'your sequences.\n' +
|
||||
'If your first layer is an Embedding, ' +
|
||||
'make sure to pass it an "input_length" ' +
|
||||
'argument. Otherwise, make sure ' +
|
||||
'the first layer has ' +
|
||||
'an "input_shape" or "batch_input_shape" ' +
|
||||
'argument, including the time axis.')
|
||||
|
||||
if self.input_shape[0]:
|
||||
def call(self, X, mask=None):
|
||||
input_shape = self.input_spec[0].shape
|
||||
if input_shape[0]:
|
||||
# batch size matters, use rnn-based implementation
|
||||
def step(x, states):
|
||||
output = self.layer(x, train=train)
|
||||
output = self.layer.call(x)
|
||||
return output, []
|
||||
|
||||
last_output, outputs, states = K.rnn(step, X,
|
||||
initial_states=[],
|
||||
mask=mask)
|
||||
initial_states=[])
|
||||
y = outputs
|
||||
else:
|
||||
# no batch size specified, therefore the layer will be able
|
||||
# to process batches of any size
|
||||
# we can go with reshape-based implementation for performance
|
||||
input_shape = self.input_shape
|
||||
x = K.reshape(X, (-1, ) + input_shape[2:]) # (nb_samples * timesteps, ...)
|
||||
y = self.layer(x, train=False) # (nb_samples * timesteps, ...)
|
||||
input_length = input_shape[1]
|
||||
if not input_length:
|
||||
input_length = K.shape(X)[1]
|
||||
X = K.reshape(X, (-1, ) + input_shape[2:]) # (nb_samples * timesteps, ...)
|
||||
y = self.layer.call(X) # (nb_samples * timesteps, ...)
|
||||
# (nb_samples, timesteps, ...)
|
||||
y = K.reshape(y, (-1, input_length) + self.layer.output_shape[1:])
|
||||
output_shape = self.get_output_shape_for(input_shape)
|
||||
y = K.reshape(y, (-1, input_length) + output_shape[2:])
|
||||
return y
|
||||
|
||||
def get_weights(self):
|
||||
weights = self.layer.get_weights()
|
||||
return weights
|
||||
|
||||
def set_weights(self, weights):
|
||||
self.layer.set_weights(weights)
|
||||
|
||||
def get_config(self):
|
||||
config = {'name': self.__class__.__name__,
|
||||
'layer': self.layer.get_config()}
|
||||
base_config = super(TimeDistributed, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
@@ -0,0 +1,775 @@
|
||||
from collections import OrderedDict
|
||||
import warnings
|
||||
import copy
|
||||
|
||||
from .. import backend as K
|
||||
from ..layers import InputLayer, Layer, Merge
|
||||
from ..engine.training import Model
|
||||
|
||||
|
||||
class Graph(Model):
|
||||
'''Arbitrary connection graph.
|
||||
|
||||
THIS IS A LEGACY MODEL AND SHOULD NOT BE USED
|
||||
except for backwards compatibility support.
|
||||
|
||||
For multi-inputs/multi-outputs models, or
|
||||
models using shared layers, use the functional API instead.
|
||||
'''
|
||||
|
||||
def __init__(self, name=None):
|
||||
# model attributes
|
||||
self.inbound_nodes = []
|
||||
self.outbound_nodes = []
|
||||
self.built = False
|
||||
self.supports_masking = False
|
||||
|
||||
# legacy attributes (we prefix them with _graph_)
|
||||
self._graph_namespace = set() # strings
|
||||
self._graph_nodes = OrderedDict() # layer-like
|
||||
self._graph_inputs = OrderedDict() # layer-like
|
||||
self._graph_outputs = OrderedDict() # layer-like
|
||||
self._graph_input_config = [] # dicts
|
||||
self._graph_output_config = [] # dicts
|
||||
self._graph_node_config = [] # dicts
|
||||
self._graph_shared_nodes_names = []
|
||||
|
||||
if not name:
|
||||
prefix = 'graph_'
|
||||
name = prefix + str(K.get_uid(prefix))
|
||||
self.name = name
|
||||
|
||||
def __call__(self, x, mask=None):
|
||||
self.build()
|
||||
return super(Graph, self).__call__(x, mask)
|
||||
|
||||
def build(self, input_shape=None):
|
||||
# this will crash if the input/output layers have multiple nodes
|
||||
# no plans to support that case since Graph is deprecated
|
||||
input_tensors = [layer.output for layer in self._graph_inputs.values()]
|
||||
output_tensors = [layer.output for layer in self._graph_outputs.values()]
|
||||
# actually create the model
|
||||
super(Graph, self).__init__(input_tensors,
|
||||
output_tensors,
|
||||
name=self.name)
|
||||
self.built = True
|
||||
|
||||
def compile(self, optimizer, loss,
|
||||
metrics=[],
|
||||
sample_weight_modes=None,
|
||||
loss_weights=None,
|
||||
**kwargs):
|
||||
'''Configures the learning process.
|
||||
|
||||
# Arguments
|
||||
optimizer: str (name of optimizer) or optimizer object.
|
||||
See [optimizers](optimizers.md).
|
||||
loss: dictionary mapping the name(s) of the output(s) to
|
||||
a loss function (string name of objective function or
|
||||
objective function. See [objectives](objectives.md)).
|
||||
metrics: list of str (name of metrics) or
|
||||
list of metrics functions. See [metrics](metrics.md).
|
||||
sample_weight_modes: optional dictionary mapping certain
|
||||
output names to a sample weight mode ("temporal" and None
|
||||
are the only supported modes). If you need to do
|
||||
timestep-wise loss weighting on one of your graph outputs,
|
||||
you will need to set the sample weight mode for this output
|
||||
to "temporal".
|
||||
loss_weights: dictionary you can pass to specify a weight
|
||||
coefficient for each loss function (in a multi-output model).
|
||||
If no loss weight is specified for an output,
|
||||
the weight for this output's loss will be considered to be 1.
|
||||
kwargs: for Theano backend, these are passed into K.function.
|
||||
Ignored for Tensorflow backend.
|
||||
'''
|
||||
# create the underlying Model
|
||||
if not self.built:
|
||||
self.build()
|
||||
super(Graph, self).compile(optimizer, loss,
|
||||
metrics=metrics,
|
||||
sample_weight_mode=sample_weight_modes,
|
||||
loss_weights=loss_weights,
|
||||
**kwargs)
|
||||
|
||||
def add_input(self, name, input_shape=None,
|
||||
batch_input_shape=None, dtype='float'):
|
||||
'''Adds an input to the graph.
|
||||
|
||||
# Arguments:
|
||||
name: string. The name of the new input.
|
||||
Must be unique in the graph.
|
||||
input_shape: a tuple of integers,
|
||||
the expected shape of the input samples.
|
||||
Does not include the batch size.
|
||||
batch_input_shape: a tuple of integers,
|
||||
the expected shape of the whole input batch,
|
||||
including the batch size.
|
||||
dtype: 'float', or 'int'.
|
||||
'''
|
||||
if name in self._graph_namespace:
|
||||
raise Exception('Duplicate node identifier: ' + name)
|
||||
self._graph_namespace.add(name)
|
||||
self.built = False
|
||||
|
||||
if dtype[:3] == 'int':
|
||||
dtype = 'int32'
|
||||
elif dtype[:5] == 'float':
|
||||
dtype = K.floatx()
|
||||
else:
|
||||
raise Exception('Uknown dtype (should be "int" or "float"): ' +
|
||||
str(dtype))
|
||||
|
||||
# create input layer
|
||||
input_layer = InputLayer(input_shape=input_shape,
|
||||
batch_input_shape=batch_input_shape,
|
||||
name=name, input_dtype=dtype)
|
||||
self._graph_inputs[name] = input_layer
|
||||
|
||||
# append input config to self._graph_input_config
|
||||
config = {'name': name, 'dtype': dtype}
|
||||
if batch_input_shape:
|
||||
config['batch_input_shape'] = batch_input_shape
|
||||
else:
|
||||
config['input_shape'] = input_shape
|
||||
self._graph_input_config.append(config)
|
||||
|
||||
def add_node(self, layer, name, input=None, inputs=[],
|
||||
merge_mode='concat', concat_axis=-1, dot_axes=-1,
|
||||
create_output=False):
|
||||
'''Adds a node in the graph. It can be connected to multiple
|
||||
inputs, which will first be merged into one tensor
|
||||
according to the mode specified.
|
||||
|
||||
# Arguments
|
||||
layer: the layer at the node.
|
||||
name: name for the node.
|
||||
input: when connecting the layer to a single input,
|
||||
this is the name of the incoming node.
|
||||
inputs: when connecting the layer to multiple inputs,
|
||||
this is a list of names of incoming nodes.
|
||||
merge_mode: one of {concat, sum, dot, ave, mul}
|
||||
concat_axis: when `merge_mode=='concat'`, this is the
|
||||
input concatenation axis.
|
||||
dot_axes: when `merge_mode='dot'`,
|
||||
this is the contraction axes specification;
|
||||
see the `Merge` layer for details.
|
||||
create_output: boolean. Set this to `True` if you want the output
|
||||
of your node to be an output of the graph.
|
||||
'''
|
||||
if name in self._graph_namespace:
|
||||
raise Exception('Duplicate node identifier: ' + name)
|
||||
self._graph_namespace.add(name)
|
||||
layer.name = name
|
||||
self.built = False
|
||||
|
||||
if input:
|
||||
if input not in self._graph_namespace:
|
||||
raise Exception('Unknown node/input identifier: ' + input)
|
||||
if input in self._graph_nodes:
|
||||
layer.add_inbound_node(self._graph_nodes[input])
|
||||
elif input in self._graph_inputs:
|
||||
layer.add_inbound_node(self._graph_inputs[input])
|
||||
if inputs:
|
||||
to_merge = []
|
||||
for n in inputs:
|
||||
if n in self._graph_nodes:
|
||||
to_merge.append(self._graph_nodes[n])
|
||||
elif n in self._graph_inputs:
|
||||
to_merge.append(self._graph_inputs[n])
|
||||
else:
|
||||
raise Exception('Unknown identifier: ' + n)
|
||||
merge = Merge(to_merge, mode=merge_mode,
|
||||
concat_axis=concat_axis, dot_axes=dot_axes,
|
||||
name='merge_inputs_for_' + name)
|
||||
layer.add_inbound_node(merge)
|
||||
self._graph_nodes[name] = layer
|
||||
self._graph_node_config.append({'name': name,
|
||||
'input': input,
|
||||
'inputs': inputs,
|
||||
'merge_mode': merge_mode,
|
||||
'concat_axis': concat_axis,
|
||||
'dot_axes': dot_axes,
|
||||
'create_output': create_output})
|
||||
if create_output:
|
||||
self.add_output(name, input=name)
|
||||
|
||||
def add_shared_node(self, layer, name, inputs=[], merge_mode=None,
|
||||
concat_axis=-1, dot_axes=-1, outputs=[],
|
||||
create_output=False):
|
||||
'''Used to share a same layer across multiple nodes.
|
||||
|
||||
Supposed, for instance, that you want to apply one same `Dense` layer
|
||||
after two different nodes ('node_a' and 'node_b').
|
||||
You can then add the dense layer as a shared node by calling:
|
||||
|
||||
```python
|
||||
model.add_shared_node(my_dense, name='shared_dense', inputs=['node_a', 'node_b'], ...)
|
||||
```
|
||||
|
||||
If you want access to the output of dense(node_a) and dense(node_b) separately,
|
||||
you can add these outputs to the Graph by passing an `outputs` argument:
|
||||
|
||||
```python
|
||||
model.add_shared_node(my_dense, name='shared_dense', inputs=['node_a', 'node_b'],
|
||||
outputs=['dense_output_a', 'dense_outputs_b'])
|
||||
```
|
||||
|
||||
Otherwise you can merge these different outputs via `merge_mode`.
|
||||
In that case you can access the merged output
|
||||
under the identifier `name`.
|
||||
|
||||
# Arguments
|
||||
layer: The layer to be shared across multiple inputs
|
||||
name: Name of the shared node
|
||||
inputs: List of names of input nodes
|
||||
merge_mode: Same meaning as `merge_mode` argument of `add_node()`
|
||||
concat_axis: Same meaning as `concat_axis` argument of `add_node()`
|
||||
dot_axes: Same meaning as `dot_axes` argument of `add_node()`
|
||||
outputs: Used when `merge_mode=None`. Names for the output nodes.
|
||||
create_output: Same meaning as `create_output` argument of `add_node()`.
|
||||
'''
|
||||
if name in self._graph_namespace:
|
||||
raise Exception('Duplicate node identifier: ' + name)
|
||||
self._graph_namespace.add(name)
|
||||
self.built = False
|
||||
|
||||
for o in outputs:
|
||||
if o in self._graph_namespace:
|
||||
raise Exception('Duplicate node identifier: ' + o)
|
||||
if merge_mode:
|
||||
if merge_mode not in {'sum', 'ave', 'mul', 'dot', 'cos', 'concat'}:
|
||||
raise Exception('Invalid merge mode:', merge_mode)
|
||||
input_layers = []
|
||||
for i in range(len(inputs)):
|
||||
input = inputs[i]
|
||||
if input in self._graph_nodes:
|
||||
n = self._graph_nodes[input]
|
||||
input_layers.append(n)
|
||||
elif input in self._graph_inputs:
|
||||
n = self._graph_inputs[input]
|
||||
input_layers.append(n)
|
||||
else:
|
||||
raise Exception('Unknown identifier: ' + input)
|
||||
|
||||
created_node_indices = []
|
||||
for input_layer in input_layers:
|
||||
created_node_indices.append(len(layer.inbound_nodes))
|
||||
layer.add_inbound_node(input_layer)
|
||||
|
||||
if merge_mode:
|
||||
layer.name = 'input_for_' + name
|
||||
# collect all output nodes of layer and merge them into a single output
|
||||
merge = Merge([layer for _ in range(len(inputs))],
|
||||
mode=merge_mode,
|
||||
concat_axis=concat_axis, dot_axes=dot_axes,
|
||||
node_indices=created_node_indices,
|
||||
name=name)
|
||||
self._graph_nodes[name] = merge
|
||||
if create_output:
|
||||
self.add_output(name, input=name)
|
||||
else:
|
||||
layer.name = name
|
||||
# create one new layer per output node of layer,
|
||||
# and add them to the Graph with their own identifiers
|
||||
if len(outputs) != len(inputs):
|
||||
raise Exception('When using merge_mode=None, '
|
||||
'you should provide a list of '
|
||||
'output names (`output` argument) '
|
||||
'the same size as `input`.')
|
||||
for i in range(len(outputs)):
|
||||
output_layer_name = outputs[i]
|
||||
output_layer = Layer(name=output_layer_name)
|
||||
output_layer.add_inbound_node(layer, created_node_indices[i])
|
||||
self._graph_namespace.add(output_layer_name)
|
||||
self._graph_nodes[output_layer_name] = output_layer
|
||||
if create_output:
|
||||
self.add_output(output_layer_name, input=output_layer_name)
|
||||
|
||||
self._graph_node_config.append({'name': name,
|
||||
'layer': {
|
||||
'config': layer.get_config(),
|
||||
'class_name': layer.__class__.__name__,
|
||||
},
|
||||
'inputs': inputs,
|
||||
'merge_mode': merge_mode,
|
||||
'concat_axis': concat_axis,
|
||||
'dot_axes': dot_axes,
|
||||
'outputs': outputs,
|
||||
'create_output': create_output if merge_mode else False})
|
||||
self._graph_shared_nodes_names.append(name)
|
||||
|
||||
def add_output(self, name, input=None, inputs=[],
|
||||
merge_mode='concat', concat_axis=-1, dot_axes=-1):
|
||||
'''Adds an output to the graph.
|
||||
|
||||
This output can merge several node outputs into a single output.
|
||||
|
||||
# Arguments
|
||||
name: name of the output.
|
||||
input: when connecting the layer to a single input,
|
||||
this is the name of the incoming node.
|
||||
inputs: when connecting the layer to multiple inputs,
|
||||
this is a list of names of incoming nodes.
|
||||
merge_mode: one of {concat, sum, dot, ave, mul}
|
||||
concat_axis: when `merge_mode=='concat'`, this is the
|
||||
input concatenation axis.
|
||||
dot_axes: when `merge_mode='dot'`,
|
||||
this is the contraction axes specification;
|
||||
see the `Merge layer for details.
|
||||
'''
|
||||
if name not in self._graph_namespace:
|
||||
self._graph_namespace.add(name)
|
||||
if name in self._graph_outputs:
|
||||
raise Exception('Duplicate output identifier:', name)
|
||||
self.built = False
|
||||
|
||||
if input:
|
||||
if input in self._graph_nodes:
|
||||
layer = self._graph_nodes[input]
|
||||
elif input in self._graph_inputs:
|
||||
layer = self._graph_inputs[input]
|
||||
else:
|
||||
raise Exception('Unknown node/input identifier: ' + input)
|
||||
if layer.name == name:
|
||||
self._graph_outputs[name] = layer
|
||||
else:
|
||||
layer.name = name
|
||||
self._graph_outputs[name] = layer
|
||||
if inputs:
|
||||
to_merge = []
|
||||
for n in inputs:
|
||||
if n not in self._graph_nodes:
|
||||
raise Exception('Unknown identifier: ' + n)
|
||||
to_merge.append(self._graph_nodes[n])
|
||||
merge = Merge(to_merge, mode=merge_mode,
|
||||
concat_axis=concat_axis, dot_axes=dot_axes,
|
||||
name=name)
|
||||
self._graph_outputs[name] = merge
|
||||
|
||||
self._graph_output_config.append({'name': name,
|
||||
'input': input,
|
||||
'inputs': inputs,
|
||||
'merge_mode': merge_mode,
|
||||
'concat_axis': concat_axis,
|
||||
'dot_axes': dot_axes})
|
||||
|
||||
def _get_x(self, data):
|
||||
x = []
|
||||
for key in self._graph_inputs.keys():
|
||||
if key not in data:
|
||||
raise Exception('Expected to be provided an array '
|
||||
'(in dict argument `data`) for input "' +
|
||||
key + '".')
|
||||
x.append(data[key])
|
||||
return x
|
||||
|
||||
def _get_y(self, data):
|
||||
y = []
|
||||
for key in self._graph_outputs.keys():
|
||||
if key not in data:
|
||||
raise Exception('Expected to be provided an array '
|
||||
'(in dict argument `data`) for output "' +
|
||||
key + '".')
|
||||
y.append(data[key])
|
||||
return y
|
||||
|
||||
def fit(self, data, batch_size=32, nb_epoch=10, verbose=1, callbacks=[],
|
||||
validation_split=0., validation_data=None, shuffle=True,
|
||||
class_weight=None, sample_weight=None, **kwargs):
|
||||
'''Trains the model for a fixed number of epochs.
|
||||
|
||||
Returns a history object. Its `history` attribute is a record of
|
||||
training loss values at successive epochs,
|
||||
as well as validation loss values (if applicable).
|
||||
|
||||
# Arguments
|
||||
data: dictionary mapping input names and outputs names to
|
||||
appropriate Numpy arrays. All arrays should contain
|
||||
the same number of samples.
|
||||
batch_size: int. Number of samples per gradient update.
|
||||
nb_epoch: int.
|
||||
verbose: 0 for no logging to stdout,
|
||||
1 for progress bar logging, 2 for one log line per epoch.
|
||||
callbacks: `keras.callbacks.Callback` list. List of callbacks
|
||||
to apply during training. See [callbacks](callbacks.md).
|
||||
validation_split: float (0. < x < 1). Fraction of the data to
|
||||
use as held-out validation data.
|
||||
validation_data: dictionary mapping input names and outputs names
|
||||
to appropriate Numpy arrays to be used as
|
||||
held-out validation data.
|
||||
All arrays should contain the same number of samples.
|
||||
Will override validation_split.
|
||||
shuffle: boolean. Whether to shuffle the samples at each epoch.
|
||||
class_weight: dictionary mapping output names to
|
||||
class weight dictionaries.
|
||||
sample_weight: dictionary mapping output names to
|
||||
numpy arrays of sample weights.
|
||||
'''
|
||||
if 'show_accuracy' in kwargs:
|
||||
kwargs.pop('show_accuracy')
|
||||
warnings.warn('The "show_accuracy" argument is deprecated, '
|
||||
'instead you should pass the "accuracy" metric to '
|
||||
'the model at compile time:\n'
|
||||
'`model.compile(optimizer, loss, '
|
||||
'metrics=["accuracy"])`')
|
||||
if kwargs:
|
||||
raise Exception('Received unknown keyword arguments: ' +
|
||||
str(kwargs))
|
||||
x = self._get_x(data)
|
||||
y = self._get_y(data)
|
||||
|
||||
if type(validation_data) is tuple:
|
||||
raise Exception('Cannot used sample_weight with '
|
||||
'validation data with legacy Graph model. '
|
||||
'validation_data should be a dictionary.')
|
||||
if validation_data:
|
||||
val_x = self._get_x(validation_data)
|
||||
val_y = self._get_y(validation_data)
|
||||
validation_data = (val_x, val_y)
|
||||
return super(Graph, self).fit(x, y,
|
||||
batch_size=batch_size,
|
||||
nb_epoch=nb_epoch,
|
||||
verbose=verbose,
|
||||
callbacks=callbacks,
|
||||
validation_split=validation_split,
|
||||
validation_data=validation_data,
|
||||
shuffle=shuffle,
|
||||
class_weight=class_weight,
|
||||
sample_weight=sample_weight)
|
||||
|
||||
def evaluate(self, data, batch_size=128,
|
||||
verbose=0, sample_weight={}, **kwargs):
|
||||
'''Computes the loss on some input data, batch by batch.
|
||||
|
||||
Returns the scalar test loss over the data,
|
||||
or a list of metrics values (starting with the test loss)
|
||||
if applicable.
|
||||
|
||||
Arguments: see `fit` method.
|
||||
'''
|
||||
if 'show_accuracy' in kwargs:
|
||||
kwargs.pop('show_accuracy')
|
||||
warnings.warn('The "show_accuracy" argument is deprecated, '
|
||||
'instead you should pass the "accuracy" metric to '
|
||||
'the model at compile time:\n'
|
||||
'`model.compile(optimizer, loss, '
|
||||
'metrics=["accuracy"])`')
|
||||
if kwargs:
|
||||
raise Exception('Received unknown keyword arguments: ' +
|
||||
str(kwargs))
|
||||
x = self._get_x(data)
|
||||
y = self._get_y(data)
|
||||
return super(Graph, self).evaluate(x, y,
|
||||
batch_size=batch_size,
|
||||
verbose=verbose,
|
||||
sample_weight=sample_weight)
|
||||
|
||||
def predict(self, data, batch_size=128, verbose=0):
|
||||
'''Generates output predictions for the input samples
|
||||
batch by batch.
|
||||
|
||||
Arguments: see `fit` method.
|
||||
'''
|
||||
x = self._get_x(data)
|
||||
output_list = super(Graph, self).predict(x, batch_size=batch_size,
|
||||
verbose=verbose)
|
||||
if not isinstance(output_list, list):
|
||||
output_list = [output_list]
|
||||
return dict(zip(self._graph_outputs, output_list))
|
||||
|
||||
def train_on_batch(self, data,
|
||||
class_weight={},
|
||||
sample_weight={}, **kwargs):
|
||||
'''Single gradient update on a batch of samples.
|
||||
|
||||
Returns the scalar train loss over the data,
|
||||
or a list of metrics values (starting with the test loss)
|
||||
if applicable.
|
||||
|
||||
Arguments: see `fit` method.
|
||||
'''
|
||||
if 'accuracy' in kwargs:
|
||||
kwargs.pop('accuracy')
|
||||
warnings.warn('The "accuracy" argument is deprecated, '
|
||||
'instead you should pass the "accuracy" metric to '
|
||||
'the model at compile time:\n'
|
||||
'`model.compile(optimizer, loss, '
|
||||
'metrics=["accuracy"])`')
|
||||
if kwargs:
|
||||
raise Exception('Received unknown keyword arguments: ' +
|
||||
str(kwargs))
|
||||
x = self._get_x(data)
|
||||
y = self._get_y(data)
|
||||
return super(Graph, self).train_on_batch(x, y,
|
||||
sample_weight=sample_weight,
|
||||
class_weight=class_weight)
|
||||
|
||||
def test_on_batch(self, data, sample_weight={}, **kwargs):
|
||||
'''Test the network on a single batch of samples.
|
||||
|
||||
Returns the scalar test loss over the data,
|
||||
or a list of metrics values (starting with the test loss)
|
||||
if applicable.
|
||||
|
||||
Arguments: see `fit` method.
|
||||
'''
|
||||
if 'accuracy' in kwargs:
|
||||
kwargs.pop('accuracy')
|
||||
warnings.warn('The "accuracy" argument is deprecated, '
|
||||
'instead you should pass the "accuracy" metric to '
|
||||
'the model at compile time:\n'
|
||||
'`model.compile(optimizer, loss, '
|
||||
'metrics=["accuracy"])`')
|
||||
if kwargs:
|
||||
raise Exception('Received unknown keyword arguments: ' +
|
||||
str(kwargs))
|
||||
x = self._get_x(data)
|
||||
y = self._get_y(data)
|
||||
return super(Graph, self).test_on_batch(x, y,
|
||||
sample_weight=sample_weight)
|
||||
|
||||
def predict_on_batch(self, data):
|
||||
output_list = super(Graph, self).predict_on_batch(data)
|
||||
if not isinstance(output_list, list):
|
||||
output_list = [output_list]
|
||||
return dict(zip(self._graph_outputs, output_list))
|
||||
|
||||
def fit_generator(self, generator, samples_per_epoch, nb_epoch,
|
||||
verbose=1, callbacks=[],
|
||||
validation_data=None, nb_val_samples=None,
|
||||
class_weight={},
|
||||
max_q_size=10, **kwargs):
|
||||
'''Fits a model on data generated batch-by-batch by a Python generator.
|
||||
The generator is run in parallel to the model, for efficiency.
|
||||
For instance, this allows you to do real-time data augmentation
|
||||
on images on CPU in parallel to training your model on GPU.
|
||||
|
||||
# Arguments
|
||||
generator: a generator.
|
||||
The output of the generator must be either a tuple
|
||||
of dictionaries `(input_data, sample_weight)`
|
||||
or a dictionary `input_data`
|
||||
(mapping names of inputs and outputs to Numpy arrays).
|
||||
All arrays should contain the same number of samples.
|
||||
The generator is expected to loop over its data
|
||||
indefinitely. An epoch finishes when `samples_per_epoch`
|
||||
samples have been seen by the model.
|
||||
samples_per_epoch: integer, number of samples to process before
|
||||
going to the next epoch.
|
||||
nb_epoch: integer, total number of iterations on the data.
|
||||
verbose: verbosity mode, 0, 1, or 2.
|
||||
callbacks: list of callbacks to be called during training.
|
||||
validation_data: dictionary mapping input names and outputs names
|
||||
to appropriate Numpy arrays to be used as
|
||||
held-out validation data, or a generator yielding such
|
||||
dictionaries. All arrays should contain the same number
|
||||
of samples. If a generator, will be called until more than
|
||||
`nb_val_samples` examples have been generated at the
|
||||
end of every epoch. These examples will then be used
|
||||
as the validation data.
|
||||
nb_val_samples: number of samples to use from validation
|
||||
generator at the end of every epoch.
|
||||
class_weight: dictionary mapping class indices to a weight
|
||||
for the class.
|
||||
|
||||
# Returns
|
||||
A `History` object.
|
||||
|
||||
# Examples
|
||||
|
||||
```python
|
||||
def generate_arrays_from_file(path):
|
||||
while 1:
|
||||
f = open(path)
|
||||
for line in f:
|
||||
# create Numpy arrays of input data
|
||||
# and labels, from each line in the file
|
||||
x1, x2, y = process_line(line)
|
||||
yield ({'input_1': x1, 'input_2': x2, 'output': y})
|
||||
f.close()
|
||||
|
||||
graph.fit_generator(generate_arrays_from_file('/my_file.txt'),
|
||||
samples_per_epoch=10000, nb_epoch=10)
|
||||
```
|
||||
'''
|
||||
if 'show_accuracy' in kwargs:
|
||||
kwargs.pop('show_accuracy')
|
||||
warnings.warn('The "show_accuracy" argument is deprecated, '
|
||||
'instead you should pass the "accuracy" metric to '
|
||||
'the model at compile time:\n'
|
||||
'`model.compile(optimizer, loss, '
|
||||
'metrics=["accuracy"])`')
|
||||
if 'nb_worker' in kwargs:
|
||||
kwargs.pop('nb_worker')
|
||||
warnings.warn('The "nb_worker" argument is deprecated, '
|
||||
'please remove it from your code.')
|
||||
if 'nb_val_worker' in kwargs:
|
||||
kwargs.pop('nb_val_worker')
|
||||
warnings.warn('The "nb_val_worker" argument is deprecated, '
|
||||
'please remove it from your code.')
|
||||
if kwargs:
|
||||
raise Exception('Received unknown keyword arguments: ' +
|
||||
str(kwargs))
|
||||
|
||||
self._train_on_batch = self.train_on_batch
|
||||
self.train_on_batch = super(Graph, self).train_on_batch
|
||||
self._evaluate = self.evaluate
|
||||
self.evaluate = super(Graph, self).evaluate
|
||||
|
||||
if validation_data and type(validation_data) is tuple:
|
||||
raise Exception('Cannot use sample_weight with '
|
||||
'validation_data in legacy Graph model.')
|
||||
if validation_data and type(validation_data) is dict:
|
||||
validation_data = (self._get_x(validation_data),
|
||||
self._get_y(validation_data))
|
||||
|
||||
original_generator = generator
|
||||
|
||||
def fixed_generator():
|
||||
while 1:
|
||||
data = next(original_generator)
|
||||
if type(data) is tuple:
|
||||
data, sample_weight = data
|
||||
x = self._get_x(data)
|
||||
y = self._get_y(data)
|
||||
yield x, y, sample_weight
|
||||
else:
|
||||
x = self._get_x(data)
|
||||
y = self._get_y(data)
|
||||
yield x, y
|
||||
|
||||
generator = fixed_generator()
|
||||
history = super(Graph, self).fit_generator(generator,
|
||||
samples_per_epoch,
|
||||
nb_epoch,
|
||||
verbose=verbose,
|
||||
callbacks=callbacks,
|
||||
validation_data=validation_data,
|
||||
nb_val_samples=nb_val_samples,
|
||||
class_weight=class_weight,
|
||||
max_q_size=max_q_size)
|
||||
self.train_on_batch = self._train_on_batch
|
||||
self.evaluate = self._evaluate
|
||||
return history
|
||||
|
||||
def evaluate_generator(self, generator, val_samples,
|
||||
verbose=1, max_q_size=10, **kwargs):
|
||||
'''Evaluates the model on a generator. The generator should
|
||||
return the same kind of data with every yield as accepted
|
||||
by `evaluate`.
|
||||
|
||||
If `show_accuracy`, it returns a tuple `(loss, accuracy)`,
|
||||
otherwise it returns the loss value.
|
||||
|
||||
Arguments:
|
||||
generator:
|
||||
generator yielding dictionaries of the kind accepted
|
||||
by `evaluate`, or tuples of such dictionaries and
|
||||
associated dictionaries of sample weights.
|
||||
val_samples:
|
||||
total number of samples to generate from `generator`
|
||||
to use in validation.
|
||||
|
||||
Other arguments are the same as for `fit`.
|
||||
'''
|
||||
if 'show_accuracy' in kwargs:
|
||||
kwargs.pop('show_accuracy')
|
||||
warnings.warn('The "show_accuracy" argument is deprecated, '
|
||||
'instead you should pass the "accuracy" metric to '
|
||||
'the model at compile time:\n'
|
||||
'`model.compile(optimizer, loss, '
|
||||
'metrics=["accuracy"])`')
|
||||
if 'verbose' in kwargs:
|
||||
kwargs.pop('verbose')
|
||||
warnings.warn('The "verbose" argument is deprecated.')
|
||||
if kwargs:
|
||||
raise Exception('Received unknown keyword arguments: ' +
|
||||
str(kwargs))
|
||||
|
||||
self._test_on_batch = self.test_on_batch
|
||||
self.test_on_batch = super(Graph, self).test_on_batch
|
||||
|
||||
original_generator = generator
|
||||
|
||||
def fixed_generator():
|
||||
while 1:
|
||||
data = next(original_generator)
|
||||
if type(data) is tuple:
|
||||
data, sample_weight = data
|
||||
x = self._get_x(data)
|
||||
y = self._get_y(data)
|
||||
yield x, y, sample_weight
|
||||
else:
|
||||
x = self._get_x(data)
|
||||
y = self._get_y(data)
|
||||
yield x, y
|
||||
|
||||
generator = fixed_generator()
|
||||
history = super(Graph, self).evaluate_generator(generator,
|
||||
val_samples,
|
||||
max_q_size=max_q_size)
|
||||
self.test_on_batch = self._test_on_batch
|
||||
return history
|
||||
|
||||
# get_weights, set_weights: inherited
|
||||
def get_config(self):
|
||||
config = {'input_config': self._graph_input_config,
|
||||
'node_config': self._graph_node_config,
|
||||
'output_config': self._graph_output_config}
|
||||
nodes = {}
|
||||
for name, node in self._graph_nodes.items():
|
||||
nodes[name] = {'class_name': node.__class__.__name__,
|
||||
'config': node.get_config()}
|
||||
if name in self._graph_shared_nodes_names:
|
||||
nodes[name]['shared'] = True
|
||||
config['nodes'] = nodes
|
||||
return copy.deepcopy(config)
|
||||
|
||||
@classmethod
|
||||
def from_config(cls, config):
|
||||
# TODO: test legacy support
|
||||
from keras.utils.layer_utils import layer_from_config
|
||||
|
||||
def normalize_legacy_config(conf):
|
||||
if 'class_name' not in conf:
|
||||
class_name = conf['name']
|
||||
name = conf.get('custom_name')
|
||||
conf['name'] = name
|
||||
new_config = {
|
||||
'class_name': class_name,
|
||||
'config': conf,
|
||||
}
|
||||
return new_config
|
||||
return conf
|
||||
|
||||
graph = cls()
|
||||
inputs = config.get('input_config')
|
||||
for input in inputs:
|
||||
graph.add_input(**input)
|
||||
|
||||
nodes = config.get('node_config')
|
||||
for node in nodes:
|
||||
layer_config = config['nodes'][node['name']]
|
||||
layer_config = normalize_legacy_config(layer_config)
|
||||
if 'layer' in node:
|
||||
# for add_shared_node
|
||||
node['layer'] = layer_from_config(node['layer'])
|
||||
else:
|
||||
layer = layer_from_config(layer_config)
|
||||
node['layer'] = layer
|
||||
|
||||
node['create_output'] = False # outputs will be added below
|
||||
if layer_config.get('shared'):
|
||||
graph.add_shared_node(**node)
|
||||
else:
|
||||
graph.add_node(**node)
|
||||
|
||||
outputs = config.get('output_config')
|
||||
for output in outputs:
|
||||
graph.add_output(**output)
|
||||
return graph
|
||||
|
||||
def load_weights(self, fname):
|
||||
if not self.built:
|
||||
self.build()
|
||||
super(Graph, self).load_weights(fname)
|
||||
@@ -0,0 +1,84 @@
|
||||
import numpy as np
|
||||
from . import backend as K
|
||||
|
||||
|
||||
def binary_accuracy(y_true, y_pred):
|
||||
return K.mean(K.equal(y_true, K.round(y_pred)))
|
||||
|
||||
|
||||
def categorical_accuracy(y_true, y_pred):
|
||||
return K.mean(K.equal(K.argmax(y_true, axis=-1),
|
||||
K.argmax(y_pred, axis=-1)))
|
||||
|
||||
|
||||
def sparse_categorical_accuracy(y_true, y_pred):
|
||||
return K.mean(K.equal(K.max(y_true, axis=-1),
|
||||
K.cast(K.argmax(y_pred, axis=-1), K.floatx())))
|
||||
|
||||
|
||||
def mean_squared_error(y_true, y_pred):
|
||||
return K.mean(K.square(y_pred - y_true))
|
||||
|
||||
|
||||
def mean_absolute_error(y_true, y_pred):
|
||||
return K.mean(K.abs(y_pred - y_true))
|
||||
|
||||
|
||||
def mean_absolute_percentage_error(y_true, y_pred):
|
||||
diff = K.abs((y_true - y_pred) / K.clip(K.abs(y_true), K.epsilon(), np.inf))
|
||||
return 100. * K.mean(diff)
|
||||
|
||||
|
||||
def mean_squared_logarithmic_error(y_true, y_pred):
|
||||
first_log = K.log(K.clip(y_pred, K.epsilon(), np.inf) + 1.)
|
||||
second_log = K.log(K.clip(y_true, K.epsilon(), np.inf) + 1.)
|
||||
return K.mean(K.square(first_log - second_log))
|
||||
|
||||
|
||||
def squared_hinge(y_true, y_pred):
|
||||
return K.mean(K.square(K.maximum(1. - y_true * y_pred, 0.)))
|
||||
|
||||
|
||||
def hinge(y_true, y_pred):
|
||||
return K.mean(K.maximum(1. - y_true * y_pred, 0.))
|
||||
|
||||
|
||||
def categorical_crossentropy(y_true, y_pred):
|
||||
'''Expects a binary class matrix instead of a vector of scalar classes.
|
||||
'''
|
||||
return K.mean(K.categorical_crossentropy(y_pred, y_true))
|
||||
|
||||
|
||||
def sparse_categorical_crossentropy(y_true, y_pred):
|
||||
'''expects an array of integer classes.
|
||||
Note: labels shape must have the same number of dimensions as output shape.
|
||||
If you get a shape error, add a length-1 dimension to labels.
|
||||
'''
|
||||
return K.mean(K.sparse_categorical_crossentropy(y_pred, y_true))
|
||||
|
||||
|
||||
def binary_crossentropy(y_true, y_pred):
|
||||
return K.mean(K.binary_crossentropy(y_pred, y_true))
|
||||
|
||||
|
||||
def poisson(y_true, y_pred):
|
||||
return K.mean(y_pred - y_true * K.log(y_pred + K.epsilon()))
|
||||
|
||||
|
||||
def cosine_proximity(y_true, y_pred):
|
||||
y_true = K.l2_normalize(y_true, axis=-1)
|
||||
y_pred = K.l2_normalize(y_pred, axis=-1)
|
||||
return -K.mean(y_true * y_pred)
|
||||
|
||||
|
||||
# aliases
|
||||
mse = MSE = mean_squared_error
|
||||
mae = MAE = mean_absolute_error
|
||||
mape = MAPE = mean_absolute_percentage_error
|
||||
msle = MSLE = mean_squared_logarithmic_error
|
||||
cosine = cosine_proximity
|
||||
|
||||
|
||||
from .utils.generic_utils import get_from_module
|
||||
def get(identifier):
|
||||
return get_from_module(identifier, globals(), 'metric')
|
||||
+858
-1688
Diferenças do arquivo suprimidas por serem muito extensas
Carregar Diff
@@ -36,10 +36,24 @@ def categorical_crossentropy(y_true, y_pred):
|
||||
return K.categorical_crossentropy(y_pred, y_true)
|
||||
|
||||
|
||||
def sparse_categorical_crossentropy(y_true, y_pred):
|
||||
'''expects an array of integer classes.
|
||||
Note: labels shape must have the same number of dimensions as output shape.
|
||||
If you get a shape error, add a length-1 dimension to labels.
|
||||
'''
|
||||
return K.sparse_categorical_crossentropy(y_pred, y_true)
|
||||
|
||||
|
||||
def binary_crossentropy(y_true, y_pred):
|
||||
return K.mean(K.binary_crossentropy(y_pred, y_true), axis=-1)
|
||||
|
||||
|
||||
def kullback_leibler_divergence(y_true, y_pred):
|
||||
y_true = K.clip(y_true, K.epsilon(), 1)
|
||||
y_pred = K.clip(y_pred, K.epsilon(), 1)
|
||||
return K.sum(y_true * K.log(y_true / y_pred), axis=-1)
|
||||
|
||||
|
||||
def poisson(y_true, y_pred):
|
||||
return K.mean(y_pred - y_true * K.log(y_pred + K.epsilon()), axis=-1)
|
||||
|
||||
@@ -55,6 +69,7 @@ mse = MSE = mean_squared_error
|
||||
mae = MAE = mean_absolute_error
|
||||
mape = MAPE = mean_absolute_percentage_error
|
||||
msle = MSLE = mean_squared_logarithmic_error
|
||||
kld = KLD = kullback_leibler_divergence
|
||||
cosine = cosine_proximity
|
||||
|
||||
from .utils.generic_utils import get_from_module
|
||||
|
||||
+281
-91
@@ -1,6 +1,5 @@
|
||||
from __future__ import absolute_import
|
||||
from . import backend as K
|
||||
import numpy as np
|
||||
from .utils.generic_utils import get_from_module
|
||||
from six.moves import zip
|
||||
|
||||
@@ -11,8 +10,24 @@ def clip_norm(g, c, n):
|
||||
return g
|
||||
|
||||
|
||||
def kl_divergence(p, p_hat):
|
||||
return p_hat - p + p * K.log(p / p_hat)
|
||||
def optimizer_from_config(config, custom_objects={}):
|
||||
all_classes = {
|
||||
'sgd': SGD,
|
||||
'rmsprop': RMSprop,
|
||||
'adagrad': Adagrad,
|
||||
'adadelta': Adadelta,
|
||||
'adam': Adam,
|
||||
'adamax': Adamax,
|
||||
'nadam': Nadam,
|
||||
}
|
||||
class_name = config['class_name']
|
||||
if class_name in custom_objects:
|
||||
cls = custom_objects[class_name]
|
||||
else:
|
||||
if class_name.lower() not in all_classes:
|
||||
raise ValueError('Optimizer class not found:', class_name)
|
||||
cls = all_classes[class_name.lower()]
|
||||
return cls.from_config(config['config'])
|
||||
|
||||
|
||||
class Optimizer(object):
|
||||
@@ -29,8 +44,14 @@ class Optimizer(object):
|
||||
when their absolute value exceeds this value.
|
||||
'''
|
||||
def __init__(self, **kwargs):
|
||||
allowed_kwargs = {'clipnorm', 'clipvalue'}
|
||||
for k in kwargs:
|
||||
if k not in allowed_kwargs:
|
||||
raise Exception('Unexpected keyword argument '
|
||||
'passed to optimizer: ' + str(k))
|
||||
self.__dict__.update(kwargs)
|
||||
self.updates = []
|
||||
self.weights = []
|
||||
|
||||
def get_state(self):
|
||||
return [K.get_value(u[0]) for u in self.updates]
|
||||
@@ -52,13 +73,53 @@ class Optimizer(object):
|
||||
grads = [K.clip(g, -self.clipvalue, self.clipvalue) for g in grads]
|
||||
return grads
|
||||
|
||||
def set_weights(self, weights):
|
||||
'''Sets the weights of the optimizer, from Numpy arrays.
|
||||
|
||||
Should only be called after computing the gradients
|
||||
(otherwise the optimizer has no weights).
|
||||
|
||||
# Arguments
|
||||
weights: a list of Numpy arrays. The number
|
||||
of arrays and their shape must match
|
||||
number of the dimensions of the weights
|
||||
of the optimizer (i.e. it should match the
|
||||
output of `get_weights`).
|
||||
'''
|
||||
params = self.weights
|
||||
weight_value_tuples = []
|
||||
param_values = K.batch_get_value(params)
|
||||
for pv, p, w in zip(param_values, params, weights):
|
||||
if pv.shape != w.shape:
|
||||
raise Exception('Optimizer weight shape ' +
|
||||
str(pv.shape) +
|
||||
' not compatible with '
|
||||
'provided weight shape ' + str(w.shape))
|
||||
weight_value_tuples.append((p, w))
|
||||
K.batch_set_value(weight_value_tuples)
|
||||
|
||||
def get_weights(self):
|
||||
'''Returns the current weights of the optimizer,
|
||||
as a list of numpy arrays.
|
||||
'''
|
||||
return K.batch_get_value(self.weights)
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__}
|
||||
config = {}
|
||||
if hasattr(self, 'clipnorm'):
|
||||
config['clipnorm'] = self.clipnorm
|
||||
if hasattr(self, 'clipvalue'):
|
||||
config['clipvalue'] = self.clipvalue
|
||||
return config
|
||||
|
||||
@classmethod
|
||||
def from_config(cls, config):
|
||||
return cls(**config)
|
||||
|
||||
|
||||
class SGD(Optimizer):
|
||||
'''Stochastic gradient descent, with support for momentum,
|
||||
decay, and Nesterov momentum.
|
||||
learning rate decay, and Nesterov momentum.
|
||||
|
||||
# Arguments
|
||||
lr: float >= 0. Learning rate.
|
||||
@@ -66,8 +127,8 @@ class SGD(Optimizer):
|
||||
decay: float >= 0. Learning rate decay over each update.
|
||||
nesterov: boolean. Whether to apply Nesterov momentum.
|
||||
'''
|
||||
def __init__(self, lr=0.01, momentum=0., decay=0., nesterov=False,
|
||||
*args, **kwargs):
|
||||
def __init__(self, lr=0.01, momentum=0., decay=0.,
|
||||
nesterov=False, **kwargs):
|
||||
super(SGD, self).__init__(**kwargs)
|
||||
self.__dict__.update(locals())
|
||||
self.iterations = K.variable(0.)
|
||||
@@ -77,35 +138,45 @@ class SGD(Optimizer):
|
||||
|
||||
def get_updates(self, params, constraints, loss):
|
||||
grads = self.get_gradients(loss, params)
|
||||
lr = self.lr * (1.0 / (1.0 + self.decay * self.iterations))
|
||||
self.updates = [(self.iterations, self.iterations + 1.)]
|
||||
lr = self.lr * (1. / (1. + self.decay * self.iterations))
|
||||
self.updates = [K.update_add(self.iterations, 1)]
|
||||
|
||||
for p, g, c in zip(params, grads, constraints):
|
||||
m = K.variable(np.zeros(K.get_value(p).shape)) # momentum
|
||||
# momentum
|
||||
shapes = [x.shape for x in K.batch_get_value(params)]
|
||||
moments = [K.zeros(shape) for shape in shapes]
|
||||
self.weights = [self.iterations] + moments
|
||||
for p, g, m in zip(params, grads, moments):
|
||||
v = self.momentum * m - lr * g # velocity
|
||||
self.updates.append((m, v))
|
||||
self.updates.append(K.update(m, v))
|
||||
|
||||
if self.nesterov:
|
||||
new_p = p + self.momentum * v - lr * g
|
||||
else:
|
||||
new_p = p + v
|
||||
|
||||
self.updates.append((p, c(new_p))) # apply constraints
|
||||
# apply constraints
|
||||
if p in constraints:
|
||||
c = constraints[p]
|
||||
new_p = c(new_p)
|
||||
|
||||
self.updates.append(K.update(p, new_p))
|
||||
return self.updates
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"lr": float(K.get_value(self.lr)),
|
||||
"momentum": float(K.get_value(self.momentum)),
|
||||
"decay": float(K.get_value(self.decay)),
|
||||
"nesterov": self.nesterov}
|
||||
config = {'lr': float(K.get_value(self.lr)),
|
||||
'momentum': float(K.get_value(self.momentum)),
|
||||
'decay': float(K.get_value(self.decay)),
|
||||
'nesterov': self.nesterov}
|
||||
base_config = super(SGD, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class RMSprop(Optimizer):
|
||||
'''RMSProp optimizer.
|
||||
|
||||
It is recommended to leave the parameters of this optimizer
|
||||
at their default values.
|
||||
at their default values
|
||||
(except the learning rate, which can be freely tuned).
|
||||
|
||||
This optimizer is usually a good choice for recurrent
|
||||
neural networks.
|
||||
@@ -115,7 +186,7 @@ class RMSprop(Optimizer):
|
||||
rho: float >= 0.
|
||||
epsilon: float >= 0. Fuzz factor.
|
||||
'''
|
||||
def __init__(self, lr=0.001, rho=0.9, epsilon=1e-6, *args, **kwargs):
|
||||
def __init__(self, lr=0.001, rho=0.9, epsilon=1e-8, **kwargs):
|
||||
super(RMSprop, self).__init__(**kwargs)
|
||||
self.__dict__.update(locals())
|
||||
self.lr = K.variable(lr)
|
||||
@@ -123,23 +194,30 @@ class RMSprop(Optimizer):
|
||||
|
||||
def get_updates(self, params, constraints, loss):
|
||||
grads = self.get_gradients(loss, params)
|
||||
accumulators = [K.variable(np.zeros(K.get_value(p).shape)) for p in params]
|
||||
shapes = [x.shape for x in K.batch_get_value(params)]
|
||||
accumulators = [K.zeros(shape) for shape in shapes]
|
||||
self.weights = accumulators
|
||||
self.updates = []
|
||||
|
||||
for p, g, a, c in zip(params, grads, accumulators, constraints):
|
||||
for p, g, a in zip(params, grads, accumulators):
|
||||
# update accumulator
|
||||
new_a = self.rho * a + (1 - self.rho) * K.square(g)
|
||||
self.updates.append((a, new_a))
|
||||
new_a = self.rho * a + (1. - self.rho) * K.square(g)
|
||||
self.updates.append(K.update(a, new_a))
|
||||
new_p = p - self.lr * g / (K.sqrt(new_a) + self.epsilon)
|
||||
|
||||
new_p = p - self.lr * g / K.sqrt(new_a + self.epsilon)
|
||||
self.updates.append((p, c(new_p))) # apply constraints
|
||||
# apply constraints
|
||||
if p in constraints:
|
||||
c = constraints[p]
|
||||
new_p = c(new_p)
|
||||
self.updates.append(K.update(p, new_p))
|
||||
return self.updates
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"lr": float(K.get_value(self.lr)),
|
||||
"rho": float(K.get_value(self.rho)),
|
||||
"epsilon": self.epsilon}
|
||||
config = {'lr': float(K.get_value(self.lr)),
|
||||
'rho': float(K.get_value(self.rho)),
|
||||
'epsilon': self.epsilon}
|
||||
base_config = super(RMSprop, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class Adagrad(Optimizer):
|
||||
@@ -152,27 +230,34 @@ class Adagrad(Optimizer):
|
||||
lr: float >= 0. Learning rate.
|
||||
epsilon: float >= 0.
|
||||
'''
|
||||
def __init__(self, lr=0.01, epsilon=1e-6, *args, **kwargs):
|
||||
def __init__(self, lr=0.01, epsilon=1e-8, **kwargs):
|
||||
super(Adagrad, self).__init__(**kwargs)
|
||||
self.__dict__.update(locals())
|
||||
self.lr = K.variable(lr)
|
||||
|
||||
def get_updates(self, params, constraints, loss):
|
||||
grads = self.get_gradients(loss, params)
|
||||
accumulators = [K.variable(np.zeros(K.get_value(p).shape)) for p in params]
|
||||
shapes = [x.shape for x in K.batch_get_value(params)]
|
||||
accumulators = [K.zeros(shape) for shape in shapes]
|
||||
self.weights = accumulators
|
||||
self.updates = []
|
||||
|
||||
for p, g, a, c in zip(params, grads, accumulators, constraints):
|
||||
for p, g, a in zip(params, grads, accumulators):
|
||||
new_a = a + K.square(g) # update accumulator
|
||||
self.updates.append((a, new_a))
|
||||
new_p = p - self.lr * g / K.sqrt(new_a + self.epsilon)
|
||||
self.updates.append((p, c(new_p))) # apply constraints
|
||||
self.updates.append(K.update(a, new_a))
|
||||
new_p = p - self.lr * g / (K.sqrt(new_a) + self.epsilon)
|
||||
# apply constraints
|
||||
if p in constraints:
|
||||
c = constraints[p]
|
||||
new_p = c(new_p)
|
||||
self.updates.append(K.update(p, new_p))
|
||||
return self.updates
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"lr": float(K.get_value(self.lr)),
|
||||
"epsilon": self.epsilon}
|
||||
config = {'lr': float(K.get_value(self.lr)),
|
||||
'epsilon': self.epsilon}
|
||||
base_config = super(Adagrad, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class Adadelta(Optimizer):
|
||||
@@ -182,46 +267,53 @@ class Adadelta(Optimizer):
|
||||
at their default values.
|
||||
|
||||
# Arguments
|
||||
lr: float >= 0. Learning rate. It is recommended to leave it at the default value.
|
||||
lr: float >= 0. Learning rate.
|
||||
It is recommended to leave it at the default value.
|
||||
rho: float >= 0.
|
||||
epsilon: float >= 0. Fuzz factor.
|
||||
|
||||
# References
|
||||
- [Adadelta - an adaptive learning rate method](http://arxiv.org/abs/1212.5701)
|
||||
'''
|
||||
def __init__(self, lr=1.0, rho=0.95, epsilon=1e-6, *args, **kwargs):
|
||||
def __init__(self, lr=1.0, rho=0.95, epsilon=1e-8, **kwargs):
|
||||
super(Adadelta, self).__init__(**kwargs)
|
||||
self.__dict__.update(locals())
|
||||
self.lr = K.variable(lr)
|
||||
|
||||
def get_updates(self, params, constraints, loss):
|
||||
grads = self.get_gradients(loss, params)
|
||||
accumulators = [K.variable(np.zeros(K.get_value(p).shape)) for p in params]
|
||||
delta_accumulators = [K.variable(np.zeros(K.get_value(p).shape)) for p in params]
|
||||
shapes = [x.shape for x in K.batch_get_value(params)]
|
||||
accumulators = [K.zeros(shape) for shape in shapes]
|
||||
delta_accumulators = [K.zeros(shape) for shape in shapes]
|
||||
self.weights = accumulators + delta_accumulators
|
||||
self.updates = []
|
||||
|
||||
for p, g, a, d_a, c in zip(params, grads, accumulators,
|
||||
delta_accumulators, constraints):
|
||||
for p, g, a, d_a in zip(params, grads, accumulators, delta_accumulators):
|
||||
# update accumulator
|
||||
new_a = self.rho * a + (1 - self.rho) * K.square(g)
|
||||
self.updates.append((a, new_a))
|
||||
new_a = self.rho * a + (1. - self.rho) * K.square(g)
|
||||
self.updates.append(K.update(a, new_a))
|
||||
|
||||
# use the new accumulator and the *old* delta_accumulator
|
||||
update = g * K.sqrt(d_a + self.epsilon) / K.sqrt(new_a + self.epsilon)
|
||||
|
||||
new_p = p - self.lr * update
|
||||
self.updates.append((p, c(new_p))) # apply constraints
|
||||
# apply constraints
|
||||
if p in constraints:
|
||||
c = constraints[p]
|
||||
new_p = c(new_p)
|
||||
self.updates.append(K.update(p, new_p))
|
||||
|
||||
# update delta_accumulator
|
||||
new_d_a = self.rho * d_a + (1 - self.rho) * K.square(update)
|
||||
self.updates.append((d_a, new_d_a))
|
||||
self.updates.append(K.update(d_a, new_d_a))
|
||||
return self.updates
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"lr": float(K.get_value(self.lr)),
|
||||
"rho": self.rho,
|
||||
"epsilon": self.epsilon}
|
||||
config = {'lr': float(K.get_value(self.lr)),
|
||||
'rho': self.rho,
|
||||
'epsilon': self.epsilon}
|
||||
base_config = super(Adadelta, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class Adam(Optimizer):
|
||||
@@ -237,8 +329,8 @@ class Adam(Optimizer):
|
||||
# References
|
||||
- [Adam - A Method for Stochastic Optimization](http://arxiv.org/abs/1412.6980v8)
|
||||
'''
|
||||
def __init__(self, lr=0.001, beta_1=0.9, beta_2=0.999, epsilon=1e-8,
|
||||
*args, **kwargs):
|
||||
def __init__(self, lr=0.001, beta_1=0.9, beta_2=0.999,
|
||||
epsilon=1e-8, **kwargs):
|
||||
super(Adam, self).__init__(**kwargs)
|
||||
self.__dict__.update(locals())
|
||||
self.iterations = K.variable(0)
|
||||
@@ -248,32 +340,39 @@ class Adam(Optimizer):
|
||||
|
||||
def get_updates(self, params, constraints, loss):
|
||||
grads = self.get_gradients(loss, params)
|
||||
self.updates = [(self.iterations, self.iterations+1.)]
|
||||
self.updates = [K.update_add(self.iterations, 1)]
|
||||
|
||||
t = self.iterations + 1
|
||||
lr_t = self.lr * K.sqrt(1 - K.pow(self.beta_2, t)) / (1 - K.pow(self.beta_1, t))
|
||||
lr_t = self.lr * K.sqrt(1. - K.pow(self.beta_2, t)) / (1. - K.pow(self.beta_1, t))
|
||||
|
||||
for p, g, c in zip(params, grads, constraints):
|
||||
# zero init of moment
|
||||
m = K.variable(np.zeros(K.get_value(p).shape))
|
||||
# zero init of velocity
|
||||
v = K.variable(np.zeros(K.get_value(p).shape))
|
||||
shapes = [x.shape for x in K.batch_get_value(params)]
|
||||
ms = [K.zeros(shape) for shape in shapes]
|
||||
vs = [K.zeros(shape) for shape in shapes]
|
||||
self.weights = [self.iterations] + ms + vs
|
||||
|
||||
m_t = (self.beta_1 * m) + (1 - self.beta_1) * g
|
||||
v_t = (self.beta_2 * v) + (1 - self.beta_2) * K.square(g)
|
||||
for p, g, m, v in zip(params, grads, ms, vs):
|
||||
m_t = (self.beta_1 * m) + (1. - self.beta_1) * g
|
||||
v_t = (self.beta_2 * v) + (1. - self.beta_2) * K.square(g)
|
||||
p_t = p - lr_t * m_t / (K.sqrt(v_t) + self.epsilon)
|
||||
|
||||
self.updates.append((m, m_t))
|
||||
self.updates.append((v, v_t))
|
||||
self.updates.append((p, c(p_t))) # apply constraints
|
||||
self.updates.append(K.update(m, m_t))
|
||||
self.updates.append(K.update(v, v_t))
|
||||
|
||||
new_p = p_t
|
||||
# apply constraints
|
||||
if p in constraints:
|
||||
c = constraints[p]
|
||||
new_p = c(new_p)
|
||||
self.updates.append(K.update(p, new_p))
|
||||
return self.updates
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"lr": float(K.get_value(self.lr)),
|
||||
"beta_1": float(K.get_value(self.beta_1)),
|
||||
"beta_2": float(K.get_value(self.beta_2)),
|
||||
"epsilon": self.epsilon}
|
||||
config = {'lr': float(K.get_value(self.lr)),
|
||||
'beta_1': float(K.get_value(self.beta_1)),
|
||||
'beta_2': float(K.get_value(self.beta_2)),
|
||||
'epsilon': self.epsilon}
|
||||
base_config = super(Adam, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class Adamax(Optimizer):
|
||||
@@ -290,43 +389,133 @@ class Adamax(Optimizer):
|
||||
# References
|
||||
- [Adam - A Method for Stochastic Optimization](http://arxiv.org/abs/1412.6980v8)
|
||||
'''
|
||||
def __init__(self, lr=0.002, beta_1=0.9, beta_2=0.999, epsilon=1e-8,
|
||||
*args, **kwargs):
|
||||
def __init__(self, lr=0.002, beta_1=0.9, beta_2=0.999,
|
||||
epsilon=1e-8, **kwargs):
|
||||
super(Adamax, self).__init__(**kwargs)
|
||||
self.__dict__.update(locals())
|
||||
self.iterations = K.variable(0)
|
||||
self.iterations = K.variable(0.)
|
||||
self.lr = K.variable(lr)
|
||||
self.beta_1 = K.variable(beta_1)
|
||||
self.beta_2 = K.variable(beta_2)
|
||||
|
||||
def get_updates(self, params, constraints, loss):
|
||||
grads = self.get_gradients(loss, params)
|
||||
self.updates = [(self.iterations, self.iterations+1.)]
|
||||
self.updates = [K.update_add(self.iterations, 1)]
|
||||
|
||||
t = self.iterations + 1
|
||||
lr_t = self.lr / (1 - K.pow(self.beta_1, t))
|
||||
lr_t = self.lr / (1. - K.pow(self.beta_1, t))
|
||||
|
||||
for p, g, c in zip(params, grads, constraints):
|
||||
# zero init of 1st moment
|
||||
m = K.variable(np.zeros(K.get_value(p).shape))
|
||||
# zero init of exponentially weighted infinity norm
|
||||
u = K.variable(np.zeros(K.get_value(p).shape))
|
||||
shapes = [x.shape for x in K.batch_get_value(params)]
|
||||
# zero init of 1st moment
|
||||
ms = [K.zeros(shape) for shape in shapes]
|
||||
# zero init of exponentially weighted infinity norm
|
||||
us = [K.zeros(shape) for shape in shapes]
|
||||
self.weights = [self.iterations] + ms + us
|
||||
|
||||
m_t = (self.beta_1 * m) + (1 - self.beta_1) * g
|
||||
for p, g, m, u in zip(params, grads, ms, us):
|
||||
|
||||
m_t = (self.beta_1 * m) + (1. - self.beta_1) * g
|
||||
u_t = K.maximum(self.beta_2 * u, K.abs(g))
|
||||
p_t = p - lr_t * m_t / (u_t + self.epsilon)
|
||||
|
||||
self.updates.append((m, m_t))
|
||||
self.updates.append((u, u_t))
|
||||
self.updates.append((p, c(p_t))) # apply constraints
|
||||
self.updates.append(K.update(m, m_t))
|
||||
self.updates.append(K.update(u, u_t))
|
||||
|
||||
new_p = p_t
|
||||
# apply constraints
|
||||
if p in constraints:
|
||||
c = constraints[p]
|
||||
new_p = c(new_p)
|
||||
self.updates.append(K.update(p, new_p))
|
||||
return self.updates
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"lr": float(K.get_value(self.lr)),
|
||||
"beta_1": float(K.get_value(self.beta_1)),
|
||||
"beta_2": float(K.get_value(self.beta_2)),
|
||||
"epsilon": self.epsilon}
|
||||
config = {'lr': float(K.get_value(self.lr)),
|
||||
'beta_1': float(K.get_value(self.beta_1)),
|
||||
'beta_2': float(K.get_value(self.beta_2)),
|
||||
'epsilon': self.epsilon}
|
||||
base_config = super(Adamax, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
class Nadam(Optimizer):
|
||||
'''
|
||||
Nesterov Adam optimizer: Much like Adam is essentially RMSprop with momentum,
|
||||
Nadam is Adam RMSprop with Nesterov momentum.
|
||||
|
||||
Default parameters follow those provided in the paper.
|
||||
It is recommended to leave the parameters of this optimizer
|
||||
at their default values.
|
||||
|
||||
# Arguments
|
||||
lr: float >= 0. Learning rate.
|
||||
beta_1/beta_2: floats, 0 < beta < 1. Generally close to 1.
|
||||
epsilon: float >= 0. Fuzz factor.
|
||||
|
||||
# References
|
||||
- [Nadam report](http://cs229.stanford.edu/proj2015/054_report.pdf)
|
||||
- [On the importance of initialization and momentum in deep learning](http://www.cs.toronto.edu/~fritz/absps/momentum.pdf)
|
||||
'''
|
||||
def __init__(self, lr=0.002, beta_1=0.9, beta_2=0.999,
|
||||
epsilon=1e-8, schedule_decay=0.004, **kwargs):
|
||||
super(Nadam, self).__init__(**kwargs)
|
||||
self.__dict__.update(locals())
|
||||
self.iterations = K.variable(0.)
|
||||
self.m_schedule = K.variable(1.)
|
||||
self.lr = K.variable(lr)
|
||||
self.beta_1 = K.variable(beta_1)
|
||||
self.beta_2 = K.variable(beta_2)
|
||||
self.schedule_decay = schedule_decay
|
||||
|
||||
def get_updates(self, params, constraints, loss):
|
||||
grads = self.get_gradients(loss, params)
|
||||
self.updates = [K.update_add(self.iterations, 1)]
|
||||
|
||||
t = self.iterations + 1
|
||||
|
||||
# Due to the recommendations in [2], i.e. warming momentum schedule
|
||||
momentum_cache_t = self.beta_1 * (1. - 0.5 * (K.pow(0.96, t * self.schedule_decay)))
|
||||
momentum_cache_t_1 = self.beta_1 * (1. - 0.5 * (K.pow(0.96, (t + 1) * self.schedule_decay)))
|
||||
m_schedule_new = self.m_schedule * momentum_cache_t
|
||||
m_schedule_next = self.m_schedule * momentum_cache_t * momentum_cache_t_1
|
||||
self.updates.append((self.m_schedule, m_schedule_new))
|
||||
|
||||
shapes = [x.shape for x in K.batch_get_value(params)]
|
||||
ms = [K.zeros(shape) for shape in shapes]
|
||||
vs = [K.zeros(shape) for shape in shapes]
|
||||
|
||||
self.weights = [self.iterations] + ms + vs
|
||||
|
||||
for p, g, m, v in zip(params, grads, ms, vs):
|
||||
# the following equations given in [1]
|
||||
g_prime = g / (1. - m_schedule_new)
|
||||
m_t = self.beta_1 * m + (1. - self.beta_1) * g
|
||||
m_t_prime = m_t / (1. - m_schedule_next)
|
||||
v_t = self.beta_2 * v + (1. - self.beta_2) * K.square(g)
|
||||
v_t_prime = v_t / (1. - K.pow(self.beta_2, t))
|
||||
m_t_bar = (1. - momentum_cache_t) * g_prime + momentum_cache_t_1 * m_t_prime
|
||||
|
||||
self.updates.append(K.update(m, m_t))
|
||||
self.updates.append(K.update(v, v_t))
|
||||
|
||||
p_t = p - self.lr * m_t_bar / (K.sqrt(v_t_prime) + self.epsilon)
|
||||
new_p = p_t
|
||||
|
||||
# apply constraints
|
||||
if p in constraints:
|
||||
c = constraints[p]
|
||||
new_p = c(new_p)
|
||||
self.updates.append(K.update(p, new_p))
|
||||
return self.updates
|
||||
|
||||
def get_config(self):
|
||||
config = {'lr': float(K.get_value(self.lr)),
|
||||
'beta_1': float(K.get_value(self.beta_1)),
|
||||
'beta_2': float(K.get_value(self.beta_2)),
|
||||
'epsilon': self.epsilon,
|
||||
'schedule_decay': self.schedule_decay}
|
||||
base_config = super(Nadam, self).get_config()
|
||||
return dict(list(base_config.items()) + list(config.items()))
|
||||
|
||||
|
||||
# aliases
|
||||
@@ -336,6 +525,7 @@ adagrad = Adagrad
|
||||
adadelta = Adadelta
|
||||
adam = Adam
|
||||
adamax = Adamax
|
||||
nadam = Nadam
|
||||
|
||||
|
||||
def get(identifier, kwargs=None):
|
||||
|
||||
+453
-148
@@ -1,54 +1,78 @@
|
||||
'''Fairly basic set of tools for realtime data augmentation on image data.
|
||||
'''Fairly basic set of tools for real-time data augmentation on image data.
|
||||
Can easily be extended to include new transformations,
|
||||
new preprocessing methods, etc...
|
||||
'''
|
||||
from __future__ import absolute_import
|
||||
from __future__ import print_function
|
||||
|
||||
import numpy as np
|
||||
import re
|
||||
from scipy import ndimage
|
||||
from scipy import linalg
|
||||
|
||||
from os import listdir
|
||||
from os.path import isfile, join
|
||||
import math
|
||||
import scipy.ndimage as ndi
|
||||
from six.moves import range
|
||||
import os
|
||||
import threading
|
||||
|
||||
from .. import backend as K
|
||||
|
||||
def random_rotation(x, rg, fill_mode='nearest', cval=0.):
|
||||
angle = np.random.uniform(-rg, rg)
|
||||
x = ndimage.interpolation.rotate(x, angle,
|
||||
axes=(1, 2),
|
||||
reshape=False,
|
||||
mode=fill_mode,
|
||||
cval=cval)
|
||||
|
||||
def random_rotation(x, rg, row_index=1, col_index=2, channel_index=0,
|
||||
fill_mode='nearest', cval=0.):
|
||||
theta = np.pi / 180 * np.random.uniform(-rg, rg)
|
||||
rotation_matrix = np.array([[np.cos(theta), -np.sin(theta), 0],
|
||||
[np.sin(theta), np.cos(theta), 0],
|
||||
[0, 0, 1]])
|
||||
|
||||
h, w = x.shape[row_index], x.shape[col_index]
|
||||
transform_matrix = transform_matrix_offset_center(rotation_matrix, h, w)
|
||||
x = apply_transform(x, transform_matrix, channel_index, fill_mode, cval)
|
||||
return x
|
||||
|
||||
|
||||
def random_shift(x, wrg, hrg, fill_mode='nearest', cval=0.):
|
||||
shift_x = shift_y = 0
|
||||
def random_shift(x, wrg, hrg, row_index=1, col_index=2, channel_index=0,
|
||||
fill_mode='nearest', cval=0.):
|
||||
h, w = x.shape[row_index], x.shape[col_index]
|
||||
tx = np.random.uniform(-hrg, hrg) * h
|
||||
ty = np.random.uniform(-wrg, wrg) * w
|
||||
translation_matrix = np.array([[1, 0, tx],
|
||||
[0, 1, ty],
|
||||
[0, 0, 1]])
|
||||
|
||||
if wrg:
|
||||
shift_x = np.random.uniform(-wrg, wrg) * x.shape[2]
|
||||
if hrg:
|
||||
shift_y = np.random.uniform(-hrg, hrg) * x.shape[1]
|
||||
x = ndimage.interpolation.shift(x, (0, shift_y, shift_x),
|
||||
order=0,
|
||||
mode=fill_mode,
|
||||
cval=cval)
|
||||
transform_matrix = translation_matrix # no need to do offset
|
||||
x = apply_transform(x, transform_matrix, channel_index, fill_mode, cval)
|
||||
return x
|
||||
|
||||
|
||||
def horizontal_flip(x):
|
||||
for i in range(x.shape[0]):
|
||||
x[i] = np.fliplr(x[i])
|
||||
def random_shear(x, intensity, row_index=1, col_index=2, channel_index=0,
|
||||
fill_mode='nearest', cval=0.):
|
||||
shear = np.random.uniform(-intensity, intensity)
|
||||
shear_matrix = np.array([[1, -np.sin(shear), 0],
|
||||
[0, np.cos(shear), 0],
|
||||
[0, 0, 1]])
|
||||
|
||||
h, w = x.shape[row_index], x.shape[col_index]
|
||||
transform_matrix = transform_matrix_offset_center(shear_matrix, h, w)
|
||||
x = apply_transform(x, transform_matrix, channel_index, fill_mode, cval)
|
||||
return x
|
||||
|
||||
|
||||
def vertical_flip(x):
|
||||
for i in range(x.shape[0]):
|
||||
x[i] = np.flipud(x[i])
|
||||
def random_zoom(x, zoom_range, row_index=1, col_index=2, channel_index=0,
|
||||
fill_mode='nearest', cval=0.):
|
||||
if len(zoom_range) != 2:
|
||||
raise Exception('zoom_range should be a tuple or list of two floats. '
|
||||
'Received arg: ', zoom_range)
|
||||
|
||||
if zoom_range[0] == 1 and zoom_range[1] == 1:
|
||||
zx, zy = 1, 1
|
||||
else:
|
||||
zx, zy = np.random.uniform(zoom_range[0], zoom_range[1], 2)
|
||||
zoom_matrix = np.array([[zx, 0, 0],
|
||||
[0, zy, 0],
|
||||
[0, 0, 1]])
|
||||
|
||||
h, w = x.shape[row_index], x.shape[col_index]
|
||||
transform_matrix = transform_matrix_offset_center(zoom_matrix, h, w)
|
||||
x = apply_transform(x, transform_matrix, channel_index, fill_mode, cval)
|
||||
return x
|
||||
|
||||
|
||||
@@ -57,71 +81,100 @@ def random_barrel_transform(x, intensity):
|
||||
pass
|
||||
|
||||
|
||||
def random_shear(x, intensity, fill_mode='nearest', cval=0.):
|
||||
shear = np.random.uniform(-intensity, intensity)
|
||||
shear_matrix = np.array([[1.0, -math.sin(shear), 0.0],
|
||||
[0.0, math.cos(shear), 0.0],
|
||||
[0.0, 0.0, 1.0]])
|
||||
x = ndimage.interpolation.affine_transform(x, shear_matrix,
|
||||
mode=fill_mode,
|
||||
order=3,
|
||||
cval=cval)
|
||||
def random_channel_shift(x, intensity, channel_index=0):
|
||||
x = np.rollaxis(x, channel_index, 0)
|
||||
min_x, max_x = np.min(x), np.max(x)
|
||||
channel_images = [np.clip(x_channel + np.random.uniform(-intensity, intensity), min_x, max_x)
|
||||
for x_channel in x]
|
||||
x = np.stack(channel_images, axis=0)
|
||||
x = np.rollaxis(x, 0, channel_index+1)
|
||||
return x
|
||||
|
||||
|
||||
def random_channel_shift(x, rg):
|
||||
# TODO
|
||||
pass
|
||||
def transform_matrix_offset_center(matrix, x, y):
|
||||
o_x = float(x) / 2 + 0.5
|
||||
o_y = float(y) / 2 + 0.5
|
||||
offset_matrix = np.array([[1, 0, o_x], [0, 1, o_y], [0, 0, 1]])
|
||||
reset_matrix = np.array([[1, 0, -o_x], [0, 1, -o_y], [0, 0, 1]])
|
||||
transform_matrix = np.dot(np.dot(offset_matrix, matrix), reset_matrix)
|
||||
return transform_matrix
|
||||
|
||||
|
||||
def random_zoom(x, rg, fill_mode='nearest', cval=0.):
|
||||
zoom_w = np.random.uniform(1.-rg, 1.)
|
||||
zoom_h = np.random.uniform(1.-rg, 1.)
|
||||
x = ndimage.interpolation.zoom(x, zoom=(1., zoom_w, zoom_h),
|
||||
mode=fill_mode,
|
||||
cval=cval)
|
||||
return x # shape of result will be different from shape of input!
|
||||
def apply_transform(x, transform_matrix, channel_index=0, fill_mode='nearest', cval=0.):
|
||||
x = np.rollaxis(x, channel_index, 0)
|
||||
final_affine_matrix = transform_matrix[:2, :2]
|
||||
final_offset = transform_matrix[:2, 2]
|
||||
channel_images = [ndi.interpolation.affine_transform(x_channel, final_affine_matrix,
|
||||
final_offset, order=0, mode=fill_mode, cval=cval) for x_channel in x]
|
||||
x = np.stack(channel_images, axis=0)
|
||||
x = np.rollaxis(x, 0, channel_index+1)
|
||||
return x
|
||||
|
||||
|
||||
def array_to_img(x, scale=True):
|
||||
def flip_axis(x, axis):
|
||||
x = np.asarray(x).swapaxes(axis, 0)
|
||||
x = x[::-1, ...]
|
||||
x = x.swapaxes(0, axis)
|
||||
return x
|
||||
|
||||
|
||||
def array_to_img(x, dim_ordering='default', scale=True):
|
||||
from PIL import Image
|
||||
x = x.transpose(1, 2, 0)
|
||||
if dim_ordering == 'default':
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
if dim_ordering == 'th':
|
||||
x = x.transpose(1, 2, 0)
|
||||
if scale:
|
||||
x += max(-np.min(x), 0)
|
||||
x /= np.max(x)
|
||||
x_max = np.max(x)
|
||||
if x_max != 0:
|
||||
x /= x_max
|
||||
x *= 255
|
||||
if x.shape[2] == 3:
|
||||
# RGB
|
||||
return Image.fromarray(x.astype('uint8'), 'RGB')
|
||||
else:
|
||||
elif x.shape[2] == 1:
|
||||
# grayscale
|
||||
return Image.fromarray(x[:, :, 0].astype('uint8'), 'L')
|
||||
else:
|
||||
raise Exception('Unsupported channel number: ', x.shape[2])
|
||||
|
||||
|
||||
def img_to_array(img):
|
||||
def img_to_array(img, dim_ordering='default'):
|
||||
if dim_ordering == 'default':
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
if dim_ordering not in ['th', 'tf']:
|
||||
raise Exception('Unknown dim_ordering: ', dim_ordering)
|
||||
# image has dim_ordering (height, width, channel)
|
||||
x = np.asarray(img, dtype='float32')
|
||||
if len(x.shape) == 3:
|
||||
# RGB: height, width, channel -> channel, height, width
|
||||
x = x.transpose(2, 0, 1)
|
||||
if dim_ordering == 'th':
|
||||
x = x.transpose(2, 0, 1)
|
||||
elif len(x.shape) == 2:
|
||||
if dim_ordering == 'th':
|
||||
x = x.reshape((1, x.shape[0], x.shape[1]))
|
||||
else:
|
||||
x = x.reshape((x.shape[0], x.shape[1], 1))
|
||||
else:
|
||||
# grayscale: height, width -> channel, height, width
|
||||
x = x.reshape((1, x.shape[0], x.shape[1]))
|
||||
raise Exception('Unsupported image shape: ', x.shape)
|
||||
return x
|
||||
|
||||
|
||||
def load_img(path, grayscale=False):
|
||||
def load_img(path, grayscale=False, target_size=None):
|
||||
from PIL import Image
|
||||
img = Image.open(path)
|
||||
if grayscale:
|
||||
img = img.convert('L')
|
||||
else: # Ensure 3 channel even when loaded image is grayscale
|
||||
img = img.convert('RGB')
|
||||
if target_size:
|
||||
img = img.resize((target_size[1], target_size[0]))
|
||||
return img
|
||||
|
||||
|
||||
def list_pictures(directory, ext='jpg|jpeg|bmp|png'):
|
||||
return [join(directory, f) for f in listdir(directory)
|
||||
if isfile(join(directory, f)) and re.match('([\w]+\.(?:' + ext + '))', f)]
|
||||
return [os.path.join(directory, f) for f in os.listdir(directory)
|
||||
if os.path.isfile(os.path.join(directory, f)) and re.match('([\w]+\.(?:' + ext + '))', f)]
|
||||
|
||||
|
||||
class ImageDataGenerator(object):
|
||||
@@ -138,101 +191,105 @@ class ImageDataGenerator(object):
|
||||
width_shift_range: fraction of total width.
|
||||
height_shift_range: fraction of total height.
|
||||
shear_range: shear intensity (shear angle in radians).
|
||||
zoom_range: amount of zoom. if scalar z, zoom will be randomly picked
|
||||
in the range [1-z, 1+z]. A sequence of two can be passed instead
|
||||
to select this range.
|
||||
channel_shift_range: shift range for each channels.
|
||||
fill_mode: points outside the boundaries are filled according to the
|
||||
given mode ('constant', 'nearest', 'reflect' or 'wrap'). Default
|
||||
is 'nearest'.
|
||||
cval: value used for points outside the boundaries when fill_mode is
|
||||
'constant'. Default is 0.
|
||||
horizontal_flip: whether to randomly flip images horizontally.
|
||||
vertical_flip: whether to randomly flip images vertically.
|
||||
rescale: rescaling factor. If None or 0, no rescaling is applied,
|
||||
otherwise we multiply the data by the value provided (before applying
|
||||
any other transformation).
|
||||
dim_ordering: 'th' or 'tf'. In 'th' mode, the channels dimension
|
||||
(the depth) is at index 1, in 'tf' mode it is at index 3.
|
||||
It defaults to the `image_dim_ordering` value found in your
|
||||
Keras config file at `~/.keras/keras.json`.
|
||||
If you never set it, then it will be "th".
|
||||
'''
|
||||
def __init__(self,
|
||||
featurewise_center=True,
|
||||
featurewise_center=False,
|
||||
samplewise_center=False,
|
||||
featurewise_std_normalization=True,
|
||||
featurewise_std_normalization=False,
|
||||
samplewise_std_normalization=False,
|
||||
zca_whitening=False,
|
||||
rotation_range=0.,
|
||||
width_shift_range=0.,
|
||||
height_shift_range=0.,
|
||||
shear_range=0.,
|
||||
zoom_range=0.,
|
||||
channel_shift_range=0.,
|
||||
fill_mode='nearest',
|
||||
cval=0.,
|
||||
horizontal_flip=False,
|
||||
vertical_flip=False):
|
||||
vertical_flip=False,
|
||||
rescale=None,
|
||||
dim_ordering='default'):
|
||||
if dim_ordering == 'default':
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
self.__dict__.update(locals())
|
||||
self.mean = None
|
||||
self.std = None
|
||||
self.principal_components = None
|
||||
self.lock = threading.Lock()
|
||||
self.rescale = rescale
|
||||
|
||||
def _flow_index(self, N, batch_size=32, shuffle=False, seed=None):
|
||||
b = 0
|
||||
total_b = 0
|
||||
while 1:
|
||||
if b == 0:
|
||||
if seed is not None:
|
||||
np.random.seed(seed + total_b)
|
||||
if dim_ordering not in {'tf', 'th'}:
|
||||
raise Exception('dim_ordering should be "tf" (channel after row and '
|
||||
'column) or "th" (channel before row and column). '
|
||||
'Received arg: ', dim_ordering)
|
||||
self.dim_ordering = dim_ordering
|
||||
if dim_ordering == 'th':
|
||||
self.channel_index = 1
|
||||
self.row_index = 2
|
||||
self.col_index = 3
|
||||
if dim_ordering == 'tf':
|
||||
self.channel_index = 3
|
||||
self.row_index = 1
|
||||
self.col_index = 2
|
||||
|
||||
if shuffle:
|
||||
index_array = np.random.permutation(N)
|
||||
else:
|
||||
index_array = np.arange(N)
|
||||
if np.isscalar(zoom_range):
|
||||
self.zoom_range = [1 - zoom_range, 1 + zoom_range]
|
||||
elif len(zoom_range) == 2:
|
||||
self.zoom_range = [zoom_range[0], zoom_range[1]]
|
||||
else:
|
||||
raise Exception('zoom_range should be a float or '
|
||||
'a tuple or list of two floats. '
|
||||
'Received arg: ', zoom_range)
|
||||
|
||||
current_index = (b * batch_size) % N
|
||||
if N >= current_index + batch_size:
|
||||
current_batch_size = batch_size
|
||||
else:
|
||||
current_batch_size = N - current_index
|
||||
|
||||
if current_batch_size == batch_size:
|
||||
b += 1
|
||||
else:
|
||||
b = 0
|
||||
total_b += 1
|
||||
yield (index_array[current_index: current_index + current_batch_size],
|
||||
current_index, current_batch_size)
|
||||
|
||||
def flow(self, X, y, batch_size=32, shuffle=False, seed=None,
|
||||
def flow(self, X, y=None, batch_size=32, shuffle=True, seed=None,
|
||||
save_to_dir=None, save_prefix='', save_format='jpeg'):
|
||||
assert len(X) == len(y)
|
||||
self.X = X
|
||||
self.y = y
|
||||
self.save_to_dir = save_to_dir
|
||||
self.save_prefix = save_prefix
|
||||
self.save_format = save_format
|
||||
self.flow_generator = self._flow_index(X.shape[0], batch_size,
|
||||
shuffle, seed)
|
||||
return self
|
||||
return NumpyArrayIterator(
|
||||
X, y, self,
|
||||
batch_size=batch_size, shuffle=shuffle, seed=seed,
|
||||
dim_ordering=self.dim_ordering,
|
||||
save_to_dir=save_to_dir, save_prefix=save_prefix, save_format=save_format)
|
||||
|
||||
def __iter__(self):
|
||||
# needed if we want to do something like:
|
||||
# for x, y in data_gen.flow(...):
|
||||
return self
|
||||
|
||||
def next(self):
|
||||
# for python 2.x.
|
||||
# Keeps under lock only the mechanism which advances
|
||||
# the indexing of each batch
|
||||
# see # http://anandology.com/blog/using-iterators-and-generators/
|
||||
with self.lock:
|
||||
index_array, current_index, current_batch_size = next(self.flow_generator)
|
||||
# The transformation of images is not under thread lock so it can be done in parallel
|
||||
bX = np.zeros(tuple([current_batch_size] + list(self.X.shape)[1:]))
|
||||
for i, j in enumerate(index_array):
|
||||
x = self.X[j]
|
||||
x = self.random_transform(x.astype('float32'))
|
||||
x = self.standardize(x)
|
||||
bX[i] = x
|
||||
if self.save_to_dir:
|
||||
for i in range(current_batch_size):
|
||||
img = array_to_img(bX[i], scale=True)
|
||||
img.save(self.save_to_dir + '/' + self.save_prefix + '_' + str(current_index + i) + '.' + self.save_format)
|
||||
bY = self.y[index_array]
|
||||
return bX, bY
|
||||
|
||||
def __next__(self):
|
||||
# for python 3.x.
|
||||
return self.next()
|
||||
def flow_from_directory(self, directory,
|
||||
target_size=(256, 256), color_mode='rgb',
|
||||
classes=None, class_mode='categorical',
|
||||
batch_size=32, shuffle=True, seed=None,
|
||||
save_to_dir=None, save_prefix='', save_format='jpeg'):
|
||||
return DirectoryIterator(
|
||||
directory, self,
|
||||
target_size=target_size, color_mode=color_mode,
|
||||
classes=classes, class_mode=class_mode,
|
||||
dim_ordering=self.dim_ordering,
|
||||
batch_size=batch_size, shuffle=shuffle, seed=seed,
|
||||
save_to_dir=save_to_dir, save_prefix=save_prefix, save_format=save_format)
|
||||
|
||||
def standardize(self, x):
|
||||
if self.rescale:
|
||||
x *= self.rescale
|
||||
# x is a single image, so it doesn't have image number at index 0
|
||||
img_channel_index = self.channel_index - 1
|
||||
if self.samplewise_center:
|
||||
x -= np.mean(x, axis=1, keepdims=True)
|
||||
x -= np.mean(x, axis=img_channel_index, keepdims=True)
|
||||
if self.samplewise_std_normalization:
|
||||
x /= (np.std(x, axis=1, keepdims=True) + 1e-7)
|
||||
x /= (np.std(x, axis=img_channel_index, keepdims=True) + 1e-7)
|
||||
|
||||
if self.featurewise_center:
|
||||
x -= self.mean
|
||||
@@ -240,29 +297,75 @@ class ImageDataGenerator(object):
|
||||
x /= (self.std + 1e-7)
|
||||
|
||||
if self.zca_whitening:
|
||||
flatx = np.reshape(x, (x.shape[0] * x.shape[1] * x.shape[2]))
|
||||
flatx = np.reshape(x, (x.size))
|
||||
whitex = np.dot(flatx, self.principal_components)
|
||||
x = np.reshape(whitex, (x.shape[0], x.shape[1], x.shape[2]))
|
||||
|
||||
return x
|
||||
|
||||
def random_transform(self, x):
|
||||
# x is a single image, so it doesn't have image number at index 0
|
||||
img_row_index = self.row_index - 1
|
||||
img_col_index = self.col_index - 1
|
||||
img_channel_index = self.channel_index - 1
|
||||
|
||||
# use composition of homographies to generate final transform that needs to be applied
|
||||
if self.rotation_range:
|
||||
x = random_rotation(x, self.rotation_range)
|
||||
if self.width_shift_range or self.height_shift_range:
|
||||
x = random_shift(x, self.width_shift_range, self.height_shift_range)
|
||||
theta = np.pi / 180 * np.random.uniform(-self.rotation_range, self.rotation_range)
|
||||
else:
|
||||
theta = 0
|
||||
rotation_matrix = np.array([[np.cos(theta), -np.sin(theta), 0],
|
||||
[np.sin(theta), np.cos(theta), 0],
|
||||
[0, 0, 1]])
|
||||
if self.height_shift_range:
|
||||
tx = np.random.uniform(-self.height_shift_range, self.height_shift_range) * x.shape[img_row_index]
|
||||
else:
|
||||
tx = 0
|
||||
|
||||
if self.width_shift_range:
|
||||
ty = np.random.uniform(-self.width_shift_range, self.width_shift_range) * x.shape[img_col_index]
|
||||
else:
|
||||
ty = 0
|
||||
|
||||
translation_matrix = np.array([[1, 0, tx],
|
||||
[0, 1, ty],
|
||||
[0, 0, 1]])
|
||||
if self.shear_range:
|
||||
shear = np.random.uniform(-self.shear_range, self.shear_range)
|
||||
else:
|
||||
shear = 0
|
||||
shear_matrix = np.array([[1, -np.sin(shear), 0],
|
||||
[0, np.cos(shear), 0],
|
||||
[0, 0, 1]])
|
||||
|
||||
if self.zoom_range[0] == 1 and self.zoom_range[1] == 1:
|
||||
zx, zy = 1, 1
|
||||
else:
|
||||
zx, zy = np.random.uniform(self.zoom_range[0], self.zoom_range[1], 2)
|
||||
zoom_matrix = np.array([[zx, 0, 0],
|
||||
[0, zy, 0],
|
||||
[0, 0, 1]])
|
||||
|
||||
transform_matrix = np.dot(np.dot(np.dot(rotation_matrix, translation_matrix), shear_matrix), zoom_matrix)
|
||||
|
||||
h, w = x.shape[img_row_index], x.shape[img_col_index]
|
||||
transform_matrix = transform_matrix_offset_center(transform_matrix, h, w)
|
||||
x = apply_transform(x, transform_matrix, img_channel_index,
|
||||
fill_mode=self.fill_mode, cval=self.cval)
|
||||
if self.channel_shift_range != 0:
|
||||
x = random_channel_shift(x, self.channel_shift_range, img_channel_index)
|
||||
|
||||
if self.horizontal_flip:
|
||||
if np.random.random() < 0.5:
|
||||
x = horizontal_flip(x)
|
||||
x = flip_axis(x, img_col_index)
|
||||
|
||||
if self.vertical_flip:
|
||||
if np.random.random() < 0.5:
|
||||
x = vertical_flip(x)
|
||||
if self.shear_range:
|
||||
x = random_shear(x, self.shear_range)
|
||||
x = flip_axis(x, img_row_index)
|
||||
|
||||
# TODO:
|
||||
# zoom
|
||||
# channel-wise normalization
|
||||
# barrel/fisheye
|
||||
# channel shifting
|
||||
return x
|
||||
|
||||
def fit(self, X,
|
||||
@@ -284,14 +387,13 @@ class ImageDataGenerator(object):
|
||||
aX = np.zeros(tuple([rounds * X.shape[0]] + list(X.shape)[1:]))
|
||||
for r in range(rounds):
|
||||
for i in range(X.shape[0]):
|
||||
img = array_to_img(X[i])
|
||||
img = self.random_transform(img)
|
||||
aX[i + r * X.shape[0]] = img_to_array(img)
|
||||
aX[i + r * X.shape[0]] = self.random_transform(X[i])
|
||||
X = aX
|
||||
|
||||
if self.featurewise_center:
|
||||
self.mean = np.mean(X, axis=0)
|
||||
X -= self.mean
|
||||
|
||||
if self.featurewise_std_normalization:
|
||||
self.std = np.std(X, axis=0)
|
||||
X /= (self.std + 1e-7)
|
||||
@@ -303,10 +405,213 @@ class ImageDataGenerator(object):
|
||||
self.principal_components = np.dot(np.dot(U, np.diag(1. / np.sqrt(S + 10e-7))), U.T)
|
||||
|
||||
|
||||
class GraphImageDataGenerator(ImageDataGenerator):
|
||||
'''Example of how to build a generator for a Graph model
|
||||
'''
|
||||
class Iterator(object):
|
||||
|
||||
def __init__(self, N, batch_size, shuffle, seed):
|
||||
self.N = N
|
||||
self.batch_size = batch_size
|
||||
self.shuffle = shuffle
|
||||
self.batch_index = 0
|
||||
self.total_batches_seen = 0
|
||||
self.lock = threading.Lock()
|
||||
self.index_generator = self._flow_index(N, batch_size, shuffle, seed)
|
||||
|
||||
def reset(self):
|
||||
self.batch_index = 0
|
||||
|
||||
def _flow_index(self, N, batch_size=32, shuffle=False, seed=None):
|
||||
# ensure self.batch_index is 0
|
||||
self.reset()
|
||||
while 1:
|
||||
if self.batch_index == 0:
|
||||
index_array = np.arange(N)
|
||||
if shuffle:
|
||||
if seed is not None:
|
||||
np.random.seed(seed + self.total_batches_seen)
|
||||
index_array = np.random.permutation(N)
|
||||
|
||||
current_index = (self.batch_index * batch_size) % N
|
||||
if N >= current_index + batch_size:
|
||||
current_batch_size = batch_size
|
||||
self.batch_index += 1
|
||||
else:
|
||||
current_batch_size = N - current_index
|
||||
self.batch_index = 0
|
||||
self.total_batches_seen += 1
|
||||
yield (index_array[current_index: current_index + current_batch_size],
|
||||
current_index, current_batch_size)
|
||||
|
||||
def __iter__(self):
|
||||
# needed if we want to do something like:
|
||||
# for x, y in data_gen.flow(...):
|
||||
return self
|
||||
|
||||
def __next__(self, *args, **kwargs):
|
||||
return self.next(*args, **kwargs)
|
||||
|
||||
|
||||
class NumpyArrayIterator(Iterator):
|
||||
|
||||
def __init__(self, X, y, image_data_generator,
|
||||
batch_size=32, shuffle=False, seed=None,
|
||||
dim_ordering='default',
|
||||
save_to_dir=None, save_prefix='', save_format='jpeg'):
|
||||
if y is not None and len(X) != len(y):
|
||||
raise Exception('X (images tensor) and y (labels) '
|
||||
'should have the same length. '
|
||||
'Found: X.shape = %s, y.shape = %s' % (np.asarray(X).shape, np.asarray(y).shape))
|
||||
if dim_ordering == 'default':
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
self.X = X
|
||||
self.y = y
|
||||
self.image_data_generator = image_data_generator
|
||||
self.dim_ordering = dim_ordering
|
||||
self.save_to_dir = save_to_dir
|
||||
self.save_prefix = save_prefix
|
||||
self.save_format = save_format
|
||||
super(NumpyArrayIterator, self).__init__(X.shape[0], batch_size, shuffle, seed)
|
||||
|
||||
def next(self):
|
||||
bX, bY = super(GraphImageDataGenerator, self).next()
|
||||
return {'input': bX, 'output': bY}
|
||||
# for python 2.x.
|
||||
# Keeps under lock only the mechanism which advances
|
||||
# the indexing of each batch
|
||||
# see http://anandology.com/blog/using-iterators-and-generators/
|
||||
with self.lock:
|
||||
index_array, current_index, current_batch_size = next(self.index_generator)
|
||||
# The transformation of images is not under thread lock so it can be done in parallel
|
||||
batch_x = np.zeros(tuple([current_batch_size] + list(self.X.shape)[1:]))
|
||||
for i, j in enumerate(index_array):
|
||||
x = self.X[j]
|
||||
x = self.image_data_generator.random_transform(x.astype('float32'))
|
||||
x = self.image_data_generator.standardize(x)
|
||||
batch_x[i] = x
|
||||
if self.save_to_dir:
|
||||
for i in range(current_batch_size):
|
||||
img = array_to_img(batch_x[i], self.dim_ordering, scale=True)
|
||||
fname = '{prefix}_{index}_{hash}.{format}'.format(prefix=self.save_prefix,
|
||||
index=current_index + i,
|
||||
hash=np.random.randint(1e4),
|
||||
format=self.save_format)
|
||||
img.save(os.path.join(self.save_to_dir, fname))
|
||||
if self.y is None:
|
||||
return batch_x
|
||||
batch_y = self.y[index_array]
|
||||
return batch_x, batch_y
|
||||
|
||||
|
||||
class DirectoryIterator(Iterator):
|
||||
|
||||
def __init__(self, directory, image_data_generator,
|
||||
target_size=(256, 256), color_mode='rgb',
|
||||
dim_ordering='default',
|
||||
classes=None, class_mode='categorical',
|
||||
batch_size=32, shuffle=True, seed=None,
|
||||
save_to_dir=None, save_prefix='', save_format='jpeg'):
|
||||
if dim_ordering == 'default':
|
||||
dim_ordering = K.image_dim_ordering()
|
||||
self.directory = directory
|
||||
self.image_data_generator = image_data_generator
|
||||
self.target_size = tuple(target_size)
|
||||
if color_mode not in {'rgb', 'grayscale'}:
|
||||
raise ValueError('Invalid color mode:', color_mode,
|
||||
'; expected "rgb" or "grayscale".')
|
||||
self.color_mode = color_mode
|
||||
self.dim_ordering = dim_ordering
|
||||
if self.color_mode == 'rgb':
|
||||
if self.dim_ordering == 'tf':
|
||||
self.image_shape = self.target_size + (3,)
|
||||
else:
|
||||
self.image_shape = (3,) + self.target_size
|
||||
else:
|
||||
if self.dim_ordering == 'tf':
|
||||
self.image_shape = self.target_size + (1,)
|
||||
else:
|
||||
self.image_shape = (1,) + self.target_size
|
||||
self.classes = classes
|
||||
if class_mode not in {'categorical', 'binary', 'sparse', None}:
|
||||
raise ValueError('Invalid class_mode:', class_mode,
|
||||
'; expected one of "categorical", '
|
||||
'"binary", "sparse", or None.')
|
||||
self.class_mode = class_mode
|
||||
self.save_to_dir = save_to_dir
|
||||
self.save_prefix = save_prefix
|
||||
self.save_format = save_format
|
||||
|
||||
white_list_formats = {'png', 'jpg', 'jpeg', 'bmp'}
|
||||
|
||||
# first, count the number of samples and classes
|
||||
self.nb_sample = 0
|
||||
|
||||
if not classes:
|
||||
classes = []
|
||||
for subdir in sorted(os.listdir(directory)):
|
||||
if os.path.isdir(os.path.join(directory, subdir)):
|
||||
classes.append(subdir)
|
||||
self.nb_class = len(classes)
|
||||
self.class_indices = dict(zip(classes, range(len(classes))))
|
||||
|
||||
for subdir in classes:
|
||||
subpath = os.path.join(directory, subdir)
|
||||
for fname in os.listdir(subpath):
|
||||
is_valid = False
|
||||
for extension in white_list_formats:
|
||||
if fname.lower().endswith('.' + extension):
|
||||
is_valid = True
|
||||
break
|
||||
if is_valid:
|
||||
self.nb_sample += 1
|
||||
print('Found %d images belonging to %d classes.' % (self.nb_sample, self.nb_class))
|
||||
|
||||
# second, build an index of the images in the different class subfolders
|
||||
self.filenames = []
|
||||
self.classes = np.zeros((self.nb_sample,), dtype='int32')
|
||||
i = 0
|
||||
for subdir in classes:
|
||||
subpath = os.path.join(directory, subdir)
|
||||
for fname in os.listdir(subpath):
|
||||
is_valid = False
|
||||
for extension in white_list_formats:
|
||||
if fname.lower().endswith('.' + extension):
|
||||
is_valid = True
|
||||
break
|
||||
if is_valid:
|
||||
self.classes[i] = self.class_indices[subdir]
|
||||
self.filenames.append(os.path.join(subdir, fname))
|
||||
i += 1
|
||||
super(DirectoryIterator, self).__init__(self.nb_sample, batch_size, shuffle, seed)
|
||||
|
||||
def next(self):
|
||||
with self.lock:
|
||||
index_array, current_index, current_batch_size = next(self.index_generator)
|
||||
# The transformation of images is not under thread lock so it can be done in parallel
|
||||
batch_x = np.zeros((current_batch_size,) + self.image_shape)
|
||||
grayscale = self.color_mode == 'grayscale'
|
||||
# build batch of image data
|
||||
for i, j in enumerate(index_array):
|
||||
fname = self.filenames[j]
|
||||
img = load_img(os.path.join(self.directory, fname), grayscale=grayscale, target_size=self.target_size)
|
||||
x = img_to_array(img, dim_ordering=self.dim_ordering)
|
||||
x = self.image_data_generator.random_transform(x)
|
||||
x = self.image_data_generator.standardize(x)
|
||||
batch_x[i] = x
|
||||
# optionally save augmented images to disk for debugging purposes
|
||||
if self.save_to_dir:
|
||||
for i in range(current_batch_size):
|
||||
img = array_to_img(batch_x[i], self.dim_ordering, scale=True)
|
||||
fname = '{prefix}_{index}_{hash}.{format}'.format(prefix=self.save_prefix,
|
||||
index=current_index + i,
|
||||
hash=np.random.randint(1e4),
|
||||
format=self.save_format)
|
||||
img.save(os.path.join(self.save_to_dir, fname))
|
||||
# build batch of labels
|
||||
if self.class_mode == 'sparse':
|
||||
batch_y = self.classes[index_array]
|
||||
elif self.class_mode == 'binary':
|
||||
batch_y = self.classes[index_array].astype('float32')
|
||||
elif self.class_mode == 'categorical':
|
||||
batch_y = np.zeros((len(batch_x), self.nb_class), dtype='float32')
|
||||
for i, label in enumerate(self.classes[index_array]):
|
||||
batch_y[i, label] = 1.
|
||||
else:
|
||||
return batch_x
|
||||
return batch_x, batch_y
|
||||
|
||||
@@ -100,7 +100,7 @@ def skipgrams(sequence, vocabulary_size,
|
||||
'''Take a sequence (list of indexes of words),
|
||||
returns couples of [word_index, other_word index] and labels (1s or 0s),
|
||||
where label = 1 if 'other_word' belongs to the context of 'word',
|
||||
and label=0 if 'other_word' is ramdomly sampled
|
||||
and label=0 if 'other_word' is randomly sampled
|
||||
|
||||
# Arguments
|
||||
vocabulary_size: int. maximum possible word index + 1
|
||||
@@ -113,7 +113,7 @@ def skipgrams(sequence, vocabulary_size,
|
||||
if True labels will be categorical eg. [[1,0],[0,1],[0,1] .. ]
|
||||
|
||||
# Returns
|
||||
couples, lables: where `couples` are int pairs and
|
||||
couples, labels: where `couples` are int pairs and
|
||||
`labels` are either 0 or 1.
|
||||
|
||||
# Notes
|
||||
|
||||
@@ -3,6 +3,7 @@
|
||||
from a fast Cython rewrite.
|
||||
'''
|
||||
from __future__ import absolute_import
|
||||
from __future__ import division
|
||||
|
||||
import string
|
||||
import sys
|
||||
@@ -98,6 +99,7 @@ class Tokenizer(object):
|
||||
wcounts = list(self.word_counts.items())
|
||||
wcounts.sort(key=lambda x: x[1], reverse=True)
|
||||
sorted_voc = [wc[0] for wc in wcounts]
|
||||
# note that index 0 is reserved, never assigned to an existing word
|
||||
self.word_index = dict(list(zip(sorted_voc, list(range(1, len(sorted_voc) + 1)))))
|
||||
|
||||
self.index_docs = {}
|
||||
@@ -206,9 +208,11 @@ class Tokenizer(object):
|
||||
elif mode == 'binary':
|
||||
X[i][j] = 1
|
||||
elif mode == 'tfidf':
|
||||
tf = np.log(c / len(seq))
|
||||
df = (1 + np.log(1 + self.index_docs.get(j, 0) / (1 + self.document_count)))
|
||||
X[i][j] = tf / df
|
||||
# Use weighting scheme 2 in
|
||||
# https://en.wikipedia.org/wiki/Tf%E2%80%93idf
|
||||
tf = 1 + np.log(c)
|
||||
idf = np.log(1 + self.document_count / (1 + self.index_docs.get(j, 0)))
|
||||
X[i][j] = tf * idf
|
||||
else:
|
||||
raise Exception('Unknown vectorization mode: ' + str(mode))
|
||||
return X
|
||||
|
||||
+82
-21
@@ -13,46 +13,108 @@ class Regularizer(object):
|
||||
return loss
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__}
|
||||
return {'name': self.__class__.__name__}
|
||||
|
||||
|
||||
class WeightRegularizer(Regularizer):
|
||||
def __init__(self, l1=0., l2=0.):
|
||||
self.l1 = l1
|
||||
self.l2 = l2
|
||||
class EigenvalueRegularizer(Regularizer):
|
||||
'''This takes a constant that controls
|
||||
the regularization by Eigenvalue Decay on the
|
||||
current layer and outputs the regularized
|
||||
loss (evaluated on the training data) and
|
||||
the original loss (evaluated on the
|
||||
validation data).
|
||||
'''
|
||||
def __init__(self, k):
|
||||
self.k = k
|
||||
self.uses_learning_phase = True
|
||||
|
||||
def set_param(self, p):
|
||||
self.p = p
|
||||
|
||||
def __call__(self, loss):
|
||||
loss += K.sum(K.abs(self.p)) * self.l1
|
||||
loss += K.sum(K.square(self.p)) * self.l2
|
||||
return loss
|
||||
power = 9 # number of iterations of the power method
|
||||
W = self.p
|
||||
if K.ndim(W) > 2:
|
||||
raise Exception('Eigenvalue Decay regularizer '
|
||||
'is only available for dense '
|
||||
'and embedding layers.')
|
||||
WW = K.dot(K.transpose(W), W)
|
||||
dim1, dim2 = K.eval(K.shape(WW)) # number of neurons in the layer
|
||||
|
||||
# power method for approximating the dominant eigenvector:
|
||||
o = K.ones([dim1, 1]) # initial values for the dominant eigenvector
|
||||
main_eigenvect = K.dot(WW, o)
|
||||
for n in range(power - 1):
|
||||
main_eigenvect = K.dot(WW, main_eigenvect)
|
||||
|
||||
WWd = K.dot(WW, main_eigenvect)
|
||||
|
||||
# the corresponding dominant eigenvalue:
|
||||
main_eigenval = K.dot(K.transpose(WWd), main_eigenvect) / K.dot(K.transpose(main_eigenvect), main_eigenvect)
|
||||
regularized_loss = loss + (main_eigenval ** 0.5) * self.k # multiplied by the given regularization gain
|
||||
|
||||
return K.in_train_phase(regularized_loss[0, 0], loss)
|
||||
|
||||
|
||||
class WeightRegularizer(Regularizer):
|
||||
def __init__(self, l1=0., l2=0.):
|
||||
self.l1 = K.cast_to_floatx(l1)
|
||||
self.l2 = K.cast_to_floatx(l2)
|
||||
self.uses_learning_phase = True
|
||||
|
||||
def set_param(self, p):
|
||||
self.p = p
|
||||
|
||||
def __call__(self, loss):
|
||||
if not hasattr(self, 'p'):
|
||||
raise Exception('Need to call `set_param` on '
|
||||
'WeightRegularizer instance '
|
||||
'before calling the instance. '
|
||||
'Check that you are not passing '
|
||||
'a WeightRegularizer instead of an '
|
||||
'ActivityRegularizer '
|
||||
'(i.e. activity_regularizer="l2" instead '
|
||||
'of activity_regularizer="activity_l2".')
|
||||
regularized_loss = loss
|
||||
if self.l1:
|
||||
regularized_loss += K.sum(self.l1 * K.abs(self.p))
|
||||
if self.l2:
|
||||
regularized_loss += K.sum(self.l2 * K.square(self.p))
|
||||
return K.in_train_phase(regularized_loss, loss)
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"l1": self.l1,
|
||||
"l2": self.l2}
|
||||
return {'name': self.__class__.__name__,
|
||||
'l1': float(self.l1),
|
||||
'l2': float(self.l2)}
|
||||
|
||||
|
||||
class ActivityRegularizer(Regularizer):
|
||||
def __init__(self, l1=0., l2=0.):
|
||||
self.l1 = l1
|
||||
self.l2 = l2
|
||||
self.l1 = K.cast_to_floatx(l1)
|
||||
self.l2 = K.cast_to_floatx(l2)
|
||||
self.uses_learning_phase = True
|
||||
|
||||
def set_layer(self, layer):
|
||||
self.layer = layer
|
||||
|
||||
def __call__(self, loss):
|
||||
output = self.layer.get_output(True)
|
||||
loss += self.l1 * K.sum(K.mean(K.abs(output), axis=0))
|
||||
loss += self.l2 * K.sum(K.mean(K.square(output), axis=0))
|
||||
return loss
|
||||
if not hasattr(self, 'layer'):
|
||||
raise Exception('Need to call `set_layer` on '
|
||||
'ActivityRegularizer instance '
|
||||
'before calling the instance.')
|
||||
regularized_loss = loss
|
||||
for i in range(len(self.layer.inbound_nodes)):
|
||||
output = self.layer.get_output_at(i)
|
||||
if self.l1:
|
||||
regularized_loss += K.sum(self.l1 * K.abs(output))
|
||||
if self.l2:
|
||||
regularized_loss += K.sum(self.l2 * K.square(output))
|
||||
return K.in_train_phase(regularized_loss, loss)
|
||||
|
||||
def get_config(self):
|
||||
return {"name": self.__class__.__name__,
|
||||
"l1": self.l1,
|
||||
"l2": self.l2}
|
||||
return {'name': self.__class__.__name__,
|
||||
'l1': float(self.l1),
|
||||
'l2': float(self.l2)}
|
||||
|
||||
|
||||
def l1(l=0.01):
|
||||
@@ -78,7 +140,6 @@ def activity_l2(l=0.01):
|
||||
def activity_l1l2(l1=0.01, l2=0.01):
|
||||
return ActivityRegularizer(l1=l1, l2=l2)
|
||||
|
||||
identity = Regularizer
|
||||
|
||||
from .utils.generic_utils import get_from_module
|
||||
def get(identifier, kwargs=None):
|
||||
|
||||
@@ -5,6 +5,7 @@ import tarfile
|
||||
import os
|
||||
import sys
|
||||
import shutil
|
||||
import hashlib
|
||||
from six.moves.urllib.request import urlopen
|
||||
from six.moves.urllib.error import URLError, HTTPError
|
||||
|
||||
@@ -36,11 +37,12 @@ else:
|
||||
from six.moves.urllib.request import urlretrieve
|
||||
|
||||
|
||||
def get_file(fname, origin, untar=False):
|
||||
def get_file(fname, origin, untar=False,
|
||||
md5_hash=None, cache_subdir='datasets'):
|
||||
datadir_base = os.path.expanduser(os.path.join('~', '.keras'))
|
||||
if not os.access(datadir_base, os.W_OK):
|
||||
datadir_base = os.path.join('/tmp', '.keras')
|
||||
datadir = os.path.join(datadir_base, 'datasets')
|
||||
datadir = os.path.join(datadir_base, cache_subdir)
|
||||
if not os.path.exists(datadir):
|
||||
os.makedirs(datadir)
|
||||
|
||||
@@ -50,7 +52,18 @@ def get_file(fname, origin, untar=False):
|
||||
else:
|
||||
fpath = os.path.join(datadir, fname)
|
||||
|
||||
if not os.path.exists(fpath):
|
||||
download = False
|
||||
if os.path.exists(fpath):
|
||||
# file found; verify integrity if a hash was provided
|
||||
if md5_hash is not None:
|
||||
if not validate_file(fpath, md5_hash):
|
||||
print('A local file was found, but it seems to be '
|
||||
'incomplete or outdated.')
|
||||
download = True
|
||||
else:
|
||||
download = True
|
||||
|
||||
if download:
|
||||
print('Downloading data from', origin)
|
||||
global progbar
|
||||
progbar = None
|
||||
@@ -73,7 +86,7 @@ def get_file(fname, origin, untar=False):
|
||||
except (Exception, KeyboardInterrupt) as e:
|
||||
if os.path.exists(fpath):
|
||||
os.remove(fpath)
|
||||
raise e
|
||||
raise
|
||||
progbar = None
|
||||
|
||||
if untar:
|
||||
@@ -88,8 +101,19 @@ def get_file(fname, origin, untar=False):
|
||||
os.remove(untar_fpath)
|
||||
else:
|
||||
shutil.rmtree(untar_fpath)
|
||||
raise e
|
||||
raise
|
||||
tfile.close()
|
||||
return untar_fpath
|
||||
|
||||
return fpath
|
||||
|
||||
|
||||
def validate_file(fpath, md5_hash):
|
||||
hasher = hashlib.md5()
|
||||
with open(fpath, 'rb') as f:
|
||||
buf = f.read()
|
||||
hasher.update(buf)
|
||||
if str(hasher.hexdigest()) == str(md5_hash):
|
||||
return True
|
||||
else:
|
||||
return False
|
||||
|
||||
@@ -18,6 +18,14 @@ def get_from_module(identifier, module_params, module_name,
|
||||
return res(**kwargs)
|
||||
else:
|
||||
return res
|
||||
elif type(identifier) is dict:
|
||||
name = identifier.pop('name')
|
||||
res = module_params.get(name)
|
||||
if res:
|
||||
return res(**identifier)
|
||||
else:
|
||||
raise Exception('Invalid ' + str(module_name) + ': ' +
|
||||
str(identifier))
|
||||
return identifier
|
||||
|
||||
|
||||
@@ -26,24 +34,28 @@ def make_tuple(*args):
|
||||
|
||||
|
||||
class Progbar(object):
|
||||
def __init__(self, target, width=30, verbose=1):
|
||||
def __init__(self, target, width=30, verbose=1, interval=0.01):
|
||||
'''
|
||||
@param target: total number of steps expected
|
||||
@param interval: minimum visual progress update interval (in seconds)
|
||||
'''
|
||||
self.width = width
|
||||
self.target = target
|
||||
self.sum_values = {}
|
||||
self.unique_values = []
|
||||
self.start = time.time()
|
||||
self.last_update = 0
|
||||
self.interval = interval
|
||||
self.total_width = 0
|
||||
self.seen_so_far = 0
|
||||
self.verbose = verbose
|
||||
|
||||
def update(self, current, values=[]):
|
||||
def update(self, current, values=[], force=False):
|
||||
'''
|
||||
@param current: index of current step
|
||||
@param values: list of tuples (name, value_for_last_step).
|
||||
The progress bar will display averages for these values.
|
||||
@param force: force visual progress update
|
||||
'''
|
||||
for k, v in values:
|
||||
if k not in self.sum_values:
|
||||
@@ -56,6 +68,9 @@ class Progbar(object):
|
||||
|
||||
now = time.time()
|
||||
if self.verbose == 1:
|
||||
if not force and (now - self.last_update) < self.interval:
|
||||
return
|
||||
|
||||
prev_total_width = self.total_width
|
||||
sys.stdout.write("\b" * prev_total_width)
|
||||
sys.stdout.write("\r")
|
||||
@@ -119,5 +134,21 @@ class Progbar(object):
|
||||
info += ' %.4e' % avg
|
||||
sys.stdout.write(info + "\n")
|
||||
|
||||
self.last_update = now
|
||||
|
||||
def add(self, n, values=[]):
|
||||
self.update(self.seen_so_far + n, values)
|
||||
|
||||
|
||||
def display_table(rows, positions):
|
||||
|
||||
def display_row(objects, positions):
|
||||
line = ''
|
||||
for i in range(len(objects)):
|
||||
line += str(objects[i])
|
||||
line = line[:positions[i]]
|
||||
line += ' ' * (positions[i] - len(line))
|
||||
print(line)
|
||||
|
||||
for objects in rows:
|
||||
display_row(objects, positions)
|
||||
|
||||
@@ -1,6 +1,8 @@
|
||||
from __future__ import absolute_import
|
||||
from __future__ import print_function
|
||||
import h5py
|
||||
import numpy as np
|
||||
import sys
|
||||
from collections import defaultdict
|
||||
|
||||
|
||||
@@ -69,3 +71,17 @@ def load_array(name):
|
||||
a[:] = array[:]
|
||||
f.close()
|
||||
return a
|
||||
|
||||
|
||||
def ask_to_proceed_with_overwrite(filepath):
|
||||
get_input = input
|
||||
if sys.version_info[:2] <= (2, 7):
|
||||
get_input = raw_input
|
||||
overwrite = get_input('[WARNING] %s already exists - overwrite? '
|
||||
'[y/n]' % (filepath))
|
||||
while overwrite not in ['y', 'n']:
|
||||
overwrite = get_input('Enter "y" (overwrite) or "n" (cancel).')
|
||||
if overwrite == 'n':
|
||||
return False
|
||||
print('[TIP] Next time specify overwrite=True!')
|
||||
return True
|
||||
|
||||
+94
-143
@@ -1,168 +1,119 @@
|
||||
from __future__ import print_function
|
||||
import inspect
|
||||
import numpy as np
|
||||
import copy
|
||||
|
||||
from ..layers.advanced_activations import *
|
||||
from ..layers.core import *
|
||||
from ..layers.convolutional import *
|
||||
from ..layers.embeddings import *
|
||||
from ..layers.noise import *
|
||||
from ..layers.normalization import *
|
||||
from ..layers.recurrent import *
|
||||
from ..layers.wrappers import *
|
||||
from ..layers import containers
|
||||
from .. import regularizers
|
||||
from .. import constraints
|
||||
from .generic_utils import get_from_module
|
||||
from .np_utils import convert_kernel
|
||||
from ..layers import *
|
||||
from ..models import Model, Sequential, Graph
|
||||
from .. import backend as K
|
||||
|
||||
|
||||
def container_from_config(original_layer_dict, custom_objects={}):
|
||||
layer_dict = copy.deepcopy(original_layer_dict)
|
||||
name = layer_dict.get('name')
|
||||
def layer_from_config(config, custom_objects={}):
|
||||
'''
|
||||
# Arguments
|
||||
config: dict of the form {'class_name': str, 'config': dict}
|
||||
custom_objects: dict mapping class names (or function names)
|
||||
of custom (non-Keras) objects to class/functions
|
||||
|
||||
# Returns
|
||||
Layer instance (may be Model, Sequential, Graph, Layer...)
|
||||
'''
|
||||
# Insert custom layers into globals so they can
|
||||
# be accessed by `get_from_module`.
|
||||
for cls_key in custom_objects:
|
||||
globals()[cls_key] = custom_objects[cls_key]
|
||||
|
||||
if name == 'Merge':
|
||||
mode = layer_dict.get('mode')
|
||||
concat_axis = layer_dict.get('concat_axis')
|
||||
dot_axes = layer_dict.get('dot_axes')
|
||||
layers = layer_dict.get('layers')
|
||||
layer_list = []
|
||||
for layer in layers:
|
||||
init_layer = container_from_config(layer)
|
||||
layer_list.append(init_layer)
|
||||
merge_layer = Merge(layer_list, mode, concat_axis, dot_axes)
|
||||
return merge_layer
|
||||
class_name = config['class_name']
|
||||
|
||||
elif name == 'Sequential':
|
||||
layers = layer_dict.get('layers')
|
||||
layer_list = []
|
||||
for layer in layers:
|
||||
init_layer = container_from_config(layer)
|
||||
layer_list.append(init_layer)
|
||||
seq_layer = containers.Sequential(layer_list)
|
||||
return seq_layer
|
||||
|
||||
elif name == 'Graph':
|
||||
graph_layer = containers.Graph()
|
||||
inputs = layer_dict.get('input_config')
|
||||
|
||||
for input in inputs:
|
||||
graph_layer.add_input(**input)
|
||||
|
||||
nodes = layer_dict.get('node_config')
|
||||
for node in nodes:
|
||||
layer = container_from_config(layer_dict['nodes'].get(node['name']))
|
||||
node['layer'] = layer
|
||||
node['create_output'] = False # outputs will be added below
|
||||
graph_layer.add_node(**node)
|
||||
|
||||
outputs = layer_dict.get('output_config')
|
||||
for output in outputs:
|
||||
graph_layer.add_output(**output)
|
||||
return graph_layer
|
||||
|
||||
elif name == 'AutoEncoder':
|
||||
kwargs = {'encoder': container_from_config(layer_dict.get('encoder_config')),
|
||||
'decoder': container_from_config(layer_dict.get('decoder_config'))}
|
||||
for kwarg in ['output_reconstruction', 'weights']:
|
||||
if kwarg in layer_dict:
|
||||
kwargs[kwarg] = layer_dict[kwarg]
|
||||
return AutoEncoder(**kwargs)
|
||||
|
||||
elif name == 'TimeDistributed':
|
||||
child_layer = container_from_config(layer_dict.pop('layer'))
|
||||
# the "name" keyword argument of layers is saved as "custom_name"
|
||||
if 'custom_name' in layer_dict:
|
||||
layer_dict['name'] = layer_dict.pop('custom_name')
|
||||
return TimeDistributed(child_layer, **layer_dict)
|
||||
|
||||
else: # this is a non-topological layer (e.g. Dense, etc.)
|
||||
layer_dict.pop('name')
|
||||
|
||||
for k, v in layer_dict.items():
|
||||
# a dictionary argument may be a regularizer or constraint
|
||||
if isinstance(v, dict):
|
||||
vname = v.pop('name')
|
||||
if vname in [x for x, y in inspect.getmembers(constraints, predicate=inspect.isclass)]:
|
||||
layer_dict[k] = constraints.get(vname, v)
|
||||
elif vname in [x for x, y in inspect.getmembers(regularizers, predicate=inspect.isclass)]:
|
||||
layer_dict[k] = regularizers.get(vname, v)
|
||||
else:
|
||||
# not a regularizer of constraint, don't touch it
|
||||
v['name'] = vname
|
||||
|
||||
# the "name" keyword argument of layers is saved as "custom_name"
|
||||
if 'custom_name' in layer_dict:
|
||||
layer_dict['name'] = layer_dict.pop('custom_name')
|
||||
|
||||
base_layer = get_layer(name, layer_dict)
|
||||
return base_layer
|
||||
if class_name == 'Sequential':
|
||||
layer_class = Sequential
|
||||
elif class_name == 'Graph':
|
||||
layer_class = Graph
|
||||
elif class_name in ['Model', 'Container']:
|
||||
layer_class = Model
|
||||
else:
|
||||
layer_class = get_from_module(class_name, globals(), 'layer',
|
||||
instantiate=False)
|
||||
return layer_class.from_config(config['config'])
|
||||
|
||||
|
||||
def model_summary(model):
|
||||
param_count = 0 # param count in the model
|
||||
def print_summary(layers, relevant_nodes=None, line_length=100, positions=[.33, .55, .67, 1.]):
|
||||
# line_length: total length of printed lines
|
||||
# positions: relative or absolute positions of log elements in each line
|
||||
if positions[-1] <= 1:
|
||||
positions = [int(line_length * p) for p in positions]
|
||||
# header names for the different log elements
|
||||
to_display = ['Layer (type)', 'Output Shape', 'Param #', 'Connected to']
|
||||
|
||||
def display(objects, positions):
|
||||
def print_row(fields, positions):
|
||||
line = ''
|
||||
for i in range(len(objects)):
|
||||
line += str(objects[i])
|
||||
for i in range(len(fields)):
|
||||
line += str(fields[i])
|
||||
line = line[:positions[i]]
|
||||
line += ' ' * (positions[i] - len(line))
|
||||
print(line)
|
||||
|
||||
def display_layer_info(layer, name, positions):
|
||||
layer_type = layer.__class__.__name__
|
||||
output_shape = layer.output_shape
|
||||
params = layer.count_params()
|
||||
to_display = ['%s (%s)' % (layer_type, name), output_shape, params]
|
||||
display(to_display, positions)
|
||||
print('_' * line_length)
|
||||
print_row(to_display, positions)
|
||||
print('=' * line_length)
|
||||
|
||||
line_length = 80 # total length of printed lines
|
||||
positions = [30, 60, 80] # absolute positions of log elements in each line
|
||||
# header names for the different log elements
|
||||
to_display = ['Layer (name)', 'Output Shape', 'Param #']
|
||||
def print_layer_summary(layer):
|
||||
try:
|
||||
output_shape = layer.output_shape
|
||||
except:
|
||||
output_shape = 'multiple'
|
||||
connections = []
|
||||
for node_index, node in enumerate(layer.inbound_nodes):
|
||||
if relevant_nodes:
|
||||
node_key = layer.name + '_ib-' + str(node_index)
|
||||
if node_key not in relevant_nodes:
|
||||
# node is node part of the current network
|
||||
continue
|
||||
for i in range(len(node.inbound_layers)):
|
||||
inbound_layer = node.inbound_layers[i].name
|
||||
inbound_node_index = node.node_indices[i]
|
||||
inbound_tensor_index = node.tensor_indices[i]
|
||||
connections.append(inbound_layer + '[' + str(inbound_node_index) + '][' + str(inbound_tensor_index) + ']')
|
||||
|
||||
# for sequential models, we start by printing
|
||||
# the expect input shape
|
||||
if model.__class__.__name__ == 'Sequential':
|
||||
print('-' * line_length)
|
||||
print('Initial input shape: ' + str(model.input_shape))
|
||||
name = layer.name
|
||||
cls_name = layer.__class__.__name__
|
||||
if not connections:
|
||||
first_connection = ''
|
||||
else:
|
||||
first_connection = connections[0]
|
||||
fields = [name + ' (' + cls_name + ')', output_shape, layer.count_params(), first_connection]
|
||||
print_row(fields, positions)
|
||||
if len(connections) > 1:
|
||||
for i in range(1, len(connections)):
|
||||
fields = ['', '', '', connections[i]]
|
||||
print_row(fields, positions)
|
||||
|
||||
# print header
|
||||
print('-' * line_length)
|
||||
display(to_display, positions)
|
||||
print('-' * line_length)
|
||||
total_params = 0
|
||||
for i in range(len(layers)):
|
||||
print_layer_summary(layers[i])
|
||||
if i == len(layers) - 1:
|
||||
print('=' * line_length)
|
||||
else:
|
||||
print('_' * line_length)
|
||||
total_params += layers[i].count_params()
|
||||
|
||||
if model.__class__.__name__ == 'Sequential':
|
||||
for layer in model.layers:
|
||||
name = getattr(layer, 'name', 'Unnamed')
|
||||
display_layer_info(layer, name, positions)
|
||||
param_count += layer.count_params()
|
||||
|
||||
elif model.__class__.__name__ == 'Graph':
|
||||
for name in model.input_order:
|
||||
layer = model.inputs[name]
|
||||
display_layer_info(layer, name, positions)
|
||||
|
||||
for name in model.nodes:
|
||||
layer = model.nodes[name]
|
||||
display_layer_info(layer, name, positions)
|
||||
param_count += layer.count_params()
|
||||
|
||||
for name in model.output_order:
|
||||
layer = model.outputs[name]
|
||||
display_layer_info(layer, name, positions)
|
||||
|
||||
print('-' * line_length)
|
||||
print('Total params: %s' % param_count)
|
||||
print('-' * line_length)
|
||||
print('Total params: %s' % total_params)
|
||||
print('_' * line_length)
|
||||
|
||||
|
||||
from .generic_utils import get_from_module
|
||||
def get_layer(identifier, kwargs=None):
|
||||
return get_from_module(identifier, globals(), 'layer',
|
||||
instantiate=True, kwargs=kwargs)
|
||||
def convert_all_kernels_in_model(model):
|
||||
# Note: SeparableConvolution not included
|
||||
# since only supported by TF.
|
||||
conv_classes = {
|
||||
'Convolution1D',
|
||||
'Convolution2D',
|
||||
'Convolution3D',
|
||||
'AtrousConvolution2D',
|
||||
'Deconvolution2D',
|
||||
}
|
||||
to_assign = []
|
||||
for layer in model.layers:
|
||||
if layer.__class__.__name__ in conv_classes:
|
||||
original_w = K.get_value(layer.W)
|
||||
converted_w = convert_kernel(original_w)
|
||||
to_assign.append((layer.W, converted_w))
|
||||
K.batch_set_value(to_assign)
|
||||
|
||||
@@ -9,7 +9,6 @@ def to_categorical(y, nb_classes=None):
|
||||
'''Convert class vector (integers from 0 to nb_classes)
|
||||
to binary class matrix, for use with categorical_crossentropy.
|
||||
'''
|
||||
y = np.asarray(y, dtype='int32')
|
||||
if not nb_classes:
|
||||
nb_classes = np.max(y)+1
|
||||
Y = np.zeros((len(y), nb_classes))
|
||||
@@ -51,3 +50,84 @@ def probas_to_classes(y_pred):
|
||||
|
||||
def categorical_probas_to_classes(p):
|
||||
return np.argmax(p, axis=1)
|
||||
|
||||
|
||||
def convert_kernel(kernel, dim_ordering='th'):
|
||||
'''Converts a kernel matrix (Numpy array)
|
||||
from Theano format to TensorFlow format
|
||||
(or reciprocally, since the transformation
|
||||
is its own inverse).
|
||||
'''
|
||||
new_kernel = np.copy(kernel)
|
||||
if kernel.ndim == 4:
|
||||
# conv 2d
|
||||
# TH kernel shape: (depth, input_depth, rows, cols)
|
||||
# TF kernel shape: (rows, cols, input_depth, depth)
|
||||
if dim_ordering == 'th':
|
||||
w = kernel.shape[2]
|
||||
h = kernel.shape[3]
|
||||
for i in range(w):
|
||||
for j in range(h):
|
||||
new_kernel[:, :, i, j] = kernel[:, :, w - i - 1, h - j - 1]
|
||||
elif dim_ordering == 'tf':
|
||||
w = kernel.shape[0]
|
||||
h = kernel.shape[1]
|
||||
for i in range(w):
|
||||
for j in range(h):
|
||||
new_kernel[i, j, :, :] = kernel[w - i - 1, h - j - 1, :, :]
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + str(dim_ordering))
|
||||
elif kernel.ndim == 5:
|
||||
# conv 3d
|
||||
# TH kernel shape: (out_depth, input_depth, kernel_dim1, kernel_dim2, kernel_dim3)
|
||||
# TF kernel shape: (kernel_dim1, kernel_dim2, kernel_dim3, input_depth, out_depth)
|
||||
if dim_ordering == 'th':
|
||||
w = kernel.shape[2]
|
||||
h = kernel.shape[3]
|
||||
z = kernel.shape[4]
|
||||
for i in range(w):
|
||||
for j in range(h):
|
||||
for k in range(z):
|
||||
new_kernel[:, :, i, j, k] = kernel[:, :,
|
||||
w - i - 1,
|
||||
h - j - 1,
|
||||
z - k - 1]
|
||||
elif dim_ordering == 'tf':
|
||||
w = kernel.shape[0]
|
||||
h = kernel.shape[1]
|
||||
z = kernel.shape[2]
|
||||
for i in range(w):
|
||||
for j in range(h):
|
||||
for k in range(z):
|
||||
new_kernel[i, j, k, :, :] = kernel[w - i - 1,
|
||||
h - j - 1,
|
||||
z - k - 1,
|
||||
:, :]
|
||||
else:
|
||||
raise Exception('Invalid dim_ordering: ' + str(dim_ordering))
|
||||
else:
|
||||
raise ValueError('Invalid kernel shape:', kernel.shape)
|
||||
return new_kernel
|
||||
|
||||
|
||||
def conv_output_length(input_length, filter_size, border_mode, stride, dilation=1):
|
||||
if input_length is None:
|
||||
return None
|
||||
assert border_mode in {'same', 'valid'}
|
||||
dilated_filter_size = filter_size + (filter_size - 1) * (dilation - 1)
|
||||
if border_mode == 'same':
|
||||
output_length = input_length
|
||||
elif border_mode == 'valid':
|
||||
output_length = input_length - dilated_filter_size + 1
|
||||
return (output_length + stride - 1) // stride
|
||||
|
||||
|
||||
def conv_input_length(output_length, filter_size, border_mode, stride):
|
||||
if output_length is None:
|
||||
return None
|
||||
assert border_mode in {'same', 'valid'}
|
||||
if border_mode == 'same':
|
||||
pad = filter_size // 2
|
||||
elif border_mode == 'valid':
|
||||
pad = 0
|
||||
return (output_length - 1) * stride - 2 * pad + filter_size
|
||||
|
||||
Alguns arquivos não foram exibidos porque demasiados arquivos foram alterados neste diff Mostrar Mais
Referência em uma Nova Issue
Bloquear um usuário